Programming & Electronics System Testing¶
Firstly i referred the datasheet of DS3231 and I link it here
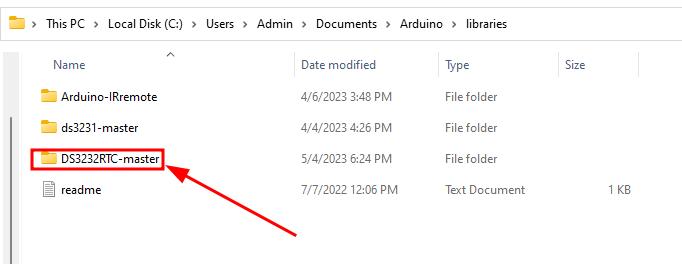
I downloaded the ds3231 RTC module library in arduino. The link is here.
To add the library in IDE I moved the downloaded folder in the libraries under Arduino IDE.
I learned how to programme DS32331 real time clock module. The RTC module is completely new for me I need to begin with lots of tutorials. I referred this link.
DS3231 - It has DS3231 chip which is extremely accurate - It works agt low power () - has built in temperature sensor - To store time and date inside it’s memory it has 24c32 EEPROM - has rechargeable battery to keep track of time when power is disconnected. - Communicates over I2C
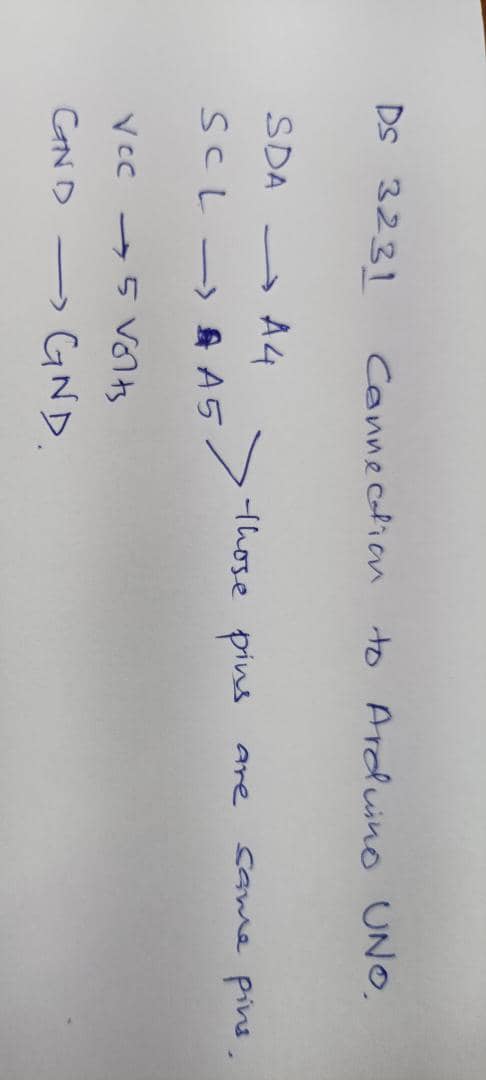
Connections
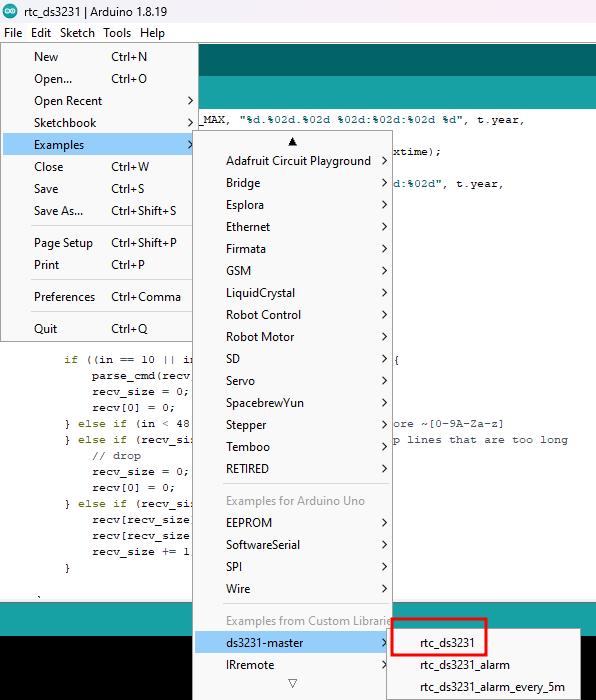
I used the example code to programme and did serial monitor and it worked. But I couldn’t change the time and date to current one.
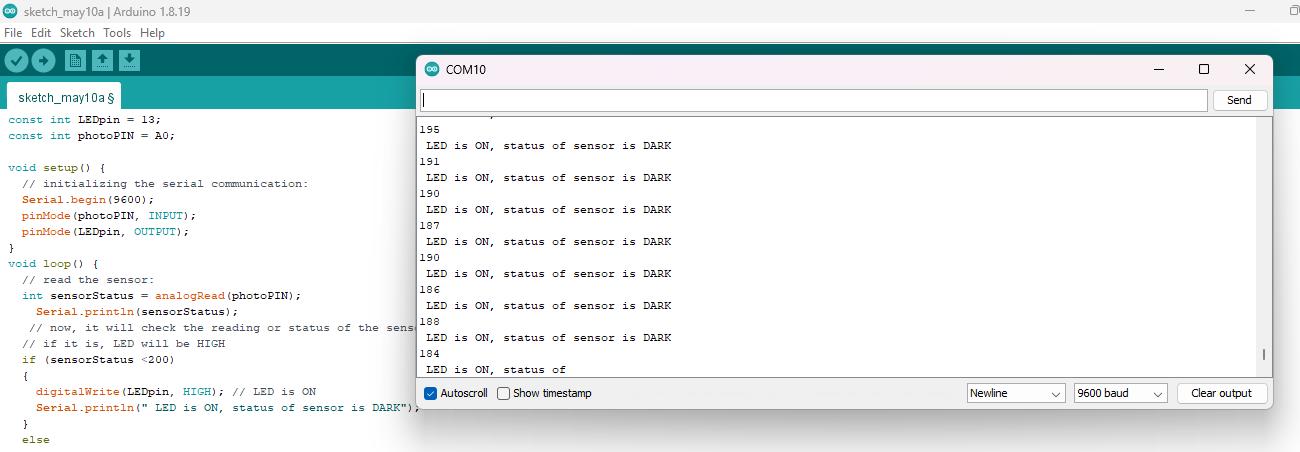
I wanted to let the LED glow when there is darkness. For this I decided to use LDR sensor. I did a LDR sensor test in arduino and now I added it in board design. This is the code I used to test LDR sensor on Arduino and did a serial monitor.
const int LEDpin = 13;
const int photoPIN = A0;
void setup() {
// initializing the serial communication:
Serial.begin(9600);
pinMode(photoPIN, INPUT);
pinMode(LEDpin, OUTPUT);
}
void loop() {
// read the sensor:
int sensorStatus = analogRead(photoPIN);
Serial.println(sensorStatus);
// now, it will check the reading or status of the sensor is < 200
// if it is, LED will be HIGH
if (sensorStatus <200)
{
digitalWrite(LEDpin, HIGH); // LED is ON
Serial.println(" LED is ON, status of sensor is DARK");
}
else
{
digitalWrite(LEDpin, LOW);
Serial.println(" ***************");
}
}
For my project I need to drive multiple servo. For now I will drive servo with arduino using milli functions as it is something new for me. For this I checked this tutorial. I gave the clock timing. Servo 1 drives at every second and servo 2 drives at every one minute and it worked for now.
Code I used is here
#include <Servo.h>
Servo hourServo;
Servo minuteServo;
Servo secondServo;
const int hourHandPin = 9; // Pin for the hour hand servo
const int minuteHandPin = 8; // Pin for the minute hand servo
const int secondHandPin = 7; // Pin for the second hand servo
const int hourOffset = 90; // Offset angle for the hour hand (adjust as needed)
const int minuteOffset = 90; // Offset angle for the minute hand (adjust as needed)
const int secondOffset = 90; // Offset angle for the second hand (adjust as needed)
void setup() {
hourServo.attach(hourHandPin); // Connect hour hand servo to pin 9
minuteServo.attach(minuteHandPin); // Connect minute hand servo to pin 10
secondServo.attach(secondHandPin); // Connect second hand servo to pin 11
}
void loop() {
// Get current time
unsigned long currentTime = millis();
unsigned long seconds = currentTime / 1000;
unsigned long minutes = seconds / 60;
unsigned long hours = minutes / 60;
// Calculate angles for the servo motors
int secondAngle = (seconds % 60) * 6; // 6 degrees per second
int minuteAngle = (minutes % 60) * 6; // 6 degrees per minute
int hourAngle = ((hours % 12) * 30) + ((minutes % 60) / 2); // 30 degrees per hour, 0.5 degrees per minute
// Set servo angles
hourServo.write(hourAngle + hourOffset);
minuteServo.write(minuteAngle + minuteOffset);
secondServo.write(secondAngle + secondOffset);
delay(1000); // Update the clock every second
}
Testing LED board
To test the led board I uploaded the blink example code from IDE and it worked.
Then tested the led strip controlled by relay and it worked. The code is same as blink led code example. I replaced blink led pin to the relay pin.
void setup() {
pinMode(8, OUTPUT);
}
void loop() {
digitalWrite(8, HIGH);
delay(1000);
digitalWrite(8, LOW);
delay(1000);
}
LDR Testing
I want to use the white mono colour LED and which is of 12V. Since from my board I can provide only 5V I used external supply to LED and connected to the relay.
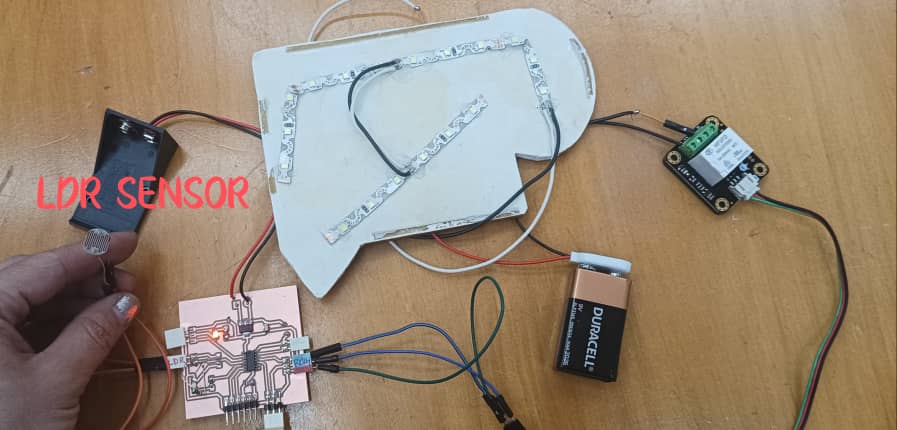
On my board I connected LDR sensor to PA6(2) which is photoPin and I defined the relay pin in place of LEDpin. I referred this and uploaded the code below and it worked.
const int LEDpin = 8;
const int photoPIN = 2;
void setup() {
// initializing the serial communication:
Serial.begin(9600);
pinMode(photoPIN, INPUT);
pinMode(LEDpin, OUTPUT);
}
void loop() {
// read the sensor:
int sensorStatus = analogRead(photoPIN);
Serial.println(sensorStatus);
// now, it will check the reading or status of the sensor is > 200
// if it is, LED will be HIGH
if (sensorStatus >200)
{
digitalWrite(LEDpin, HIGH); // LED is ON
Serial.println(" LED is ON, status of sensor is DARK");
}
else
{
digitalWrite(LEDpin, LOW);
Serial.println(" ***************");
}
}
Testing mechanism using arduino Mega
Since the board I was not working I used arduino mega to test the mechanical part. I connected all three servos to the PWM pins (2,3,6). I moved the servo one by one and tested all together
I uploaded the example sweep code from Arduino IDE.
#include <Servo.h>
Servo Servo; // create servo object to control a servo
int pos = 90; // variable to store the initial servo position
void setup() {
Servo.attach(2); // attaches the servo on pin 2 to the servo object
}
void loop() {
Servo.write(70); // tell servo to go rotate CW @ fulll speed
delay(2000); // waits 2seconds
Servo.write(180); // tell servo to go to rotate CCW @ full speed
delay(500); // waits 500 ms
Servo.write(90); // tell servo to stop rotating
delay(3000); // waits 3seconds
}
Testing all servos together.
In the same example code I added the servo object as I have three servos.
#include <Servo.h>
Servo ServoMonth; // create servo object to control a servo
Servo ServoDate; // create servo object to control a servo
Servo ServoDay; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 90; // variable to store the initial servo position
void setup() {
ServoMonth.attach(4); // attaches the servo on pin 2 to the servo object
ServoDate.attach(2); // attaches the servo on pin 2 to the servo object
ServoDay.attach(3); // attaches the servo on pin 2 to the servo object
}
void loop() {
// ServoMonth.write(70); // tell servo to go rotate CW @ fulll speed
// delay(500); // waits 2seconds
// // ServoMonth.write(180); // tell servo to go to rotate CCW @ full speed
// // delay(500); // waits 500 ms
// ServoMonth.write(90); // tell servo to stop rotating
// delay(2000); // waits 3seconds
ServoDate.write(70); // tell servo to go rotate CW @ fulll speed
delay(500); // waits 2seconds
// ServoDate.write(180); // tell servo to go to rotate CCW @ full speed
// delay(500); // waits 500 ms
ServoDate.write(90); // tell servo to stop rotating
delay(2000); // waits 3seconds
ServoDay.write(70); // tell servo to go rotate CW @ fulll speed
delay(500); // waits 2seconds
// ServoDay.write(180); // tell servo to go to rotate CCW @ full speed
// delay(500); // waits 500 ms
ServoDay.write(90); // tell servo to stop rotating
delay(2000); // waits 3seconds
}
Testing my servo board.
I uploaded the code as below.
- Select the board
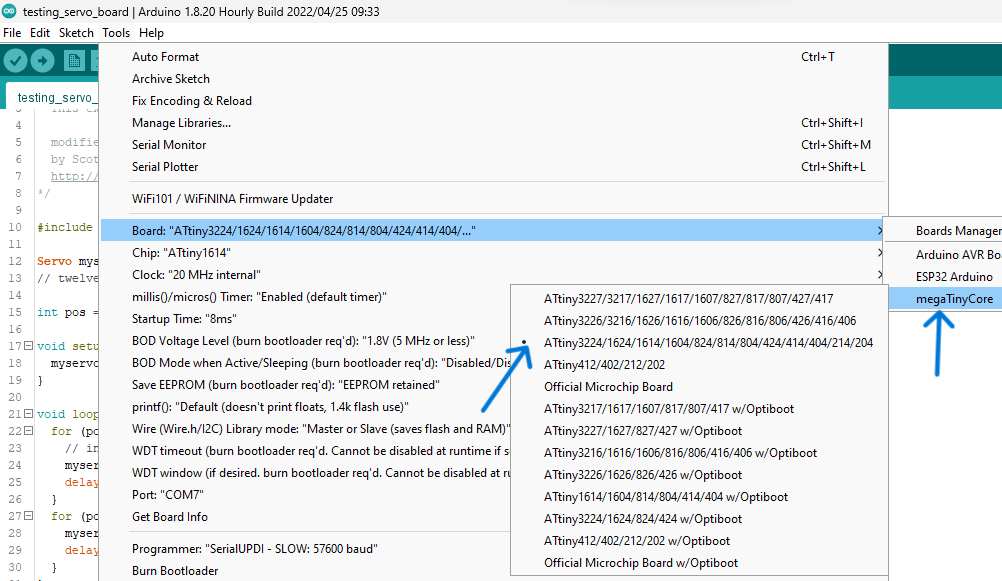
-
Select the chip
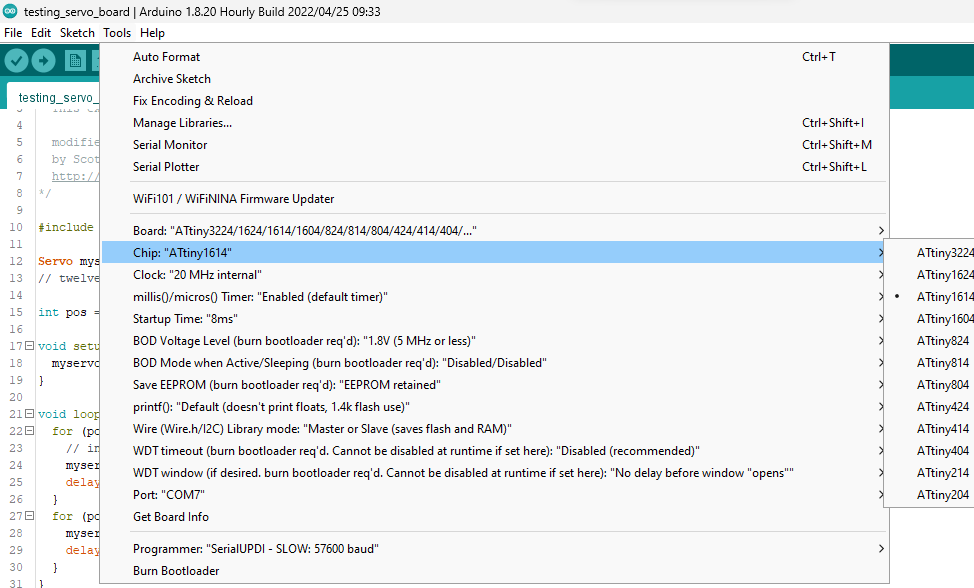
-
Select the programmer
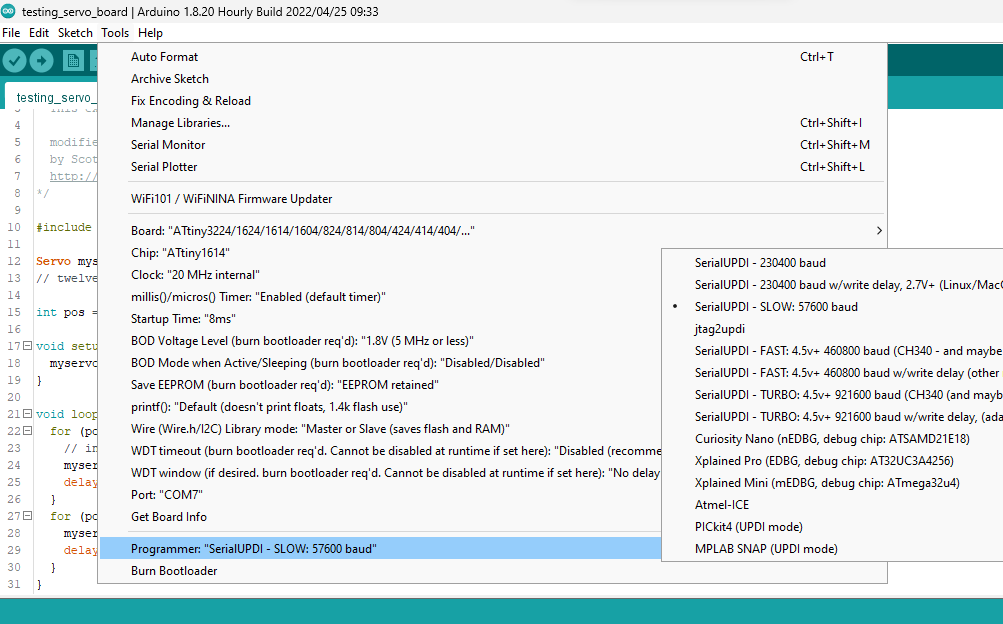
-
Select the port
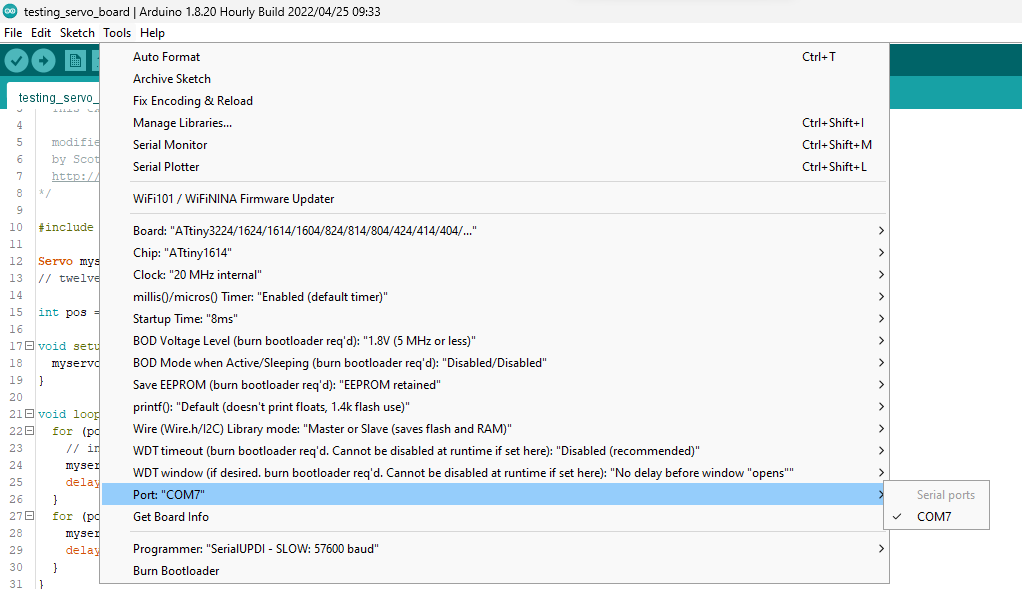
-
Compile and verify the code
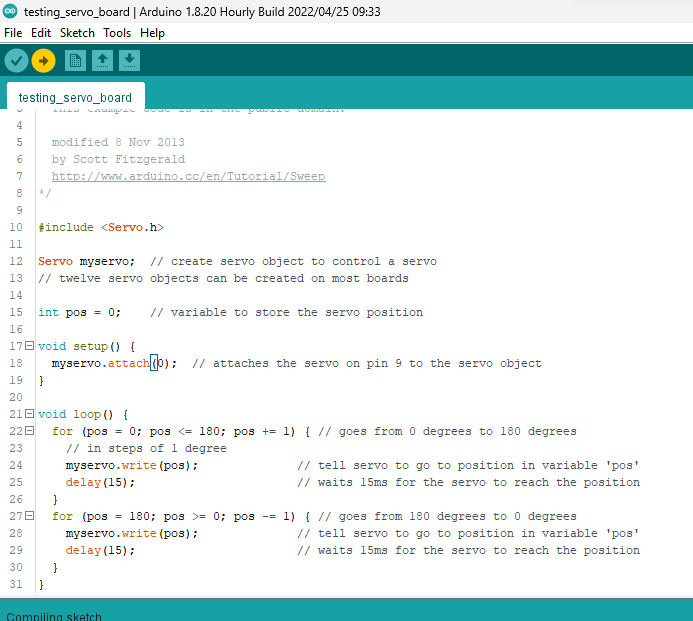
- Upload the code.
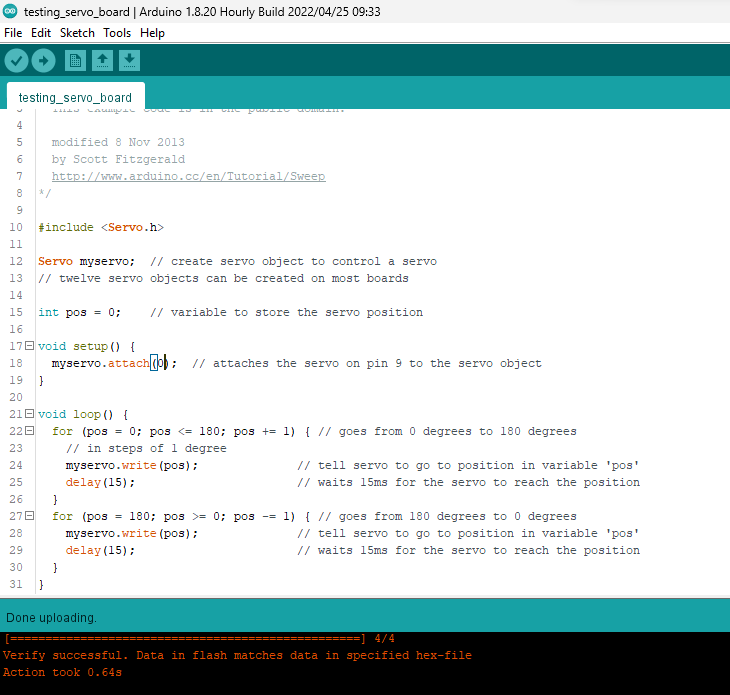
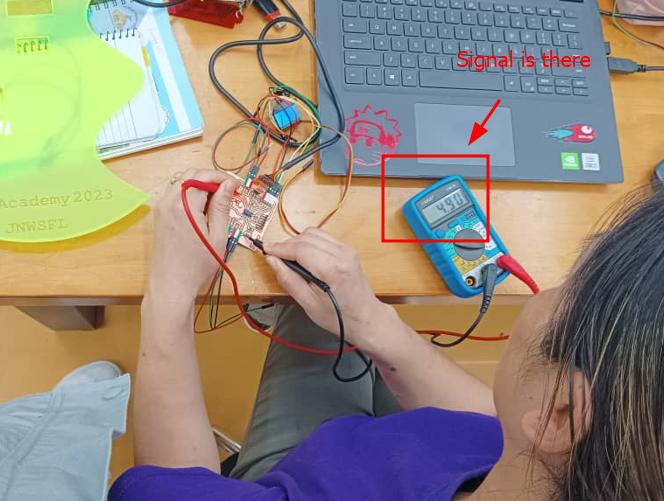
Guru Rico helped me with codding to test the board with the following code and it worked. For this I did not use servo motors instead I used multimeter to see the signal lines and it worked. In the signal lines it shows 4.9V when the signal is passing.
// Yeshey Wangmo's FP board pin test program
// by Yeshey Wangmo & Rico Kanthatham, Fab Academy 2023, Bhutan
#include <Servo.h>
Servo myservo;
// Variables to represent all INPUT and OUTPUT pins on the Final Project Board
int ledPIN = 3;
int servo1 = 0;
int servo2 = 1;
int servo3 = 10;
int sclPin = 7;
int sdaPin = 6;
int pos = 0;
// the setup function runs once when you press reset or power the board
void setup() {
Serial.begin(9600);
pinMode(ledPIN, OUTPUT);
myservo.attach(servo1);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(ledPIN, HIGH); // turn the LED on (HIGH is the voltage level)
Serial.println("LED ON");
delay(2000); // wait for a second
digitalWrite(ledPIN, LOW); // turn the LED off by making the voltage LOW
Serial.println("LED OFF");
delay(1000); // wait for a second
//Use the code below to check if individual signal pins receiving 5V...change the name of the pin receive HIGH signal
digitalWrite(servo3, HIGH); // turn the LED on (HIGH is the voltage level)
Serial.println("Pin ON");
delay(3000); // wait for a second
digitalWrite(servo3, LOW); // turn the LED off by making the voltage LOW
Serial.println("Pin OFF");
delay(3000); // wait for a second
//code for testing servo motion
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}