Problems and challenges:¶
The main problems I had when I was making this project:¶
When motor rotate and stops and rotate again:¶
I had this problem when I was testing the code on the Arduino UNO, when I used the PWM.h library along with the code the light strobes (frequency), the motor started to rotate then stops for short period of time then starts again.
That because I have connected the pin 10, and it shares the Timer1 as the pin 9 which I have connected the LED into.
I have change it to a pin that does not share the same Timer and either 3 or 11, the motor works properly now.
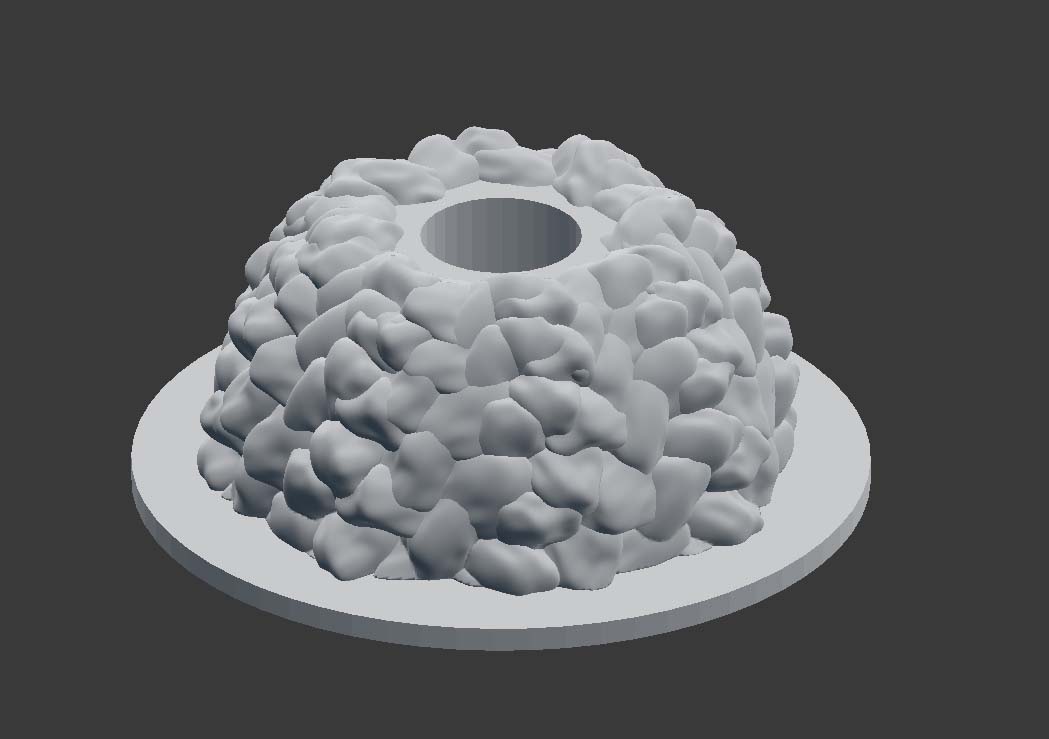
Problem with the model!!!¶
When I have tested the code, the effect of the animation did not work, so I went back and printed a small zoetrope that works and have found that:
-
Modeling my zoetrope currently works on computer animation, but not on my setup.
-
The zoetrope that John Edmark designed are changes on size from bottom to top.
-
On my design, I did not leave much space between each Fibonacci spiral.
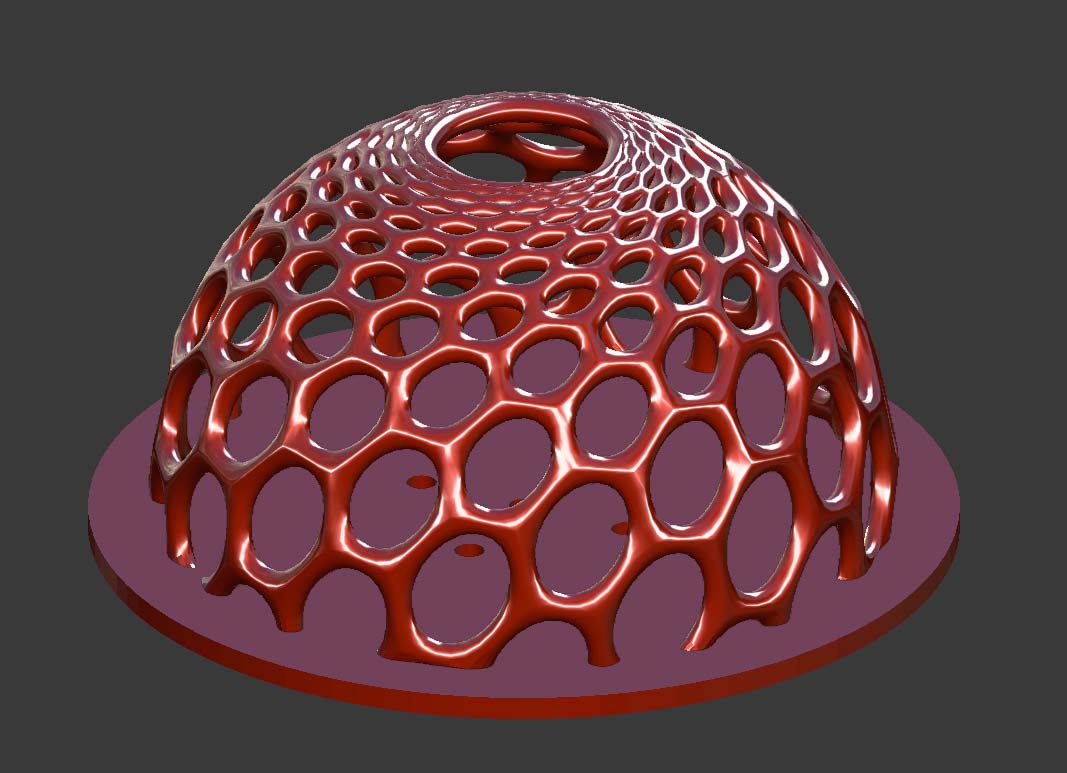
Unfortunately, the model that I have made on the Molding and casting week will not work because of the previous reasons.
Choosing an encoder for the project:¶
At start, I was going to use the Photoelectric speed sensor encoder, but the main issue that I am using a bright light, and it make the reading unreliable because it will affect the readings from the Photoelectric encoder.

Then I was going to use the Hall Effect Magnetic Sensor, but I have to consider the design to put a magnet of the rotating plate, but after I made the Lazy Susan, from 3d printer part and bearings and screws, the magnet will be affecting the rotating speed, because it be attracted to the metal parts.
But unfortunately the motors that we had here do not have the power or the right speed range.
Voltage regulator!!!¶
I have design and milled two power supply board, and it is a good thing that I had made it that way, because I had major problems with my project because of it.
This video shows the signal sent to drivers are not powerful enough to start the LED and the motor:
This video shows the board works perfectly with USB FTDI connection, works with power back too:
Because I don’t have much time working with project, I have decided to use a power bank to just power the microcontroller.