Project Updates
Design Shift
I met with Dr. Fagan who suggested that I slightly change my design to where the motor is at the axis the screen is rotating around.
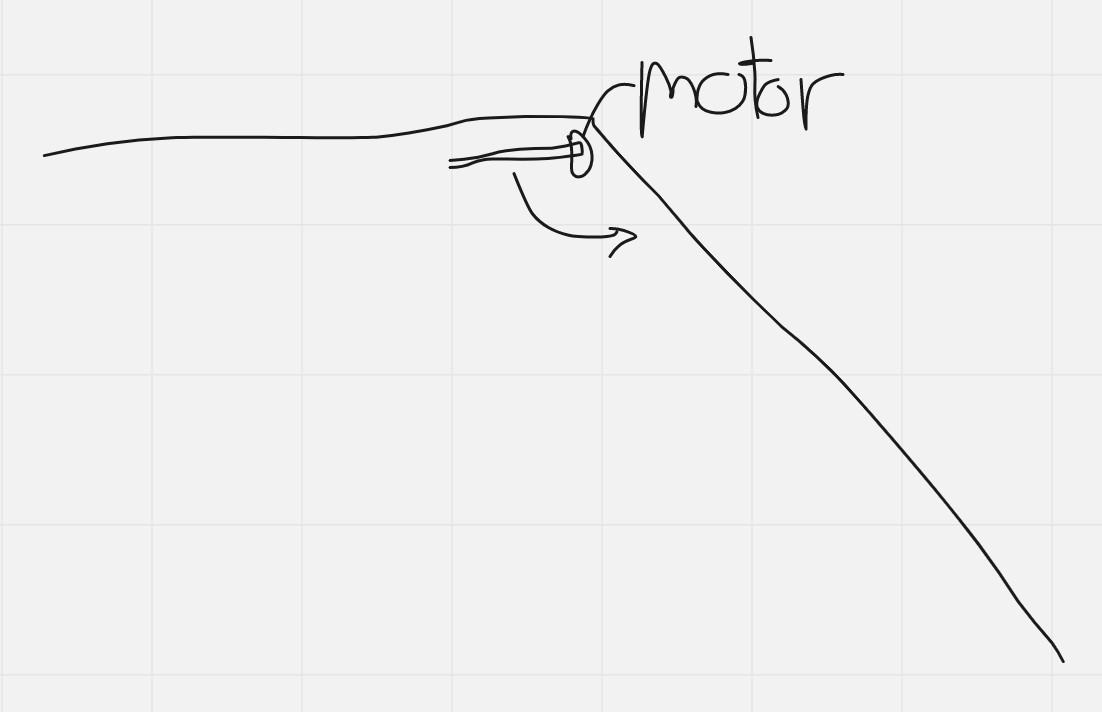
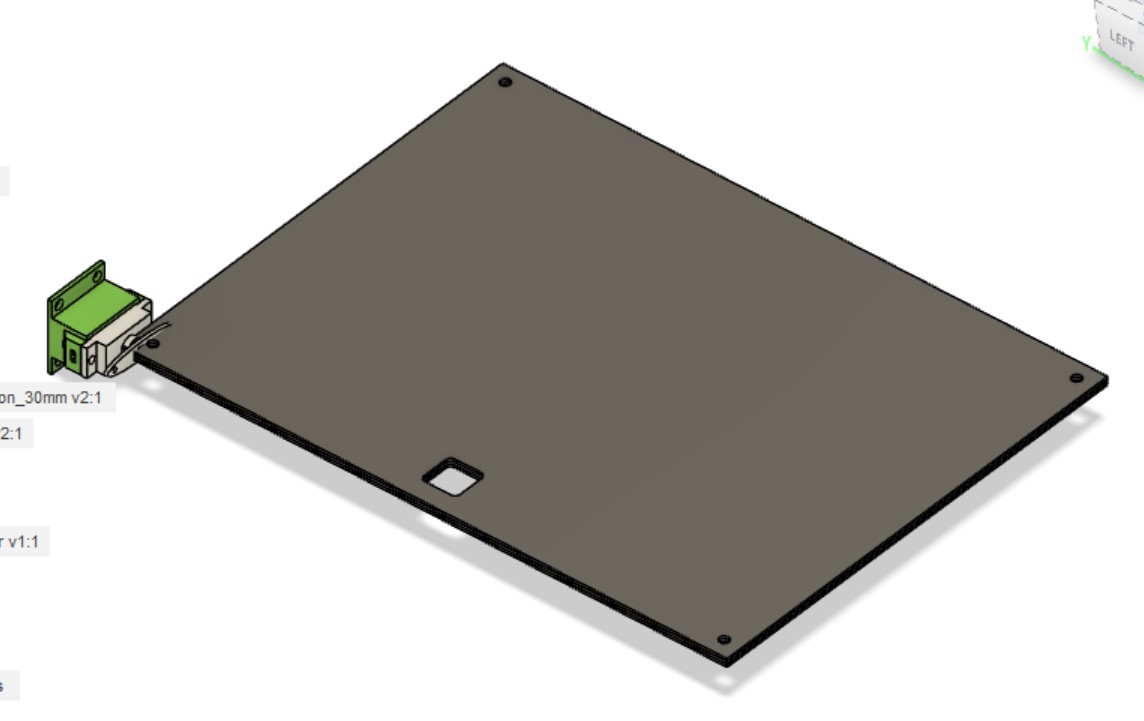
Using this servo motor case model, I adapted my design. Since I'm not sure what motor I'll use yet, I didn't design the attachment mechanism between the motor shaft and the screen.
Next if the weight of my screen and case is x, I want to know the minimum torque for a motor to be able to turn it. Dr. Fagan taught me that I can calculate the torque by multiplying the gravitational force by the distance between the axis of rotation and the center of mass, and I can ignore the angle since it starts horizontal and sin0 (deg) = 1. He then said I should multiply the result by a safety factor of two.
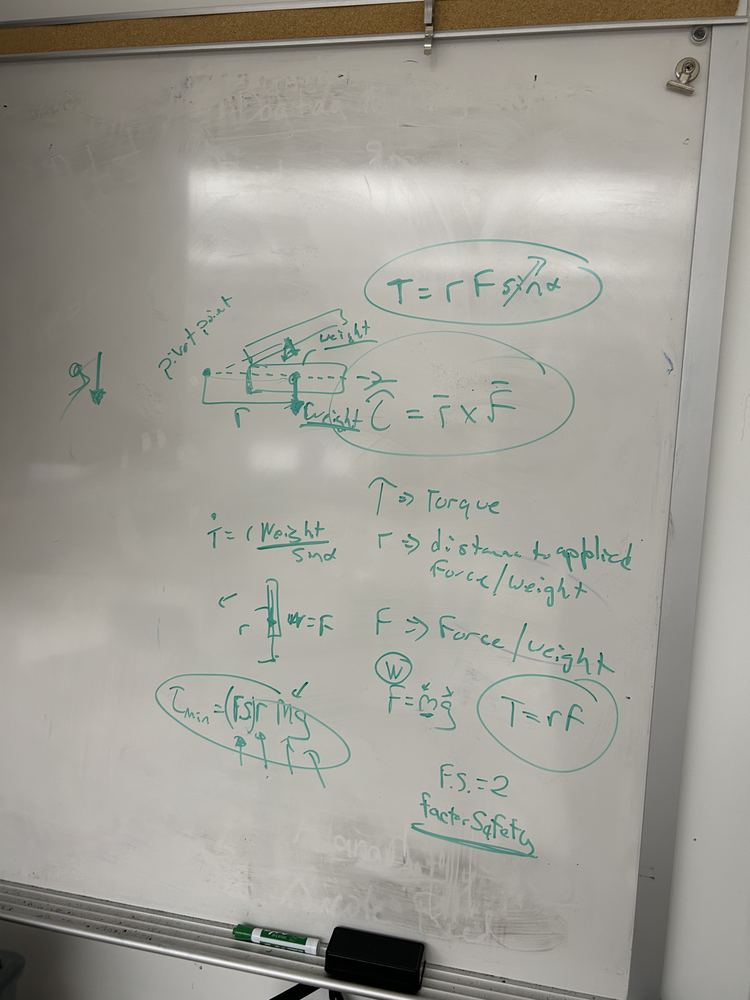
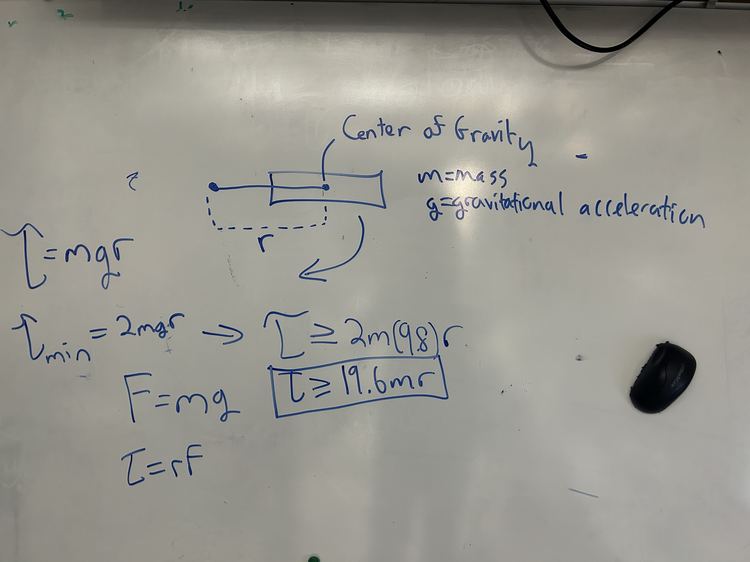
Here's my understanding of it simplified to an inequality for which I can plug in my material and design once it's finalized: torque >= 19.6 * m * r where m is the mass and r is the distance from the motor to the center of gravity.
Another Idea
Also, beyond the MVP, I'd like to implement notifications when there is low battery to make sure that the user is never in a situation where the device fails during an encounter with law enforcement.