Final Project Outline¶
The Idea¶
I started to play tennis at the age of 11, and I really love the sport. It is a very complex game that heavily uses physics and fluid dynamics, both of which are very interesting. I am especially interested in the impact that spin has on the game play. For example, topspin (when the ball spins forwards) is essential to bringing the tennis ball back to the ground. Theoretically, you can hit a ball very high and make it come back down if you put enough topspin on it. A ball with topspin also jumps forward when it hits the ground. Sidespin is important during the serve (which starts the point). Serving with sidespin could confuse the opponent, as the ball will jump laterally when it hits the ground. The most difficult spin to work with is backspin. When the ball spins backwards, it is very easily carried off of the court (out of bounds). So, you must control the ball when putting backspin. When it hits the ground, these shots usually skid along the ground and are difficult to return.
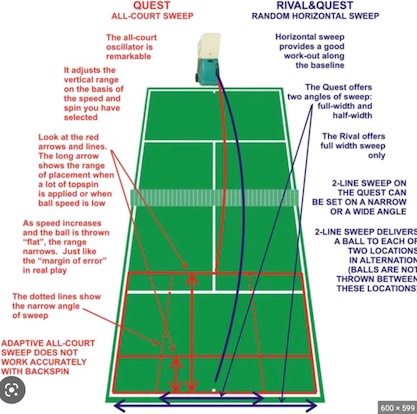
Recently, I have been trying to find time to play tennis with my friends, but alas they are all very busy. Rarely do I have get the chance to play with other people and improve my own skills. So, for my Fab Academy final project, I decided to build a tennis ball machine. A ball machine has the capability to automatically feed balls to me. Usually, I would put ball machine at the center of the other side of the court and let it feed balls towards me, as illustrated by the diagram below:
My ball machine will have a large basket at the top to hold the tennis balls. At the bottom of the basket, there will be a rotating plate-holder that holds 4 balls at once. It will guide one ball at a time down a short pipe to the launching point. Then it will pass through two motors (one on top and one on bottom). The motors could be adjusted using a control panel built into the launcher. You can adjust the tennis ball’s launching angle (height), its speed (velocity), and the rotational speed of the ball (top/down spin). I also want the ball machine to recognize patterns. For example, it can hit one ball to the left, then another to the center, then right. Additionally, there will also be a remote controlled switch for the machine.
The design of the machine was inspired by the Playmate ball machine:

To come up with a solid plan, I first did a little bit of research. I found this tutorial on the popular website Instructables on the ball machine. I think I will use this instructables as a guide rail for my final project. However, this tutorial doesn’t include a way to adjust the speed, height, or spin of the ball. It is relatively basic in that there is only a bare framework for the ball to go through. So, my plan is to expand on the original idea and make something better (this literally defines innovation).
Weekly Plan¶
| Week | Final Project Development |
|---|---|
| Computer Aided Design | Designing my final project in Fusion 360 |
| Computer Controlled Cutting | Making the basket to hold the tennis balls out of wood, also making the mainframe for the machine (but that may come later). Making the stickers to go on top of the ball machine. I will also use the laser cutter to engrave designs on the sides of the wooden boards. |
| Electronics Production | Cutting out the board to control the ball machine – including for adjusting the speed of the motors and other features aforementioned. |
| 3D Scanning and Printing | 3D printing out the frame (as shown in the Instructables link I put earlier) that holds the motors. I will design them in fusion 360 and probably also design the screws as well to hold the parts together (or perhaps just use metal ones). |
| Electronics Design | I will continue my work from Electronics Design |
| Computer Controlled Machining | I will continue my work from the Computer Controlled Cutting week. |
| Embedded Programming | Programming the board(s) I cut out earlier from Electronics Design week. |
| Molding and Casting | Molding out the physical motors. I will need to make them abrasive by sanding them. |
| Input Devices | Continue to tweek the board for the board for controlling the motors. |
| Output Devices | Continuing from the Input Devices week, I will need to make sure that the motors spin and rotate correctly according to the inputs. |
| Applications and Implications | TBD |
| Networking and Communications | Making a remote controller for the ball machine so that it could be turned on and off. |
| Mechanical Design | Continuing from Computer Controlled Cutting, I will tweek the boards and main frame. |
| Interface Application and Programming | Continuing to program the board for the machine. |
| Machine Design | Tweek the motors and the rotary plate the bottom of the ball machine. I will also improve the frame for holding the motors |
| Wildcard Week | TBD |
| Invention, Intellectual | TBD |
(On a side note, I used this website to build the table).
Sketch¶
This is my basic sketch for the ball machine:
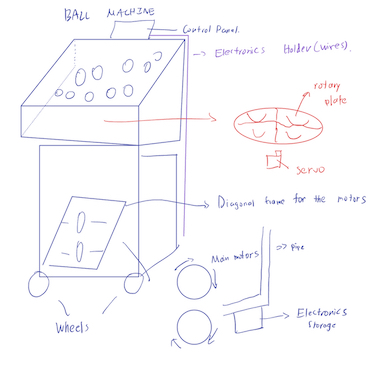
Regarding the electronics, I will put them underneath the pipe, near the motors. This will protect them and allow them to control the motors better.
Metal Frame¶
The metal framework could be ordered from vex robotics. The concept includes a metal lego as a frame to hold the wheels in place and keep the wheels from flying out. 8020 could be another option for building the frames.
Inspiration from other’s Design¶
Originally, I wanted to build a replica of an expensive tennis ball machine that has several settings:
- Changing the ball’s velocity.
- Height
- Spin
- Direction
- Save and fire a pattern.
- Feed rate
However, the problem with changing the direction of the ball is that I have to rotate the entire bed using a servo motor, which requires a lot of energy. Also, the machine might break if it is trying to fire and rotate at the same time. Also, the height of the ball is hard to change as I must move the barrel that the balls come out from. Since I do not plan to change these 2 parameters, firing a pattern is also not practical.
This is the interface that I am aiming for:

It is more simple than the one that I had in mind, but I think this will increase the chance of completing the project on time.