Networking and Communications
Week 13 (less weeks to go 😱). This week we learned about different ways to communicate between devices:
- Wired communication (Parallel): Asynchronous, SPI, I2C
- Wireless communication (Serial): Bluetooth, WiFi.
In addition, I explored documentations and found a blog, which explains about Network Topology. In the article, it says that a network consists of several components, such as different devices called nodes and links or connections. These connections can be arranged logically or physically. There are two types of connections in a computer network system. These types are as follows:
- Physical Network Topology: It can be explained as the type of connection that is tangible. These are the physical connections in a network such as wires, routers, switches, cables, etc. It is the physical layout of nodes and the connection between the nodes of the network.
- Logical Network Topology: It can be explained as the non-tangible part of the connection or the software configuration of the network. It shows how data flows inside of a network. An example of such configuration is VLAN’s (Virtual LAN’s). Logical topologies of two systems can be the same even if they have different physical topology.
Among the tasks to be performed is to establish a communication between two projects:
- Alejandro: servo motor (output) or temperature sensor (input)
- Glenda: speaker (output)
- Paty (me): capacitive sensor (input) or LCD display (ouput)
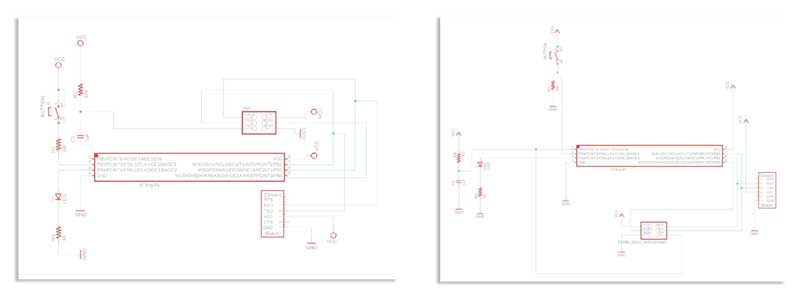
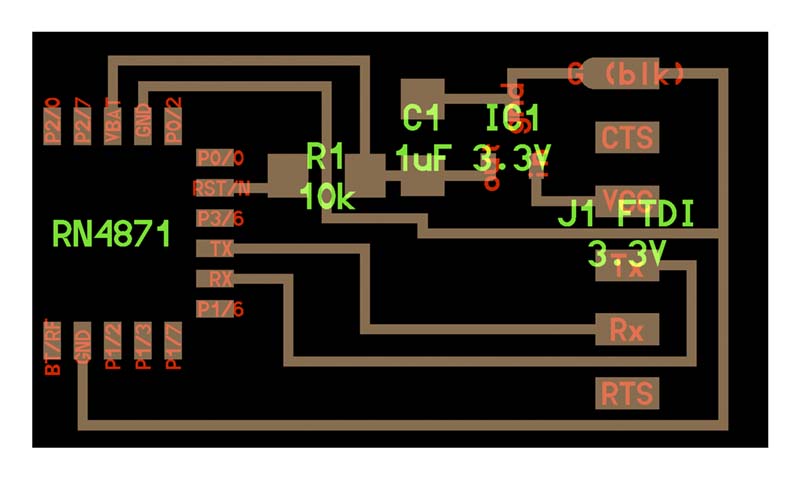
Well, but we chose the way of communication via Wireless, through the RN4871 (2.4 GHz Bluetooth) module (🫣) since some of the final projects would need this module and therefore it was a good opportunity to test.
This low power module, whose characteristics can be found in the following Data Sheet.
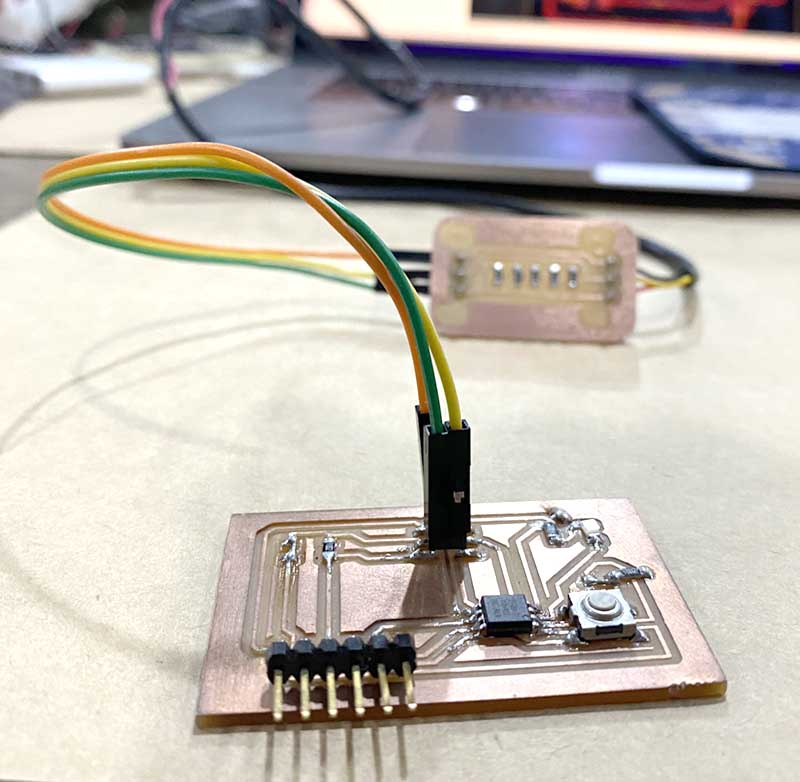
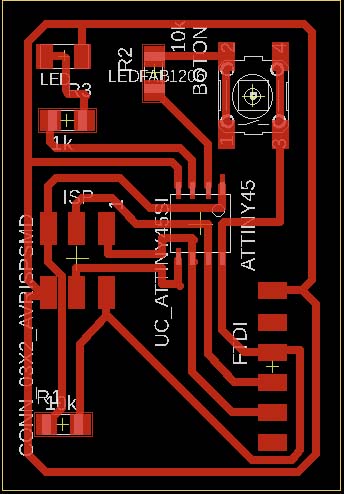
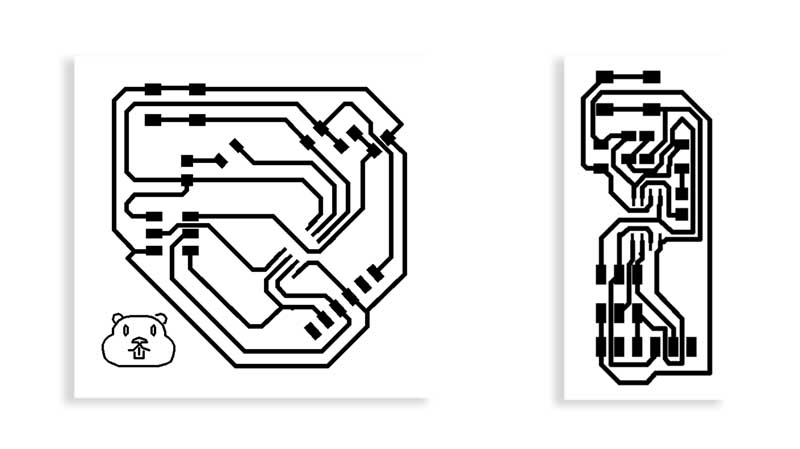
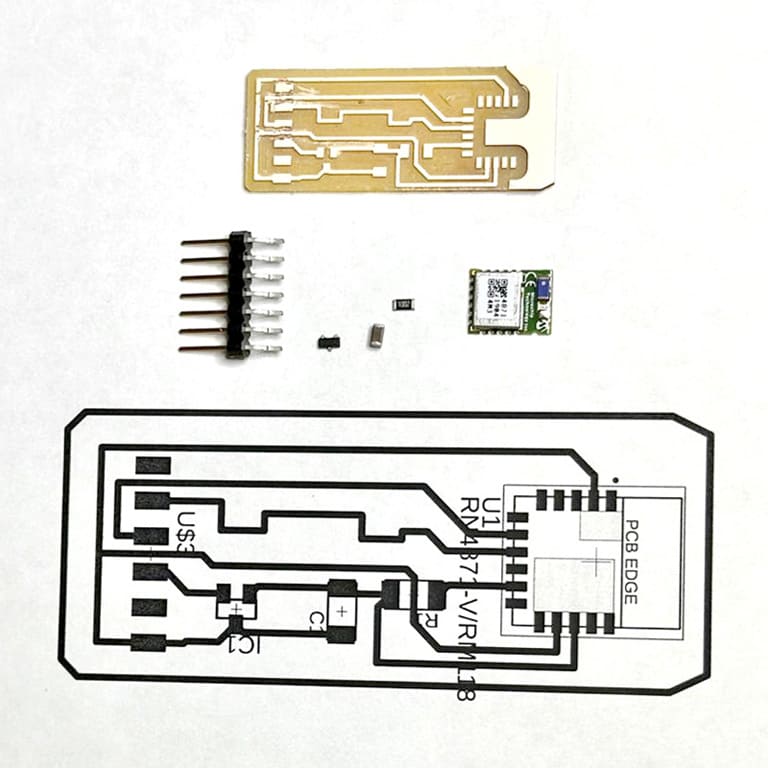
Alejandro had the task of making the schematic designed a board following the FabAcademy example, and machining it. I was in charge of soldering the components.
Bluetooth v2, v3...
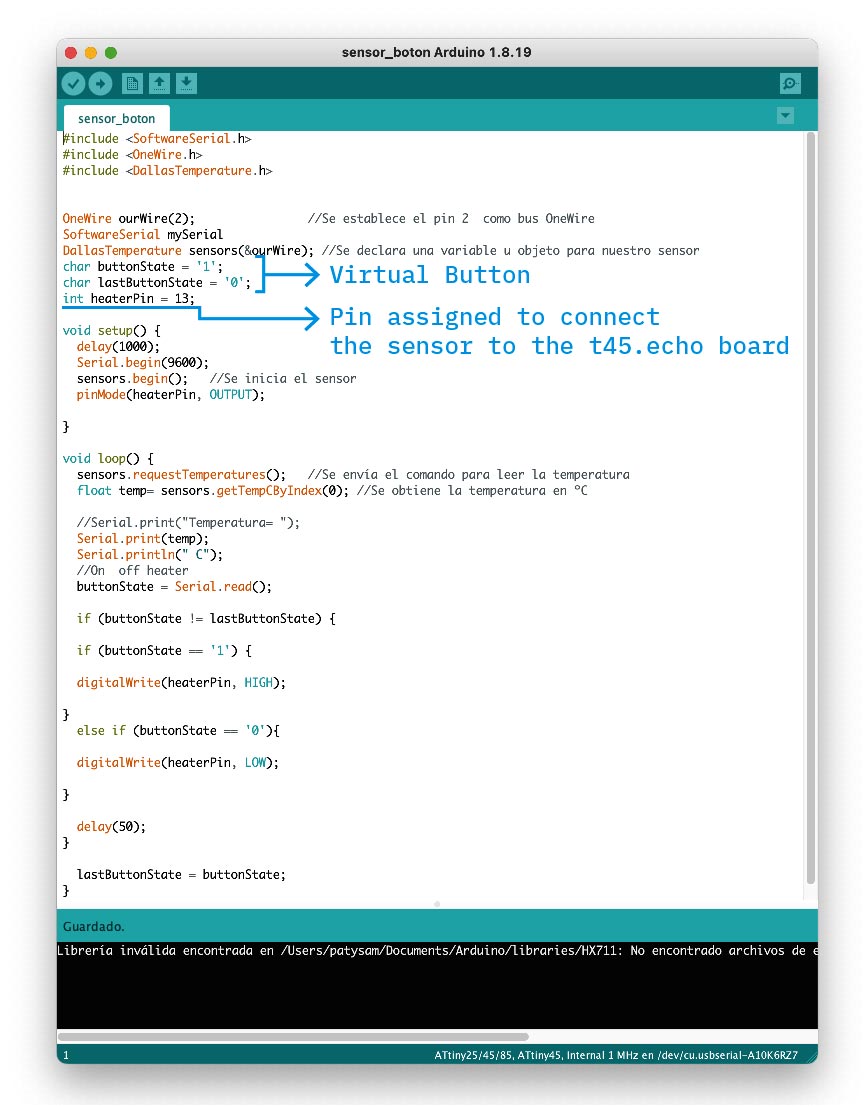
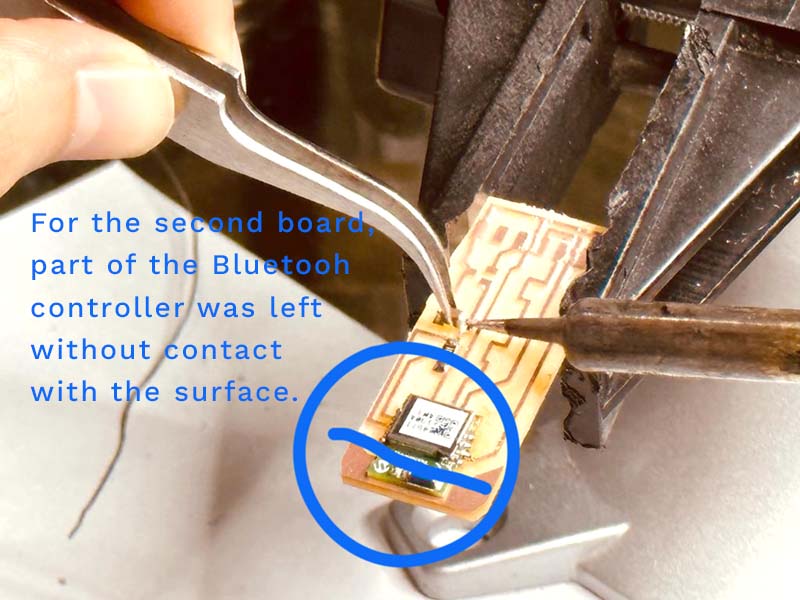
The design, machining and soldering of the components went smoothly... however, when it came time for programming and verification of operation, no ☹️. Communication simply did not take place.
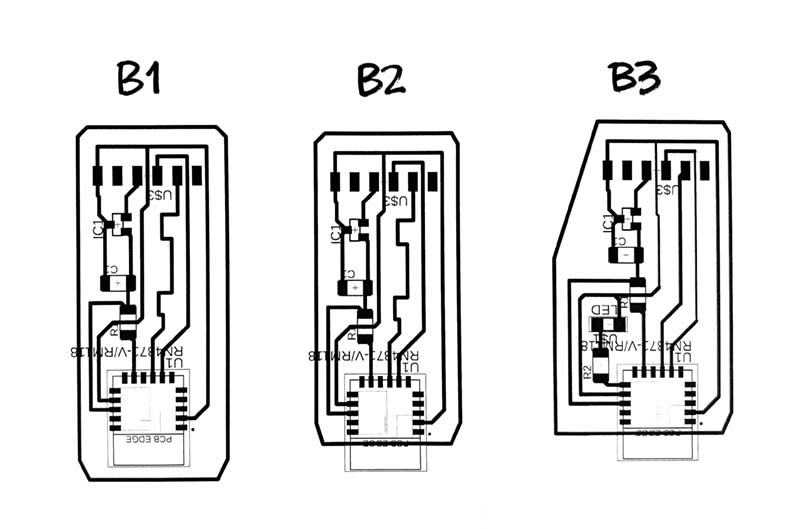
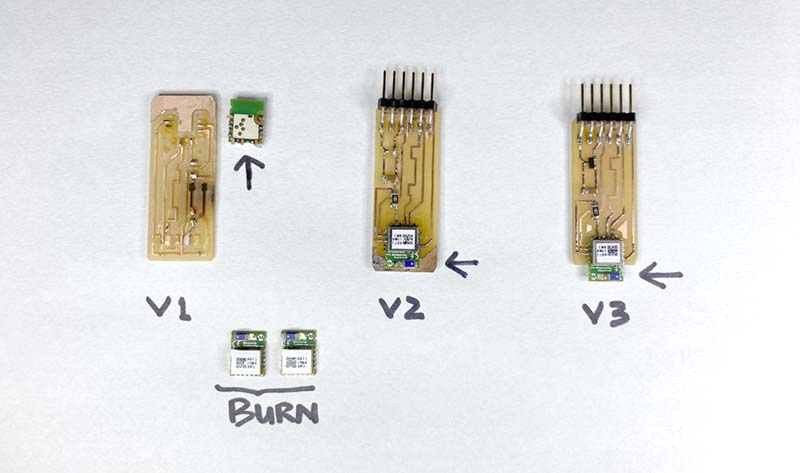
Other documentation was reviewed, the design of the first version was adjusted... and still no communication. After several adjustments, we finally performed a test with a Bluetooh HC01 module, with which we were able to establish serial communication.