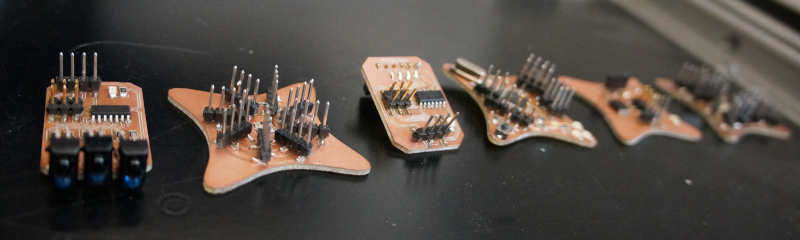
A modular robot system also needs a modular board system. Therefore I designed several boards which can be combined with each other via i2c. I have one main master board and several smaller slave boards.
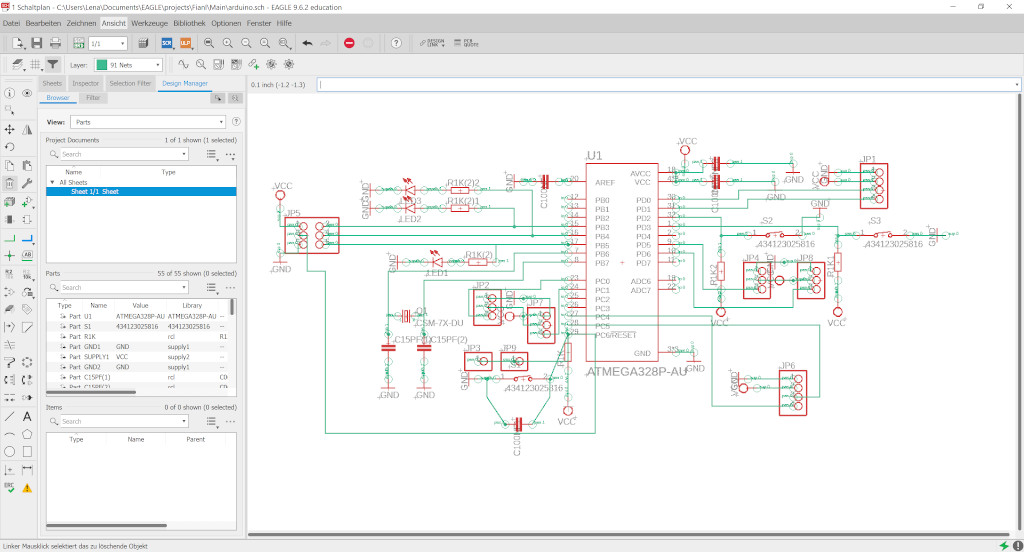
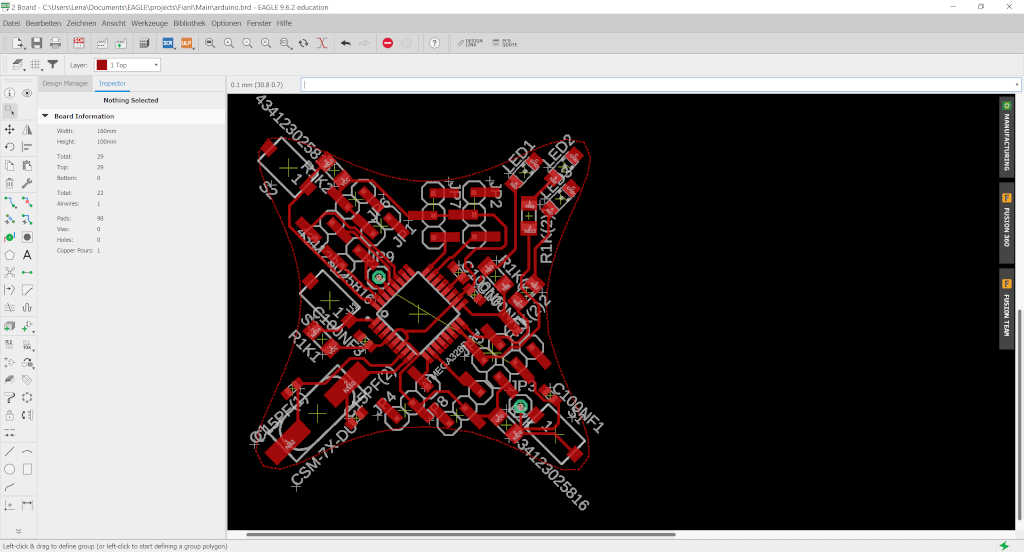
This is my main board as going it has an Atmeg328p. You can connect one to four sensors and actuators directly. It also has an I2C connector to communicate with the other boards.

| Parts | Type | Value | In Eagle |
|---|---|---|---|
| ATmega328P | TQFP | - | ATmega328P-AU |
| Resistor | 1206 | 1KΩ | R1K, R1k(2) |
| LED rad | 1206 | - | LEDRAD |
| Capacitor | C | 100nF | C100NF, C100nf1 |
| Capacitor | C | 15pF | C15pF(1), C15pF(2) |
| Quarrz | 16MHZ | Q1 | |
| Button | - | 434123025816 |
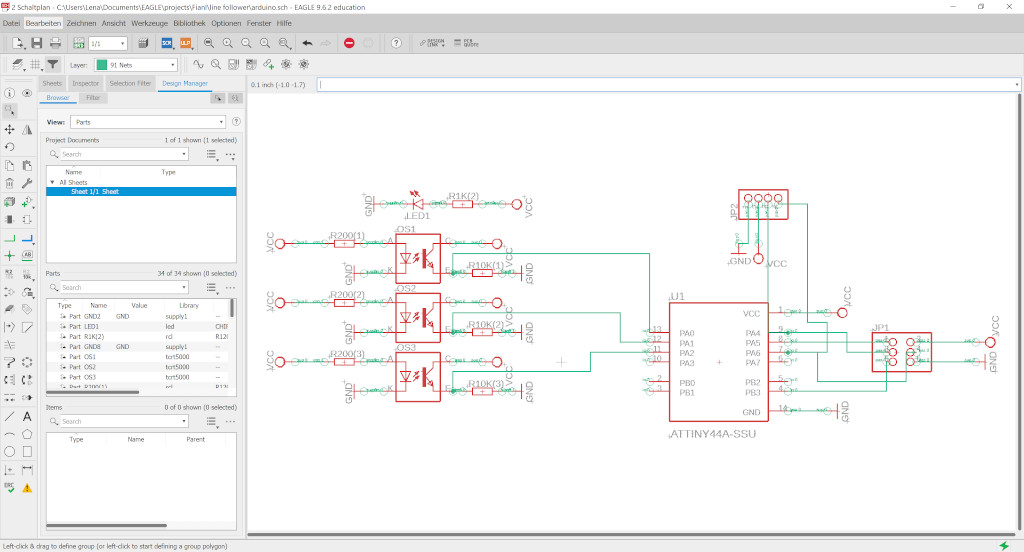
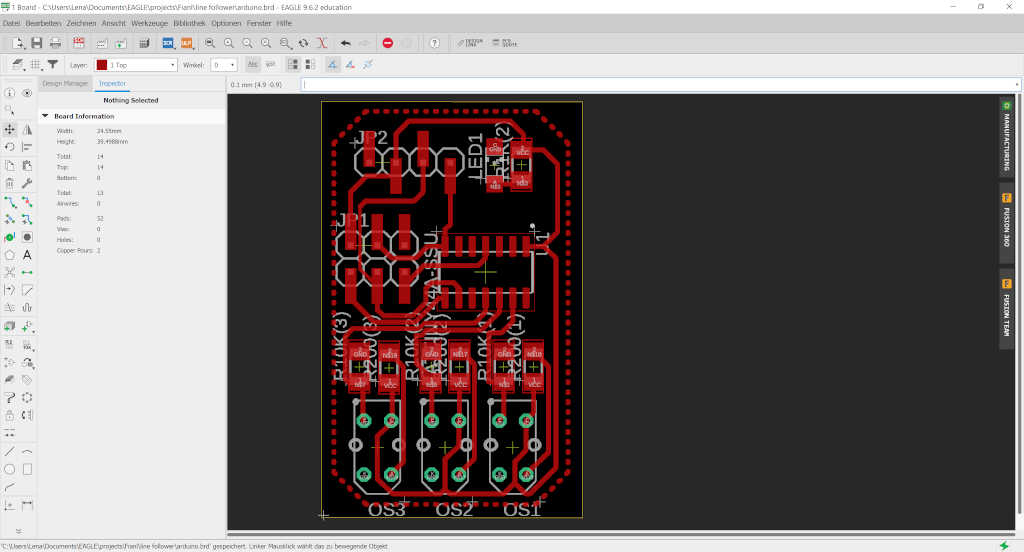
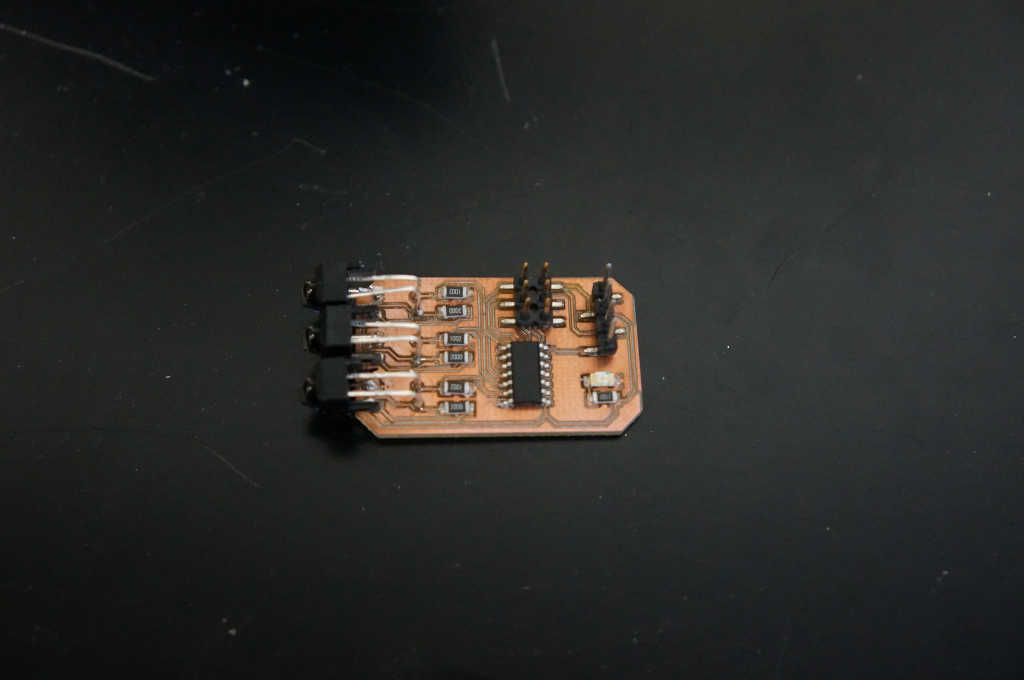
An easy way for a robot to move in space is to follow a line. To recognize such a line for example on the floor I have equipped a board with 3 infrared LEDs and receivers. It also has an Attiny 44 to communicate with the main palatine.
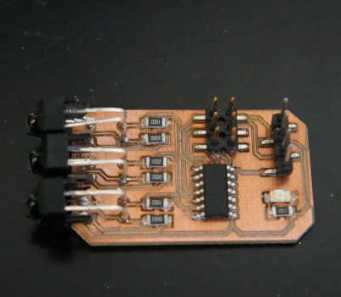
| Parts | Type | Value | In Eagle |
|---|---|---|---|
| Attiny44 | - | - | Attiny44 |
| Resistor | 1206 | 10KΩ | R10(1-3) |
| Resistor | 1206 | 1KΩ | R1 |
| Resistor | 1206 | 200Ω | R200(1-3) |
| Resistor | 1206 | 1KΩ | R1(1) |
| LED yellow | 1206 | - | LEDYELLOW |
| Pin Header 1x6 | PINHD6 | - | JP1-4 |
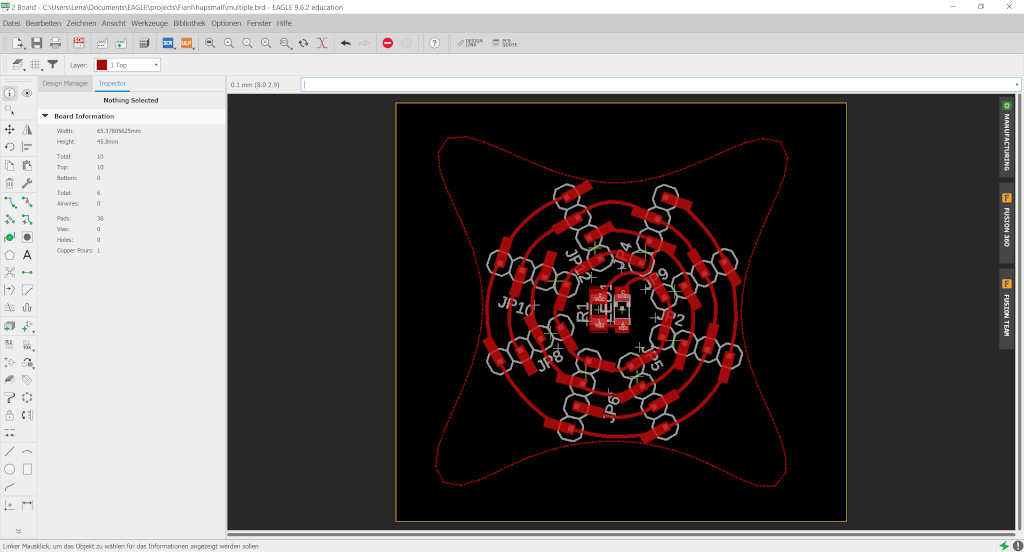
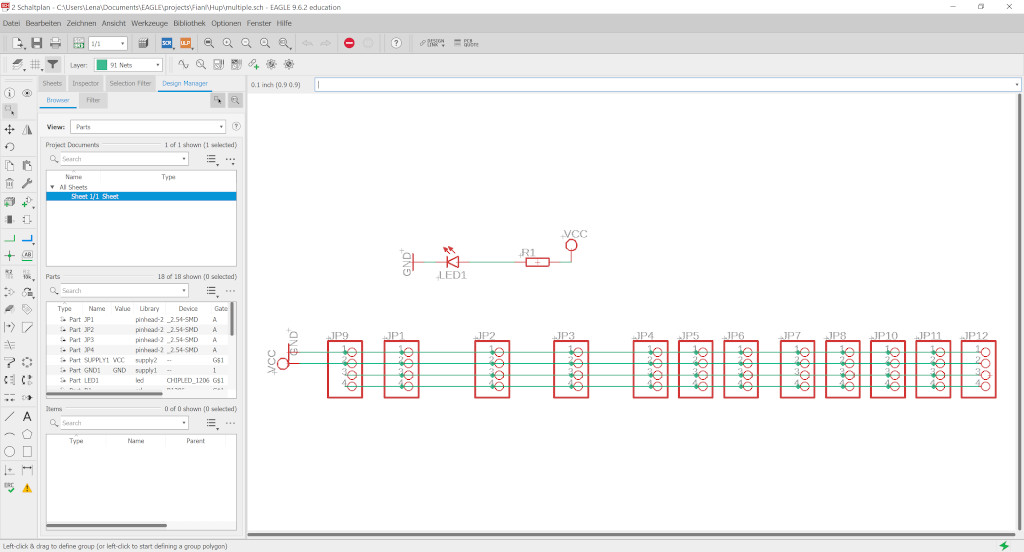
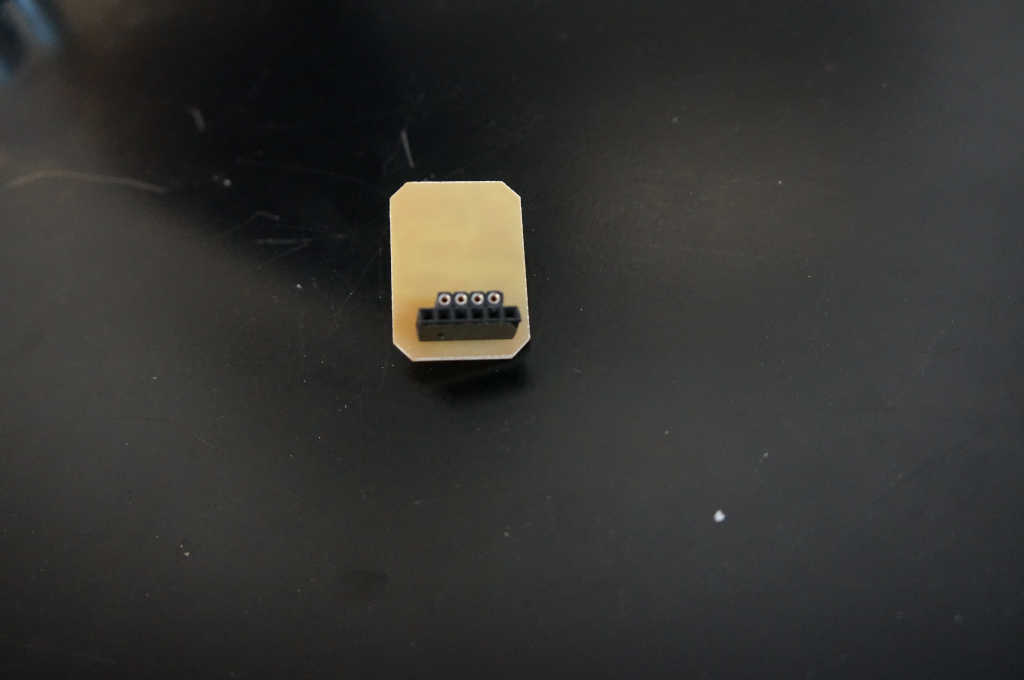
In order to let several boards communicate with each other without creating a huge cable chaos I have created a horn which serves the purpose of making several I2C connections.
| Parts | Type | Value | In Eagle |
|---|---|---|---|
| Resistor | 1206 | 1KΩ | R1 |
| LED1 | 1206 | - | LEDYELLOW |
| Pin Header 1x4 | PINHD6 | - | JP1-12 |
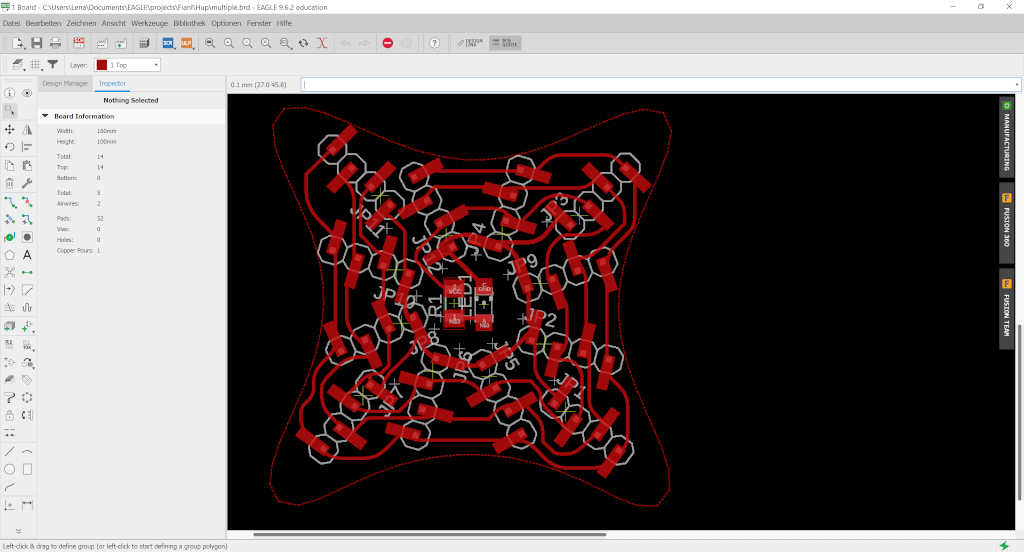
There are of course already a lot of sensors which can communicate via I2C so I created a big horn for bigger projects with many sensors and actuators.

| Parts | Type | Value | In Eagle |
|---|---|---|---|
| Resistor | 1206 | 1KΩ | R1 |
| LED1 | 1206 | - | LEDYELLOW |
| Pin Header 1x4 | PINHD6 | - | JP1-12 |
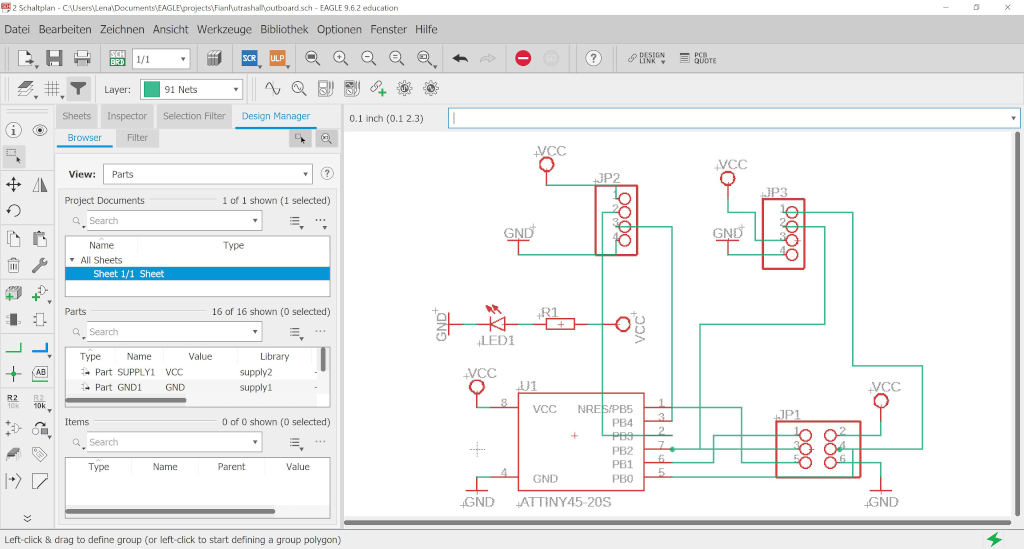
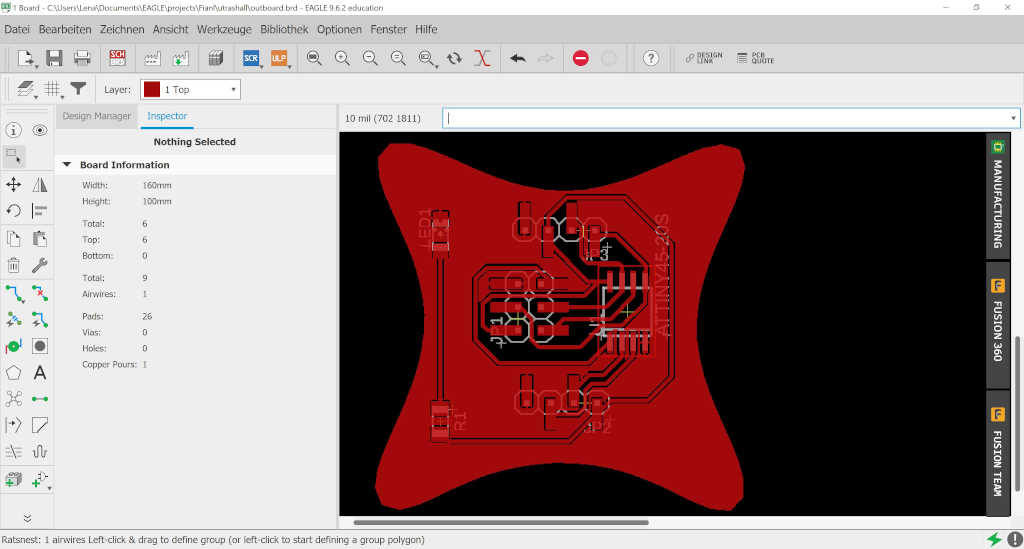
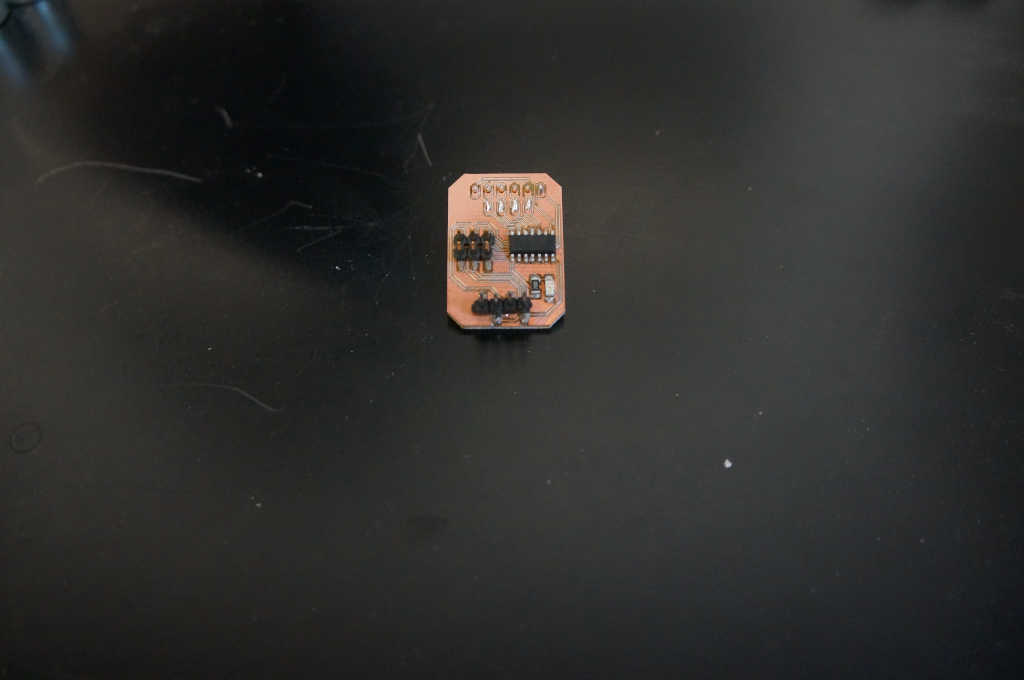
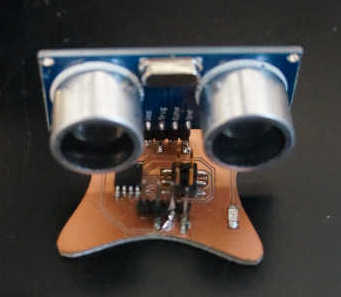
As a further orientation aid in the room ultrasonic sensors are often used, therefore I have also created a small board with an Attiny 45 on which you just have to put it on.
| Parts | Type | Value | In Eagle |
|---|---|---|---|
| Resistor | 1206 | 1KΩ | R1(1) |
| Attiny45 | - | - | V1 |
| LED yellow | 1206 | - | LEDYELLOW |
| Pin Header 1x4 | PINHD4 | - | JP1 |
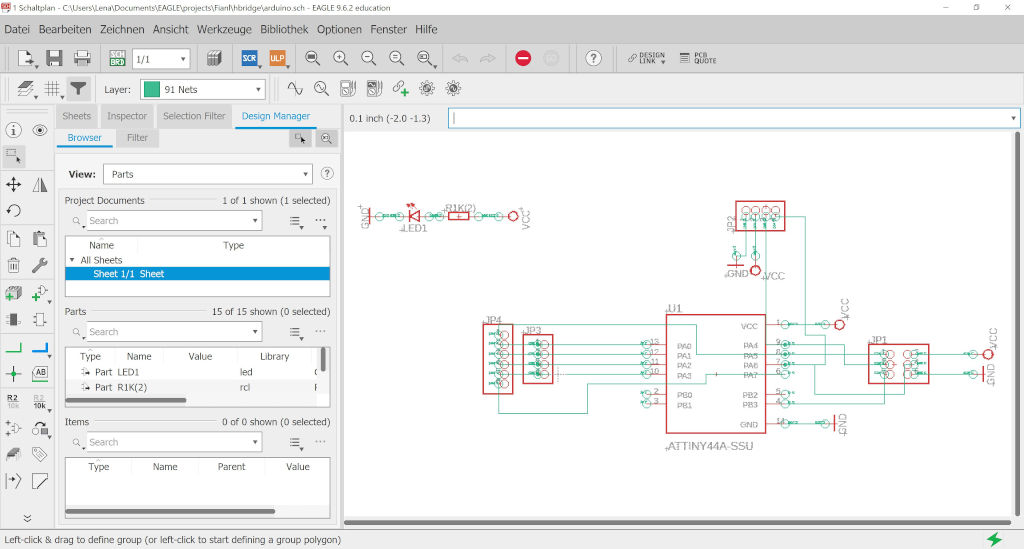
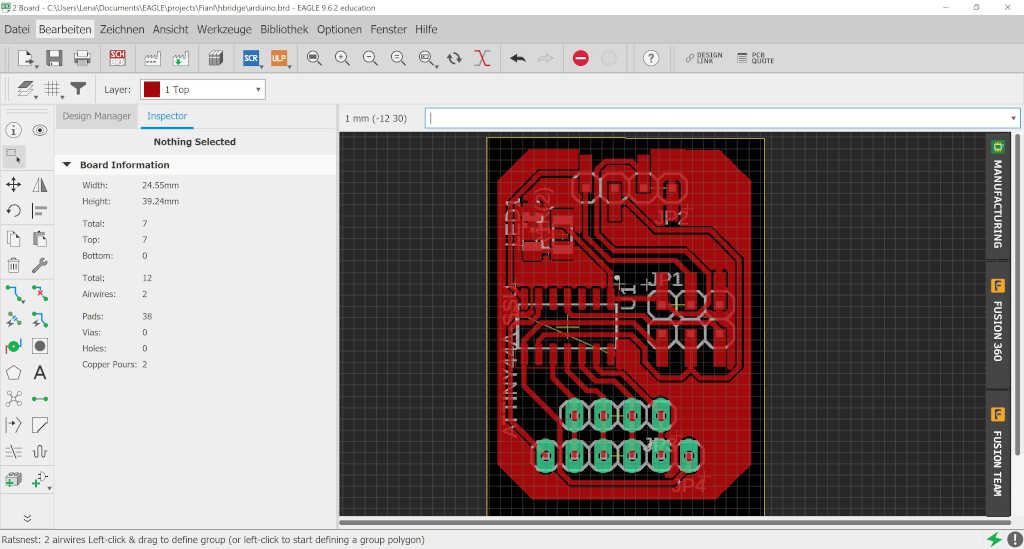
Now I have already created several sensor boards. There are still missing actuators. There are already a lot of good working bridges so I don't need to create them myself. Instead I have created a small board which you can put on the habrücke. There are 2 variants for the first one you leave the jumper drnan and plug it with the 4 pins and can control the direction in which the motors turn. With the 2 variant you take the jumpers away and put the 6 pins on them. Then you can also control the speed with which the robot moves. Furthermore there is also an attiny 44 on the board.

| Parts | Type | Value | In Eagle |
|---|---|---|---|
| Resistor | 1206 | 1KΩ | R1(1) |
| Attiny44 | - | - | Attiny44 |
| LED yellow | 1206 | - | LEDYELLOW |
| Pin Header 1x4 | PINHD4 | - | - |
| Pin Header 1x6 | PINHD6 | - | - |