Final project description¶
As part of my PhD research, I am working on the development of a pneumatic endoscope, and I will work on that as well in this Fab Academy project.
An endoscope is basically a tube, which is used for the exploration and treatment of the digestive tract in a minimally invasive way.
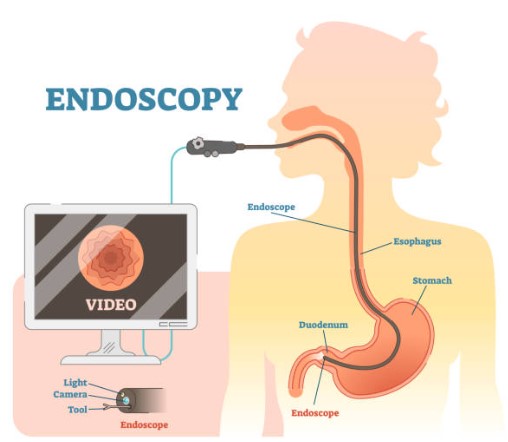
Image from this website
In this research, the proximal part of the tube is actuated by air, like a softrobot, to enable it to bend and navigate its way through the sinuous digestive tract. It differs from a conventional endoscope where the bending is made thanks to a cable actuation.

In addition to this ability to bend, the tube must also be able to rigidify in order to stabilize itself during procedures, and apply the necessary forces with endoscopic tools.
This lead to the project of my fab Academy, that will be divided in 2 parts:
- The prototyping part: multiple prototypes will be produce during the fab academy journey and the best one will be selected. The goal will be to improve the way the pneumatic actuators are made, and maybe investigate the rigidification part if I have enough time.
- The test bench part: in order to chose the best prototype, I will developed a full test bench able to characterize my prototypes based on different properties.
Prototyping part¶
This part of the project consists in the development of the pneumatic actuators, i.e. the bending part of the endoscopic tube. This prototypes are made in silicone and embed 3 air channels for the multidirectionnal actuation.
The prototyping is divided in 2 parts:
- Improving the manufacturing of the pneumatic actuator.
- Try to add a rigidification system in the pneumatic actuator. This part will be investigate during some weeks of the fab academy, bt maybe not include in the final project as it is very exploratory and other parts of the project are more important.
Improving the manufacture¶
For the moment I have developped some basic mold to manufactur my pneumatic actuators that are made in silicone. However, some problems of reproducibility, ease of manufacture and efficiency remain in the process. I will use the skills develop in the fab acamdemy to make better pneumatic actuators.
Fab academy skills that will be used:
- CAD
- 3D printing (SLA and FDM)
- Molding and casting
Optionnaly - Rigidification system¶
As mentionned above, the rigidification of the endoscope tip is important to be able to apply enough force on the digestive tract wall during procedure.
Rigidification of the tube can be made by multiple way, but in this project, the layer jamming technique will be explored.
This technology is based on the superposition of multiple layers embeded in a membrane. In the basic state (state a on picture below), the layers are free to move, and the actuator is then in a low state of rigidity. When vacuum is applied inside the membrane (state b), atmospheric pressure will stuck the layers on each other and prevent them to move, the actuator rigidity will then be increased.
 source: Wanas
inghe et al. 2021
source: Wanas
inghe et al. 2021
At this stage my actuator prototype is capable of bending, but no rigidification system is include in it. The goal of this part of my project will be to include this system.
Fab academy skills that will be used:
- CAD
- Computer controlled cutting (laser cutter)
Note: as the development of the test bench (see below) and the actuators themselves is already a lot, I will maybe not do this part, it will depends on the time that I have left at the end of the project.
Test bench part¶
The bigger part of the project will be the development of a test bench to characterize the different prototypes designed and to select the best one.
It will be able to:
- control the pressure applied to each channel of the actuator, as well as to create vacuum in the layer jamming membrane;
- track the tip of the actuator in order to determine its flexion angle;
- monitor the force applied on the tip of the actuator;
- monitor the pressure inside the pressure channel with a user interface.
The test bench will thus be divided in multiple parts:
- An “actuation bloc” composed of a pump, the pressure regulator and the endoscopic actuator;
- A tracking motion system: I will use the commercial OptiTrack capture motion system, which uses camera and markers (that can be seen on the tip of my homemade actuator above);
- A force sensor: will be placed in the test bench in order to be in contact with the tip of the actuator;
- A mechanical structure to hold the endoscopic actuator, as well as the force sensor and the tracking motion system. This mechanical structure will be designed to be as modular as possible;
- finally, some presssure sensors to monitor the pressure inside the air chambers.

Fab academy skills that will be used:
- CAD
- 3D printing (FDM)
- Computer controlled cutting (laser cutter)
- Electronic production
- Use of input devices
- Interface and application programming
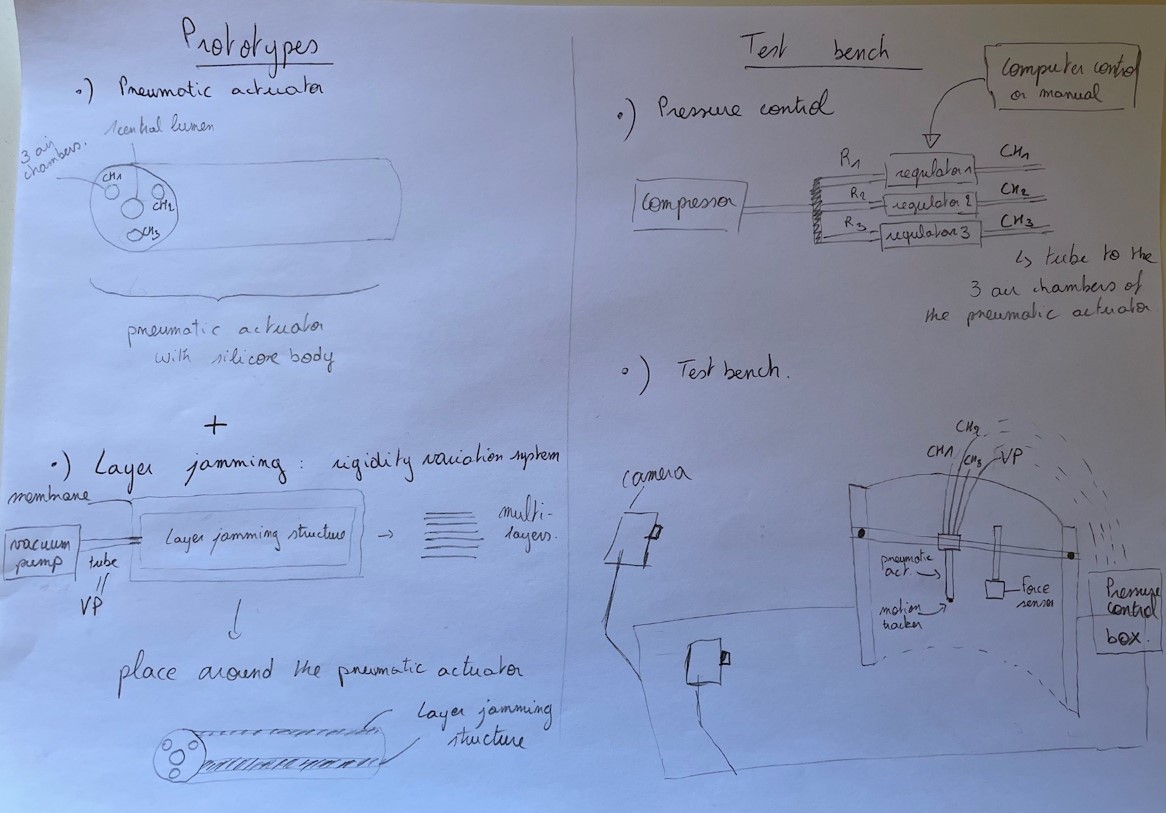
Overview¶
Here is a schematic of my final project, with the different element that it will include. The layer jamming part is an option.