ESP-32 Camera Facial Recognition
Assignment
For this week, I was assigned to measure something using a sensor and take readings from it.
Since my final project's input device is a camera, I decided to work with cameras for this week. Although my final project will perform OCR on a image taken by the camera, I wanted to use facial recognition technology (henceforth FRT) during this week because it seemed interesting.
Camera Board
We had ESP32 boards that were already available in the lab, however, those boards did not have hardware to support camera integration nor did they have a USB port. As such, I needed to buy a ESP-32 Camera Board specifically, instead of a general ESP32 board. I also needed a USB shield that would adapt the ESP32 Camera Board to a USB port that I could connect to my computer. The following image shows an ESP32 Camera Board with an OV2640 camera attached to it and is connected to a USB shield adapter.

The ESP32 board also comes with built-in WiFi connectivity which allows for remote access to the camera feed. This means that this camera can be deployed essentially off the shelf as a recording security camera, but for my purposes, I used this capability to be able to plug the board directly into a wall outlet and control the board from my computer which is connected to the same WiFi network.
Programming
I first installed Espressif's ESP32 board library in Arduino IDE. I also added the board (https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json) to Arduino IDE's Additional Boards Manager URLs menu under File -> Preferences -> Additional boards managers URLs.
After this, I selected the board under Tools -> Board.

After I connected to the board, I loaded the following program which would create a locally hosted web server that allows me to control the camera. The project template including all libraries and sub-classes can be found after installing and selecting the ESP32 Camera Board under File -> Examples -> ESP32 -> Camera -> CameraWebServer.
#include "esp_camera.h"
#include <WiFi.h>
#define CAMERA_MODEL_AI_THINKER // Has PSRAM
#include "camera_pins.h"
const char* ssid = "REDACTED";
const char* password = "REDACTED";
void startCameraServer();
void setupLedFlash(int pin);
void setup() {
pinMode(2, OUTPUT);
Serial.begin(9600);
while(!Serial);
Serial.setDebugOutput(true);
Serial.println();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.frame_size = FRAMESIZE_UXGA;
config.pixel_format = PIXFORMAT_JPEG; // for streaming
//config.pixel_format = PIXFORMAT_RGB565; // for face detection/recognition
config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
config.fb_location = CAMERA_FB_IN_PSRAM;
config.jpeg_quality = 12;
config.fb_count = 1;
// if PSRAM IC present, init with UXGA resolution and higher JPEG quality
// for larger pre-allocated frame buffer.
if(config.pixel_format == PIXFORMAT_JPEG){
if(psramFound()){
config.jpeg_quality = 10;
config.fb_count = 2;
config.grab_mode = CAMERA_GRAB_LATEST;
} else {
// Limit the frame size when PSRAM is not available
config.frame_size = FRAMESIZE_SVGA;
config.fb_location = CAMERA_FB_IN_DRAM;
}
} else {
// Best option for face detection/recognition
config.frame_size = FRAMESIZE_240X240;
#if CONFIG_IDF_TARGET_ESP32S3
config.fb_count = 2;
#endif
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
sensor_t * s = esp_camera_sensor_get();
// initial sensors are flipped vertically and colors are a bit saturated
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1); // flip it back
s->set_brightness(s, 1); // up the brightness just a bit
s->set_saturation(s, -2); // lower the saturation
}
// drop down frame size for higher initial frame rate
if(config.pixel_format == PIXFORMAT_JPEG){
s->set_framesize(s, FRAMESIZE_QVGA);
}
// Setup LED FLash if LED pin is defined in camera_pins.h
#if defined(LED_GPIO_NUM)
setupLedFlash(LED_GPIO_NUM);
#endif
WiFi.begin(ssid, password);
WiFi.setSleep(false);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
startCameraServer();
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.localIP());
Serial.println("' to connect");
}
void loop() {
// Do nothing. Everything is done in another task by the web server
delay(10000);
}
While the entire project contains other library and control files, this program acts as the Command pattern. All files can be downloaded under this week's file download.
When uploading the code successfully to the ESP32 Cam board and executing it, the following message is printed to the Serial monitor.
WiFi connected
Camera Ready! Use 'http://10.12.28.193' to connectUpon connecting to the local address of 10.12.28.193, I access a local web server that allows me to control the camera and view the live feed. The main functions available on this page are to:
- Configure camera resolution
- Save a picture from current camera feed
- Start and stop camera feed - this function is necessary to initialize the feed when starting up the camera and server for the first time, along with allowing me to reboot the camera in case of any issues.
- Configure facial detection
- Configure facial recognition

I then turned on the FRT settings. When a face is detected, a yellow box with nodes is displayed on the camera feed.

The logic for recognizing faces comes in a library and I was very hesitant to modify it. However, I knew that every time a face was recognized, there was some sort of function call to overlay the yellow box over the camera feed. I knew that this job would be under the app_httpd.cpp file as that file handled everything in the web server. The entirety of the web server program is shown under the collapsible as it is quite long.
app_httpd.cpp
#include "esp_http_server.h"
#include "esp_timer.h"
#include "esp_camera.h"
#include "img_converters.h"
#include "fb_gfx.h"
#include "esp32-hal-ledc.h"
#include "sdkconfig.h"
#include "camera_index.h"
#include "Arduino.h"
#define LED_PIN 4
#if defined(ARDUINO_ARCH_ESP32) && defined(CONFIG_ARDUHAL_ESP_LOG)
#include "esp32-hal-log.h"
#endif
#ifdef BOARD_HAS_PSRAM
#define CONFIG_ESP_FACE_DETECT_ENABLED 1
#if CONFIG_IDF_TARGET_ESP32S3
#define CONFIG_ESP_FACE_RECOGNITION_ENABLED 1
#else
#define CONFIG_ESP_FACE_RECOGNITION_ENABLED 0
#endif
#else
#define CONFIG_ESP_FACE_DETECT_ENABLED 0
#define CONFIG_ESP_FACE_RECOGNITION_ENABLED 0
#endif
#if CONFIG_ESP_FACE_DETECT_ENABLED
#include
#include "human_face_detect_msr01.hpp"
#include "human_face_detect_mnp01.hpp"
#define TWO_STAGE 1
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
#pragma GCC diagnostic ignored "-Wformat"
#pragma GCC diagnostic ignored "-Wstrict-aliasing"
#include "face_recognition_tool.hpp"
#include "face_recognition_112_v1_s16.hpp"
#include "face_recognition_112_v1_s8.hpp"
#pragma GCC diagnostic error "-Wformat"
#pragma GCC diagnostic warning "-Wstrict-aliasing"
#define QUANT_TYPE 0
#define FACE_ID_SAVE_NUMBER 7
#endif
#define FACE_COLOR_WHITE 0x00FFFFFF
#define FACE_COLOR_BLACK 0x00000000
#define FACE_COLOR_RED 0x000000FF
#define FACE_COLOR_GREEN 0x0000FF00
#define FACE_COLOR_BLUE 0x00FF0000
#define FACE_COLOR_YELLOW (FACE_COLOR_RED | FACE_COLOR_GREEN)
#define FACE_COLOR_CYAN (FACE_COLOR_BLUE | FACE_COLOR_GREEN)
#define FACE_COLOR_PURPLE (FACE_COLOR_BLUE | FACE_COLOR_RED)
#endif
#define CONFIG_LED_ILLUMINATOR_ENABLED 1
#if CONFIG_LED_ILLUMINATOR_ENABLED
#define LED_LEDC_GPIO 22 //configure LED pin
#define CONFIG_LED_MAX_INTENSITY 255
int led_duty = 0;
bool isStreaming = false;
#endif
typedef struct
{
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
#define PART_BOUNDARY "123456789000000000000987654321"
static const char *_STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char *_STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char *_STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\nX-Timestamp: %d.%06d\r\n\r\n";
httpd_handle_t stream_httpd = NULL;
httpd_handle_t camera_httpd = NULL;
#if CONFIG_ESP_FACE_DETECT_ENABLED
static int8_t detection_enabled = 0;
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
static int8_t recognition_enabled = 0;
static int8_t is_enrolling = 0;
#if QUANT_TYPE
// S16 model
FaceRecognition112V1S16 recognizer;
#else
// S8 model
FaceRecognition112V1S8 recognizer;
#endif
#endif
#endif
typedef struct
{
size_t size; //number of values used for filtering
size_t index; //current value index
size_t count; //value count
int sum;
int *values; //array to be filled with values
} ra_filter_t;
static ra_filter_t ra_filter;
static ra_filter_t *ra_filter_init(ra_filter_t *filter, size_t sample_size)
{
memset(filter, 0, sizeof(ra_filter_t));
filter->values = (int *)malloc(sample_size * sizeof(int));
if (!filter->values)
{
return NULL;
}
memset(filter->values, 0, sample_size * sizeof(int));
filter->size = sample_size;
return filter;
}
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
static int ra_filter_run(ra_filter_t *filter, int value)
{
if (!filter->values)
{
return value;
}
filter->sum -= filter->values[filter->index];
filter->values[filter->index] = value;
filter->sum += filter->values[filter->index];
filter->index++;
filter->index = filter->index % filter->size;
if (filter->count < filter->size)
{
filter->count++;
}
return filter->sum / filter->count;
}
#endif
#if CONFIG_ESP_FACE_DETECT_ENABLED
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
static void rgb_print(fb_data_t *fb, uint32_t color, const char *str)
{
fb_gfx_print(fb, (fb->width - (strlen(str) * 14)) / 2, 10, color, str);
}
static int rgb_printf(fb_data_t *fb, uint32_t color, const char *format, ...)
{
char loc_buf[64];
char *temp = loc_buf;
int len;
va_list arg;
va_list copy;
va_start(arg, format);
va_copy(copy, arg);
len = vsnprintf(loc_buf, sizeof(loc_buf), format, arg);
va_end(copy);
if (len >= sizeof(loc_buf))
{
temp = (char *)malloc(len + 1);
if (temp == NULL)
{
return 0;
}
}
vsnprintf(temp, len + 1, format, arg);
va_end(arg);
rgb_print(fb, color, temp);
if (len > 64)
{
free(temp);
}
return len;
}
#endif
static void draw_face_boxes(fb_data_t *fb, std::list *results, int face_id)
{
Serial.println("FACE DETECTED");
digitalWrite(2, HIGH); // turn the LED on (HIGH is the voltage level)
delay(2500); // wait for a second
digitalWrite(2, LOW); // turn the LED off by making the voltage LOW
int x, y, w, h;
uint32_t color = FACE_COLOR_YELLOW;
if (face_id < 0)
{
color = FACE_COLOR_RED;
}
else if (face_id > 0)
{
color = FACE_COLOR_GREEN;
}
if(fb->bytes_per_pixel == 2){
//color = ((color >> 8) & 0xF800) | ((color >> 3) & 0x07E0) | (color & 0x001F);
color = ((color >> 16) & 0x001F) | ((color >> 3) & 0x07E0) | ((color << 8) & 0xF800);
}
int i = 0;
for (std::list::iterator prediction = results->begin(); prediction != results->end(); prediction++, i++)
{
// rectangle box
x = (int)prediction->box[0];
y = (int)prediction->box[1];
w = (int)prediction->box[2] - x + 1;
h = (int)prediction->box[3] - y + 1;
if((x + w) > fb->width){
w = fb->width - x;
}
if((y + h) > fb->height){
h = fb->height - y;
}
fb_gfx_drawFastHLine(fb, x, y, w, color);
fb_gfx_drawFastHLine(fb, x, y + h - 1, w, color);
fb_gfx_drawFastVLine(fb, x, y, h, color);
fb_gfx_drawFastVLine(fb, x + w - 1, y, h, color);
#if TWO_STAGE
// landmarks (left eye, mouth left, nose, right eye, mouth right)
int x0, y0, j;
for (j = 0; j < 10; j+=2) {
x0 = (int)prediction->keypoint[j];
y0 = (int)prediction->keypoint[j+1];
fb_gfx_fillRect(fb, x0, y0, 3, 3, color);
}
#endif
}
}
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
static int run_face_recognition(fb_data_t *fb, std::list *results)
{
std::vector landmarks = results->front().keypoint;
int id = -1;
Tensor tensor;
tensor.set_element((uint8_t *)fb->data).set_shape({fb->height, fb->width, 3}).set_auto_free(false);
int enrolled_count = recognizer.get_enrolled_id_num();
if (enrolled_count < FACE_ID_SAVE_NUMBER && is_enrolling){
id = recognizer.enroll_id(tensor, landmarks, "", true);
log_i("Enrolled ID: %d", id);
rgb_printf(fb, FACE_COLOR_CYAN, "ID[%u]", id);
}
face_info_t recognize = recognizer.recognize(tensor, landmarks);
if(recognize.id >= 0){
rgb_printf(fb, FACE_COLOR_GREEN, "ID[%u]: %.2f", recognize.id, recognize.similarity);
} else {
rgb_print(fb, FACE_COLOR_RED, "Intruder Alert!");
}
return recognize.id;
}
#endif
#endif
#if CONFIG_LED_ILLUMINATOR_ENABLED
void enable_led(bool en)
{ // Turn LED On or Off
int duty = en ? led_duty : 0;
if (en && isStreaming && (led_duty > CONFIG_LED_MAX_INTENSITY))
{
duty = CONFIG_LED_MAX_INTENSITY;
}
ledcWrite(LED_LEDC_GPIO, duty);
//ledc_set_duty(CONFIG_LED_LEDC_SPEED_MODE, CONFIG_LED_LEDC_CHANNEL, duty);
//ledc_update_duty(CONFIG_LED_LEDC_SPEED_MODE, CONFIG_LED_LEDC_CHANNEL);
log_i("Set LED intensity to %d", duty);
}
#endif
static esp_err_t bmp_handler(httpd_req_t *req)
{
camera_fb_t *fb = NULL;
esp_err_t res = ESP_OK;
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
uint64_t fr_start = esp_timer_get_time();
#endif
fb = esp_camera_fb_get();
if (!fb)
{
log_e("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/x-windows-bmp");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.bmp");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
char ts[32];
snprintf(ts, 32, "%lld.%06ld", fb->timestamp.tv_sec, fb->timestamp.tv_usec);
httpd_resp_set_hdr(req, "X-Timestamp", (const char *)ts);
uint8_t * buf = NULL;
size_t buf_len = 0;
bool converted = frame2bmp(fb, &buf, &buf_len);
esp_camera_fb_return(fb);
if(!converted){
log_e("BMP Conversion failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
res = httpd_resp_send(req, (const char *)buf, buf_len);
free(buf);
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
uint64_t fr_end = esp_timer_get_time();
#endif
log_i("BMP: %llums, %uB", (uint64_t)((fr_end - fr_start) / 1000), buf_len);
return res;
}
static size_t jpg_encode_stream(void *arg, size_t index, const void *data, size_t len)
{
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if (!index)
{
j->len = 0;
}
if (httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK)
{
return 0;
}
j->len += len;
return len;
}
static esp_err_t capture_handler(httpd_req_t *req)
{
camera_fb_t *fb = NULL;
esp_err_t res = ESP_OK;
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
int64_t fr_start = esp_timer_get_time();
#endif
#if CONFIG_LED_ILLUMINATOR_ENABLED
enable_led(true);
vTaskDelay(150 / portTICK_PERIOD_MS); // The LED needs to be turned on ~150ms before the call to esp_camera_fb_get()
fb = esp_camera_fb_get(); // or it won't be visible in the frame. A better way to do this is needed.
enable_led(false);
#else
fb = esp_camera_fb_get();
#endif
if (!fb)
{
log_e("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/jpeg");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
char ts[32];
snprintf(ts, 32, "%lld.%06ld", fb->timestamp.tv_sec, fb->timestamp.tv_usec);
httpd_resp_set_hdr(req, "X-Timestamp", (const char *)ts);
#if CONFIG_ESP_FACE_DETECT_ENABLED
size_t out_len, out_width, out_height;
uint8_t *out_buf;
bool s;
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
bool detected = false;
#endif
int face_id = 0;
if (!detection_enabled || fb->width > 400)
{
#endif
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
size_t fb_len = 0;
#endif
if (fb->format == PIXFORMAT_JPEG)
{
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fb_len = fb->len;
#endif
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
}
else
{
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk) ? ESP_OK : ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fb_len = jchunk.len;
#endif
}
esp_camera_fb_return(fb);
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
int64_t fr_end = esp_timer_get_time();
#endif
log_i("JPG: %uB %ums", (uint32_t)(fb_len), (uint32_t)((fr_end - fr_start) / 1000));
return res;
#if CONFIG_ESP_FACE_DETECT_ENABLED
}
jpg_chunking_t jchunk = {req, 0};
if (fb->format == PIXFORMAT_RGB565
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
&& !recognition_enabled
#endif
){
#if TWO_STAGE
HumanFaceDetectMSR01 s1(0.1F, 0.5F, 10, 0.2F);
HumanFaceDetectMNP01 s2(0.5F, 0.3F, 5);
std::list &candidates = s1.infer((uint16_t *)fb->buf, {(int)fb->height, (int)fb->width, 3});
std::list &results = s2.infer((uint16_t *)fb->buf, {(int)fb->height, (int)fb->width, 3}, candidates);
#else
HumanFaceDetectMSR01 s1(0.3F, 0.5F, 10, 0.2F);
std::list &results = s1.infer((uint16_t *)fb->buf, {(int)fb->height, (int)fb->width, 3});
#endif
if (results.size() > 0) {
fb_data_t rfb;
rfb.width = fb->width;
rfb.height = fb->height;
rfb.data = fb->buf;
rfb.bytes_per_pixel = 2;
rfb.format = FB_RGB565;
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
detected = true;
#endif
draw_face_boxes(&rfb, &results, face_id);
}
s = fmt2jpg_cb(fb->buf, fb->len, fb->width, fb->height, PIXFORMAT_RGB565, 90, jpg_encode_stream, &jchunk);
esp_camera_fb_return(fb);
} else
{
out_len = fb->width * fb->height * 3;
out_width = fb->width;
out_height = fb->height;
out_buf = (uint8_t*)malloc(out_len);
if (!out_buf) {
log_e("out_buf malloc failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
s = fmt2rgb888(fb->buf, fb->len, fb->format, out_buf);
esp_camera_fb_return(fb);
if (!s) {
free(out_buf);
log_e("To rgb888 failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
fb_data_t rfb;
rfb.width = out_width;
rfb.height = out_height;
rfb.data = out_buf;
rfb.bytes_per_pixel = 3;
rfb.format = FB_BGR888;
#if TWO_STAGE
HumanFaceDetectMSR01 s1(0.1F, 0.5F, 10, 0.2F);
HumanFaceDetectMNP01 s2(0.5F, 0.3F, 5);
std::list &candidates = s1.infer((uint8_t *)out_buf, {(int)out_height, (int)out_width, 3});
std::list &results = s2.infer((uint8_t *)out_buf, {(int)out_height, (int)out_width, 3}, candidates);
#else
HumanFaceDetectMSR01 s1(0.3F, 0.5F, 10, 0.2F);
std::list &results = s1.infer((uint8_t *)out_buf, {(int)out_height, (int)out_width, 3});
#endif
if (results.size() > 0) {
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
detected = true;
#endif
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
if (recognition_enabled) {
face_id = run_face_recognition(&rfb, &results);
}
#endif
draw_face_boxes(&rfb, &results, face_id);
}
s = fmt2jpg_cb(out_buf, out_len, out_width, out_height, PIXFORMAT_RGB888, 90, jpg_encode_stream, &jchunk);
free(out_buf);
}
if (!s) {
log_e("JPEG compression failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
int64_t fr_end = esp_timer_get_time();
#endif
log_i("FACE: %uB %ums %s%d", (uint32_t)(jchunk.len), (uint32_t)((fr_end - fr_start) / 1000), detected ? "DETECTED " : "", face_id);
return res;
#endif
}
static esp_err_t stream_handler(httpd_req_t *req)
{
camera_fb_t *fb = NULL;
struct timeval _timestamp;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t *_jpg_buf = NULL;
char *part_buf[128];
#if CONFIG_ESP_FACE_DETECT_ENABLED
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
bool detected = false;
int64_t fr_ready = 0;
int64_t fr_recognize = 0;
int64_t fr_encode = 0;
int64_t fr_face = 0;
int64_t fr_start = 0;
#endif
int face_id = 0;
size_t out_len = 0, out_width = 0, out_height = 0;
uint8_t *out_buf = NULL;
bool s = false;
#if TWO_STAGE
HumanFaceDetectMSR01 s1(0.1F, 0.5F, 10, 0.2F);
HumanFaceDetectMNP01 s2(0.5F, 0.3F, 5);
#else
HumanFaceDetectMSR01 s1(0.3F, 0.5F, 10, 0.2F);
#endif
#endif
static int64_t last_frame = 0;
if (!last_frame)
{
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if (res != ESP_OK)
{
return res;
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
httpd_resp_set_hdr(req, "X-Framerate", "60");
#if CONFIG_LED_ILLUMINATOR_ENABLED
isStreaming = true;
enable_led(true);
#endif
while (true)
{
#if CONFIG_ESP_FACE_DETECT_ENABLED
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
detected = false;
#endif
face_id = 0;
#endif
fb = esp_camera_fb_get();
if (!fb)
{
log_e("Camera capture failed");
res = ESP_FAIL;
}
else
{
_timestamp.tv_sec = fb->timestamp.tv_sec;
_timestamp.tv_usec = fb->timestamp.tv_usec;
#if CONFIG_ESP_FACE_DETECT_ENABLED
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_start = esp_timer_get_time();
fr_ready = fr_start;
fr_encode = fr_start;
fr_recognize = fr_start;
fr_face = fr_start;
#endif
if (!detection_enabled || fb->width > 400)
{
#endif
if (fb->format != PIXFORMAT_JPEG)
{
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if (!jpeg_converted)
{
log_e("JPEG compression failed");
res = ESP_FAIL;
}
}
else
{
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
#if CONFIG_ESP_FACE_DETECT_ENABLED
}
else
{
if (fb->format == PIXFORMAT_RGB565
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
&& !recognition_enabled
#endif
){
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_ready = esp_timer_get_time();
#endif
#if TWO_STAGE
std::list &candidates = s1.infer((uint16_t *)fb->buf, {(int)fb->height, (int)fb->width, 3});
std::list &results = s2.infer((uint16_t *)fb->buf, {(int)fb->height, (int)fb->width, 3}, candidates);
#else
std::list &results = s1.infer((uint16_t *)fb->buf, {(int)fb->height, (int)fb->width, 3});
#endif
#if CONFIG_ESP_FACE_DETECT_ENABLED && ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_face = esp_timer_get_time();
fr_recognize = fr_face;
#endif
if (results.size() > 0) {
fb_data_t rfb;
rfb.width = fb->width;
rfb.height = fb->height;
rfb.data = fb->buf;
rfb.bytes_per_pixel = 2;
rfb.format = FB_RGB565;
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
detected = true;
#endif
draw_face_boxes(&rfb, &results, face_id);
}
s = fmt2jpg(fb->buf, fb->len, fb->width, fb->height, PIXFORMAT_RGB565, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if (!s) {
log_e("fmt2jpg failed");
res = ESP_FAIL;
}
#if CONFIG_ESP_FACE_DETECT_ENABLED && ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_encode = esp_timer_get_time();
#endif
} else
{
out_len = fb->width * fb->height * 3;
out_width = fb->width;
out_height = fb->height;
out_buf = (uint8_t*)malloc(out_len);
if (!out_buf) {
log_e("out_buf malloc failed");
res = ESP_FAIL;
} else {
s = fmt2rgb888(fb->buf, fb->len, fb->format, out_buf);
esp_camera_fb_return(fb);
fb = NULL;
if (!s) {
free(out_buf);
log_e("To rgb888 failed");
res = ESP_FAIL;
} else {
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_ready = esp_timer_get_time();
#endif
fb_data_t rfb;
rfb.width = out_width;
rfb.height = out_height;
rfb.data = out_buf;
rfb.bytes_per_pixel = 3;
rfb.format = FB_BGR888;
#if TWO_STAGE
std::list &candidates = s1.infer((uint8_t *)out_buf, {(int)out_height, (int)out_width, 3});
std::list &results = s2.infer((uint8_t *)out_buf, {(int)out_height, (int)out_width, 3}, candidates);
#else
std::list &results = s1.infer((uint8_t *)out_buf, {(int)out_height, (int)out_width, 3});
#endif
#if CONFIG_ESP_FACE_DETECT_ENABLED && ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_face = esp_timer_get_time();
fr_recognize = fr_face;
#endif
if (results.size() > 0) {
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
detected = true;
#endif
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
if (recognition_enabled) {
face_id = run_face_recognition(&rfb, &results);
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_recognize = esp_timer_get_time();
#endif
}
#endif
draw_face_boxes(&rfb, &results, face_id);
}
s = fmt2jpg(out_buf, out_len, out_width, out_height, PIXFORMAT_RGB888, 90, &_jpg_buf, &_jpg_buf_len);
free(out_buf);
if (!s) {
log_e("fmt2jpg failed");
res = ESP_FAIL;
}
#if CONFIG_ESP_FACE_DETECT_ENABLED && ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
fr_encode = esp_timer_get_time();
#endif
}
}
}
}
#endif
}
if (res == ESP_OK)
{
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if (res == ESP_OK)
{
size_t hlen = snprintf((char *)part_buf, 128, _STREAM_PART, _jpg_buf_len, _timestamp.tv_sec, _timestamp.tv_usec);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if (res == ESP_OK)
{
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if (fb)
{
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
}
else if (_jpg_buf)
{
free(_jpg_buf);
_jpg_buf = NULL;
}
if (res != ESP_OK)
{
log_e("Send frame failed");
break;
}
int64_t fr_end = esp_timer_get_time();
#if CONFIG_ESP_FACE_DETECT_ENABLED && ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
int64_t ready_time = (fr_ready - fr_start) / 1000;
int64_t face_time = (fr_face - fr_ready) / 1000;
int64_t recognize_time = (fr_recognize - fr_face) / 1000;
int64_t encode_time = (fr_encode - fr_recognize) / 1000;
int64_t process_time = (fr_encode - fr_start) / 1000;
#endif
int64_t frame_time = fr_end - last_frame;
frame_time /= 1000;
#if ARDUHAL_LOG_LEVEL >= ARDUHAL_LOG_LEVEL_INFO
uint32_t avg_frame_time = ra_filter_run(&ra_filter, frame_time);
#endif
log_i("MJPG: %uB %ums (%.1ffps), AVG: %ums (%.1ffps)"
#if CONFIG_ESP_FACE_DETECT_ENABLED
", %u+%u+%u+%u=%u %s%d"
#endif
,
(uint32_t)(_jpg_buf_len),
(uint32_t)frame_time, 1000.0 / (uint32_t)frame_time,
avg_frame_time, 1000.0 / avg_frame_time
#if CONFIG_ESP_FACE_DETECT_ENABLED
,
(uint32_t)ready_time, (uint32_t)face_time, (uint32_t)recognize_time, (uint32_t)encode_time, (uint32_t)process_time,
(detected) ? "DETECTED " : "", face_id
#endif
);
}
#if CONFIG_LED_ILLUMINATOR_ENABLED
isStreaming = false;
enable_led(false);
#endif
return res;
}
static esp_err_t parse_get(httpd_req_t *req, char **obuf)
{
char *buf = NULL;
size_t buf_len = 0;
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char *)malloc(buf_len);
if (!buf) {
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
*obuf = buf;
return ESP_OK;
}
free(buf);
}
httpd_resp_send_404(req);
return ESP_FAIL;
}
static esp_err_t cmd_handler(httpd_req_t *req)
{
char *buf = NULL;
char variable[32];
char value[32];
if (parse_get(req, &buf) != ESP_OK) {
return ESP_FAIL;
}
if (httpd_query_key_value(buf, "var", variable, sizeof(variable)) != ESP_OK ||
httpd_query_key_value(buf, "val", value, sizeof(value)) != ESP_OK) {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
int val = atoi(value);
log_i("%s = %d", variable, val);
sensor_t *s = esp_camera_sensor_get();
int res = 0;
if (!strcmp(variable, "framesize")) {
if (s->pixformat == PIXFORMAT_JPEG) {
res = s->set_framesize(s, (framesize_t)val);
}
}
else if (!strcmp(variable, "quality"))
res = s->set_quality(s, val);
else if (!strcmp(variable, "contrast"))
res = s->set_contrast(s, val);
else if (!strcmp(variable, "brightness"))
res = s->set_brightness(s, val);
else if (!strcmp(variable, "saturation"))
res = s->set_saturation(s, val);
else if (!strcmp(variable, "gainceiling"))
res = s->set_gainceiling(s, (gainceiling_t)val);
else if (!strcmp(variable, "colorbar"))
res = s->set_colorbar(s, val);
else if (!strcmp(variable, "awb"))
res = s->set_whitebal(s, val);
else if (!strcmp(variable, "agc"))
res = s->set_gain_ctrl(s, val);
else if (!strcmp(variable, "aec"))
res = s->set_exposure_ctrl(s, val);
else if (!strcmp(variable, "hmirror"))
res = s->set_hmirror(s, val);
else if (!strcmp(variable, "vflip"))
res = s->set_vflip(s, val);
else if (!strcmp(variable, "awb_gain"))
res = s->set_awb_gain(s, val);
else if (!strcmp(variable, "agc_gain"))
res = s->set_agc_gain(s, val);
else if (!strcmp(variable, "aec_value"))
res = s->set_aec_value(s, val);
else if (!strcmp(variable, "aec2"))
res = s->set_aec2(s, val);
else if (!strcmp(variable, "dcw"))
res = s->set_dcw(s, val);
else if (!strcmp(variable, "bpc"))
res = s->set_bpc(s, val);
else if (!strcmp(variable, "wpc"))
res = s->set_wpc(s, val);
else if (!strcmp(variable, "raw_gma"))
res = s->set_raw_gma(s, val);
else if (!strcmp(variable, "lenc"))
res = s->set_lenc(s, val);
else if (!strcmp(variable, "special_effect"))
res = s->set_special_effect(s, val);
else if (!strcmp(variable, "wb_mode"))
res = s->set_wb_mode(s, val);
else if (!strcmp(variable, "ae_level"))
res = s->set_ae_level(s, val);
#if CONFIG_LED_ILLUMINATOR_ENABLED
else if (!strcmp(variable, "led_intensity")) {
led_duty = val;
if (isStreaming)
enable_led(true);
}
#endif
#if CONFIG_ESP_FACE_DETECT_ENABLED
else if (!strcmp(variable, "face_detect")) {
detection_enabled = val;
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
if (!detection_enabled) {
recognition_enabled = 0;
}
#endif
}
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
else if (!strcmp(variable, "face_enroll")){
is_enrolling = !is_enrolling;
log_i("Enrolling: %s", is_enrolling?"true":"false");
}
else if (!strcmp(variable, "face_recognize")) {
recognition_enabled = val;
if (recognition_enabled) {
detection_enabled = val;
}
}
#endif
#endif
else {
log_i("Unknown command: %s", variable);
res = -1;
}
if (res < 0) {
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static int print_reg(char * p, sensor_t * s, uint16_t reg, uint32_t mask){
return sprintf(p, "\"0x%x\":%u,", reg, s->get_reg(s, reg, mask));
}
static esp_err_t status_handler(httpd_req_t *req)
{
static char json_response[1024];
sensor_t *s = esp_camera_sensor_get();
char *p = json_response;
*p++ = '{';
if(s->id.PID == OV5640_PID || s->id.PID == OV3660_PID){
for(int reg = 0x3400; reg < 0x3406; reg+=2){
p+=print_reg(p, s, reg, 0xFFF);//12 bit
}
p+=print_reg(p, s, 0x3406, 0xFF);
p+=print_reg(p, s, 0x3500, 0xFFFF0);//16 bit
p+=print_reg(p, s, 0x3503, 0xFF);
p+=print_reg(p, s, 0x350a, 0x3FF);//10 bit
p+=print_reg(p, s, 0x350c, 0xFFFF);//16 bit
for(int reg = 0x5480; reg <= 0x5490; reg++){
p+=print_reg(p, s, reg, 0xFF);
}
for(int reg = 0x5380; reg <= 0x538b; reg++){
p+=print_reg(p, s, reg, 0xFF);
}
for(int reg = 0x5580; reg < 0x558a; reg++){
p+=print_reg(p, s, reg, 0xFF);
}
p+=print_reg(p, s, 0x558a, 0x1FF);//9 bit
} else if(s->id.PID == OV2640_PID){
p+=print_reg(p, s, 0xd3, 0xFF);
p+=print_reg(p, s, 0x111, 0xFF);
p+=print_reg(p, s, 0x132, 0xFF);
}
p += sprintf(p, "\"xclk\":%u,", s->xclk_freq_hz / 1000000);
p += sprintf(p, "\"pixformat\":%u,", s->pixformat);
p += sprintf(p, "\"framesize\":%u,", s->status.framesize);
p += sprintf(p, "\"quality\":%u,", s->status.quality);
p += sprintf(p, "\"brightness\":%d,", s->status.brightness);
p += sprintf(p, "\"contrast\":%d,", s->status.contrast);
p += sprintf(p, "\"saturation\":%d,", s->status.saturation);
p += sprintf(p, "\"sharpness\":%d,", s->status.sharpness);
p += sprintf(p, "\"special_effect\":%u,", s->status.special_effect);
p += sprintf(p, "\"wb_mode\":%u,", s->status.wb_mode);
p += sprintf(p, "\"awb\":%u,", s->status.awb);
p += sprintf(p, "\"awb_gain\":%u,", s->status.awb_gain);
p += sprintf(p, "\"aec\":%u,", s->status.aec);
p += sprintf(p, "\"aec2\":%u,", s->status.aec2);
p += sprintf(p, "\"ae_level\":%d,", s->status.ae_level);
p += sprintf(p, "\"aec_value\":%u,", s->status.aec_value);
p += sprintf(p, "\"agc\":%u,", s->status.agc);
p += sprintf(p, "\"agc_gain\":%u,", s->status.agc_gain);
p += sprintf(p, "\"gainceiling\":%u,", s->status.gainceiling);
p += sprintf(p, "\"bpc\":%u,", s->status.bpc);
p += sprintf(p, "\"wpc\":%u,", s->status.wpc);
p += sprintf(p, "\"raw_gma\":%u,", s->status.raw_gma);
p += sprintf(p, "\"lenc\":%u,", s->status.lenc);
p += sprintf(p, "\"hmirror\":%u,", s->status.hmirror);
p += sprintf(p, "\"dcw\":%u,", s->status.dcw);
p += sprintf(p, "\"colorbar\":%u", s->status.colorbar);
#if CONFIG_LED_ILLUMINATOR_ENABLED
p += sprintf(p, ",\"led_intensity\":%u", led_duty);
#else
p += sprintf(p, ",\"led_intensity\":%d", -1);
#endif
#if CONFIG_ESP_FACE_DETECT_ENABLED
p += sprintf(p, ",\"face_detect\":%u", detection_enabled);
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
p += sprintf(p, ",\"face_enroll\":%u,", is_enrolling);
p += sprintf(p, "\"face_recognize\":%u", recognition_enabled);
#endif
#endif
*p++ = '}';
*p++ = 0;
httpd_resp_set_type(req, "application/json");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, json_response, strlen(json_response));
}
static esp_err_t xclk_handler(httpd_req_t *req)
{
char *buf = NULL;
char _xclk[32];
if (parse_get(req, &buf) != ESP_OK) {
return ESP_FAIL;
}
if (httpd_query_key_value(buf, "xclk", _xclk, sizeof(_xclk)) != ESP_OK) {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
int xclk = atoi(_xclk);
log_i("Set XCLK: %d MHz", xclk);
sensor_t *s = esp_camera_sensor_get();
int res = s->set_xclk(s, LEDC_TIMER_0, xclk);
if (res) {
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t reg_handler(httpd_req_t *req)
{
char *buf = NULL;
char _reg[32];
char _mask[32];
char _val[32];
if (parse_get(req, &buf) != ESP_OK) {
return ESP_FAIL;
}
if (httpd_query_key_value(buf, "reg", _reg, sizeof(_reg)) != ESP_OK ||
httpd_query_key_value(buf, "mask", _mask, sizeof(_mask)) != ESP_OK ||
httpd_query_key_value(buf, "val", _val, sizeof(_val)) != ESP_OK) {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
int reg = atoi(_reg);
int mask = atoi(_mask);
int val = atoi(_val);
log_i("Set Register: reg: 0x%02x, mask: 0x%02x, value: 0x%02x", reg, mask, val);
sensor_t *s = esp_camera_sensor_get();
int res = s->set_reg(s, reg, mask, val);
if (res) {
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t greg_handler(httpd_req_t *req)
{
char *buf = NULL;
char _reg[32];
char _mask[32];
if (parse_get(req, &buf) != ESP_OK) {
return ESP_FAIL;
}
if (httpd_query_key_value(buf, "reg", _reg, sizeof(_reg)) != ESP_OK ||
httpd_query_key_value(buf, "mask", _mask, sizeof(_mask)) != ESP_OK) {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
int reg = atoi(_reg);
int mask = atoi(_mask);
sensor_t *s = esp_camera_sensor_get();
int res = s->get_reg(s, reg, mask);
if (res < 0) {
return httpd_resp_send_500(req);
}
log_i("Get Register: reg: 0x%02x, mask: 0x%02x, value: 0x%02x", reg, mask, res);
char buffer[20];
const char * val = itoa(res, buffer, 10);
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, val, strlen(val));
}
static int parse_get_var(char *buf, const char * key, int def)
{
char _int[16];
if(httpd_query_key_value(buf, key, _int, sizeof(_int)) != ESP_OK){
return def;
}
return atoi(_int);
}
static esp_err_t pll_handler(httpd_req_t *req)
{
char *buf = NULL;
if (parse_get(req, &buf) != ESP_OK) {
return ESP_FAIL;
}
int bypass = parse_get_var(buf, "bypass", 0);
int mul = parse_get_var(buf, "mul", 0);
int sys = parse_get_var(buf, "sys", 0);
int root = parse_get_var(buf, "root", 0);
int pre = parse_get_var(buf, "pre", 0);
int seld5 = parse_get_var(buf, "seld5", 0);
int pclken = parse_get_var(buf, "pclken", 0);
int pclk = parse_get_var(buf, "pclk", 0);
free(buf);
log_i("Set Pll: bypass: %d, mul: %d, sys: %d, root: %d, pre: %d, seld5: %d, pclken: %d, pclk: %d", bypass, mul, sys, root, pre, seld5, pclken, pclk);
sensor_t *s = esp_camera_sensor_get();
int res = s->set_pll(s, bypass, mul, sys, root, pre, seld5, pclken, pclk);
if (res) {
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t win_handler(httpd_req_t *req)
{
char *buf = NULL;
if (parse_get(req, &buf) != ESP_OK) {
return ESP_FAIL;
}
int startX = parse_get_var(buf, "sx", 0);
int startY = parse_get_var(buf, "sy", 0);
int endX = parse_get_var(buf, "ex", 0);
int endY = parse_get_var(buf, "ey", 0);
int offsetX = parse_get_var(buf, "offx", 0);
int offsetY = parse_get_var(buf, "offy", 0);
int totalX = parse_get_var(buf, "tx", 0);
int totalY = parse_get_var(buf, "ty", 0);
int outputX = parse_get_var(buf, "ox", 0);
int outputY = parse_get_var(buf, "oy", 0);
bool scale = parse_get_var(buf, "scale", 0) == 1;
bool binning = parse_get_var(buf, "binning", 0) == 1;
free(buf);
log_i("Set Window: Start: %d %d, End: %d %d, Offset: %d %d, Total: %d %d, Output: %d %d, Scale: %u, Binning: %u", startX, startY, endX, endY, offsetX, offsetY, totalX, totalY, outputX, outputY, scale, binning);
sensor_t *s = esp_camera_sensor_get();
int res = s->set_res_raw(s, startX, startY, endX, endY, offsetX, offsetY, totalX, totalY, outputX, outputY, scale, binning);
if (res) {
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t index_handler(httpd_req_t *req)
{
httpd_resp_set_type(req, "text/html");
httpd_resp_set_hdr(req, "Content-Encoding", "gzip");
sensor_t *s = esp_camera_sensor_get();
if (s != NULL) {
if (s->id.PID == OV3660_PID) {
return httpd_resp_send(req, (const char *)index_ov3660_html_gz, index_ov3660_html_gz_len);
} else if (s->id.PID == OV5640_PID) {
return httpd_resp_send(req, (const char *)index_ov5640_html_gz, index_ov5640_html_gz_len);
} else {
return httpd_resp_send(req, (const char *)index_ov2640_html_gz, index_ov2640_html_gz_len);
}
} else {
log_e("Camera sensor not found");
return httpd_resp_send_500(req);
}
}
void startCameraServer()
{
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
config.max_uri_handlers = 16;
httpd_uri_t index_uri = {
.uri = "/",
.method = HTTP_GET,
.handler = index_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t status_uri = {
.uri = "/status",
.method = HTTP_GET,
.handler = status_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t cmd_uri = {
.uri = "/control",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t capture_uri = {
.uri = "/capture",
.method = HTTP_GET,
.handler = capture_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t bmp_uri = {
.uri = "/bmp",
.method = HTTP_GET,
.handler = bmp_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t xclk_uri = {
.uri = "/xclk",
.method = HTTP_GET,
.handler = xclk_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t reg_uri = {
.uri = "/reg",
.method = HTTP_GET,
.handler = reg_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t greg_uri = {
.uri = "/greg",
.method = HTTP_GET,
.handler = greg_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t pll_uri = {
.uri = "/pll",
.method = HTTP_GET,
.handler = pll_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
httpd_uri_t win_uri = {
.uri = "/resolution",
.method = HTTP_GET,
.handler = win_handler,
.user_ctx = NULL
#ifdef CONFIG_HTTPD_WS_SUPPORT
,
.is_websocket = true,
.handle_ws_control_frames = false,
.supported_subprotocol = NULL
#endif
};
ra_filter_init(&ra_filter, 20);
#if CONFIG_ESP_FACE_RECOGNITION_ENABLED
recognizer.set_partition(ESP_PARTITION_TYPE_DATA, ESP_PARTITION_SUBTYPE_ANY, "fr");
// load ids from flash partition
recognizer.set_ids_from_flash();
#endif
log_i("Starting web server on port: '%d'", config.server_port);
if (httpd_start(&camera_httpd, &config) == ESP_OK)
{
httpd_register_uri_handler(camera_httpd, &index_uri);
httpd_register_uri_handler(camera_httpd, &cmd_uri);
httpd_register_uri_handler(camera_httpd, &status_uri);
httpd_register_uri_handler(camera_httpd, &capture_uri);
httpd_register_uri_handler(camera_httpd, &bmp_uri);
httpd_register_uri_handler(camera_httpd, &xclk_uri);
httpd_register_uri_handler(camera_httpd, ®_uri);
httpd_register_uri_handler(camera_httpd, &greg_uri);
httpd_register_uri_handler(camera_httpd, &pll_uri);
httpd_register_uri_handler(camera_httpd, &win_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
log_i("Starting stream server on port: '%d'", config.server_port);
if (httpd_start(&stream_httpd, &config) == ESP_OK)
{
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
}
void setupLedFlash(int pin)
{
#if CONFIG_LED_ILLUMINATOR_ENABLED
ledcAttach(pin, 5000, 8);
#else
log_i("LED flash is disabled -> CONFIG_LED_ILLUMINATOR_ENABLED = 0");
#endif
}
The relevant section of the code that I modified is shown below:
static void draw_face_boxes(fb_data_t *fb, std::list<dl::detect::result_t> *results, int face_id)
{
int x, y, w, h;
uint32_t color = FACE_COLOR_YELLOW;
if (face_id < 0)
{
color = FACE_COLOR_RED;
}
else if (face_id > 0)
{
color = FACE_COLOR_GREEN;
}
if(fb->bytes_per_pixel == 2){
//color = ((color >> 8) & 0xF800) | ((color >> 3) & 0x07E0) | (color & 0x001F);
color = ((color >> 16) & 0x001F) | ((color >> 3) & 0x07E0) | ((color << 8) & 0xF800);
}
int i = 0;
for (std::list<dl::detect::result_t>::iterator prediction = results->begin(); prediction != results->end(); prediction++, i++)
{
// rectangle box
x = (int)prediction->box[0];
y = (int)prediction->box[1];
w = (int)prediction->box[2] - x + 1;
h = (int)prediction->box[3] - y + 1;
if((x + w) > fb->width){
w = fb->width - x;
}
if((y + h) > fb->height){
h = fb->height - y;
}
fb_gfx_drawFastHLine(fb, x, y, w, color);
fb_gfx_drawFastHLine(fb, x, y + h - 1, w, color);
fb_gfx_drawFastVLine(fb, x, y, h, color);
fb_gfx_drawFastVLine(fb, x + w - 1, y, h, color);
#if TWO_STAGE
// landmarks (left eye, mouth left, nose, right eye, mouth right)
int x0, y0, j;
for (j = 0; j < 10; j+=2) {
x0 = (int)prediction->keypoint[j];
y0 = (int)prediction->keypoint[j+1];
fb_gfx_fillRect(fb, x0, y0, 3, 3, color);
}
#endif
}
}</code></pre>
I'm not exactly sure what this function does, but I do exactly what I need to edit. Because this function is called whenever a face is detected, I can simply add some of my own logic to print out a statement whenever a face is detected and then send power out on the ESP32 board's pin 2 to light up an LED.
static void draw_face_boxes(fb_data_t *fb, std::list<dl::detect::result_t> *results, int face_id)
{
Serial.println("FACE DETECTED");
digitalWrite(2, HIGH); // turn the LED on (HIGH is the voltage level)
delay(2500); // wait for a second
digitalWrite(2, LOW); // turn the LED off by making the voltage LOW
int x, y, w, h;
uint32_t color = FACE_COLOR_YELLOW;
if (face_id < 0)
{
color = FACE_COLOR_RED;
}
else if (face_id > 0)
{
color = FACE_COLOR_GREEN;
}
if(fb->bytes_per_pixel == 2){
//color = ((color >> 8) & 0xF800) | ((color >> 3) & 0x07E0) | (color & 0x001F);
color = ((color >> 16) & 0x001F) | ((color >> 3) & 0x07E0) | ((color << 8) & 0xF800);
}
int i = 0;
for (std::list<dl::detect::result_t>::iterator prediction = results->begin(); prediction != results->end(); prediction++, i++)
{
// rectangle box
x = (int)prediction->box[0];
y = (int)prediction->box[1];
w = (int)prediction->box[2] - x + 1;
h = (int)prediction->box[3] - y + 1;
if((x + w) > fb->width){
w = fb->width - x;
}
if((y + h) > fb->height){
h = fb->height - y;
}
fb_gfx_drawFastHLine(fb, x, y, w, color);
fb_gfx_drawFastHLine(fb, x, y + h - 1, w, color);
fb_gfx_drawFastVLine(fb, x, y, h, color);
fb_gfx_drawFastVLine(fb, x + w - 1, y, h, color);
#if TWO_STAGE
// landmarks (left eye, mouth left, nose, right eye, mouth right)
int x0, y0, j;
for (j = 0; j < 10; j+=2) {
x0 = (int)prediction->keypoint[j];
y0 = (int)prediction->keypoint[j+1];
fb_gfx_fillRect(fb, x0, y0, 3, 3, color);
}
#endif
}
}
The following added code writes to the Serial monitor and powers on the LED connected to pin 2.
Serial.println("FACE DETECTED");
digitalWrite(2, HIGH); // turn the LED on (HIGH is the voltage level)
delay(2500); // wait for a second
digitalWrite(2, LOW); // turn the LED off by making the voltage LOW</code></pre>
Hardware
N.B. The USB shield is still used for coding and providing power, but I manually wired the connections between the pins that the USB shield actually uses to communicate with the ESP32 camera board. Doing this allows me to access the other pins that I could not previously access because the shield was monopolizing them despite not using them for anything. This allows me to access pin 2 for powering my LED.
I assembled a quick circuit with a breadboard consisting of a resistor and LED, with power coming from pin 2 of the ESP Camera board and ground going into a ground pin. Here is a video of the sensor powering the LED when a face is detected:
You can see the LED power on and start blinking when the camera is pointed towards my face, and when I point the camera towards the wall on the side where there are no faces being detected, the LED turns off.
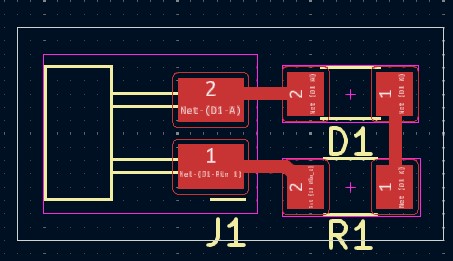
Because the entirety of my sensor is the ESP32 Camera board itself, I still needed to create a custom board for this week. However, I don't want to solder down the ESP32 board and lock it in to the PCB I created because I needed the ESP32 for a different function in my final project. As such, I designed a simple board to contain the resistor and LED.
Here is the schematic and board in KiCAD.
 |
 |
I then milled and soldered the PCB.

Here is a video of the system working and powering the LED on the PCB when the camera detects a face.