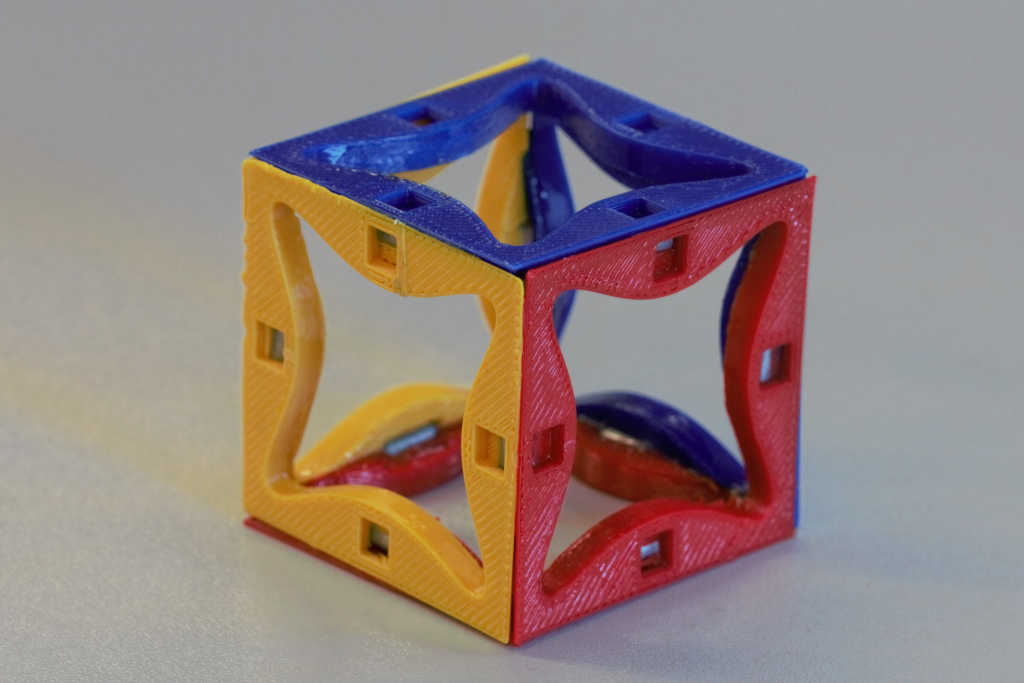
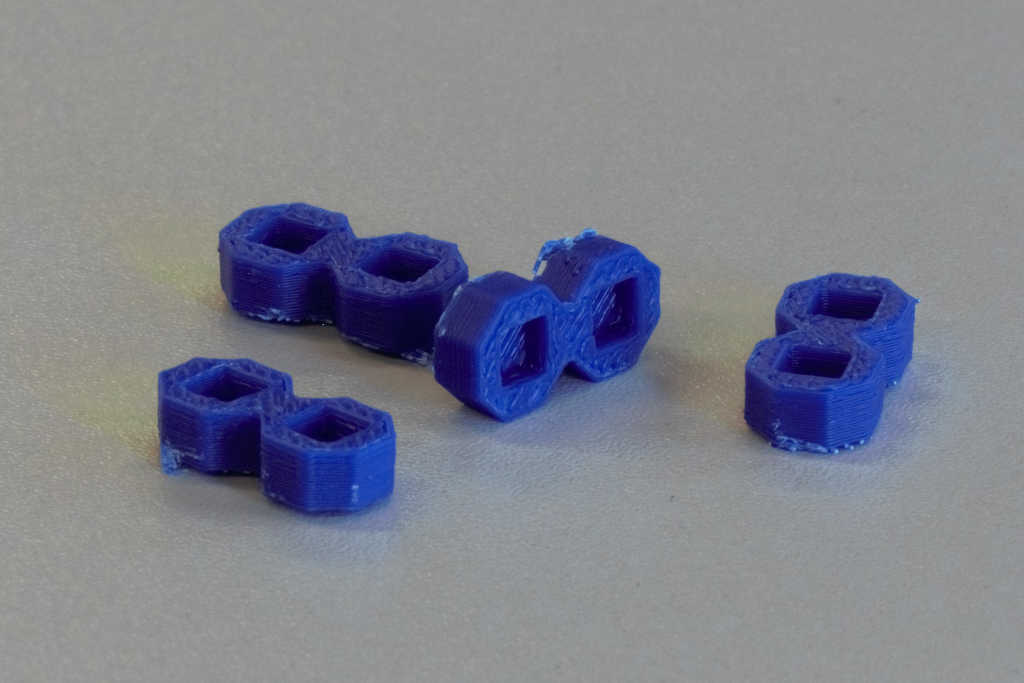
I designed and printed a basic block for the robot sysem. The cube is made of six of the same part, because the block is printed in one piece. it breaks easily.

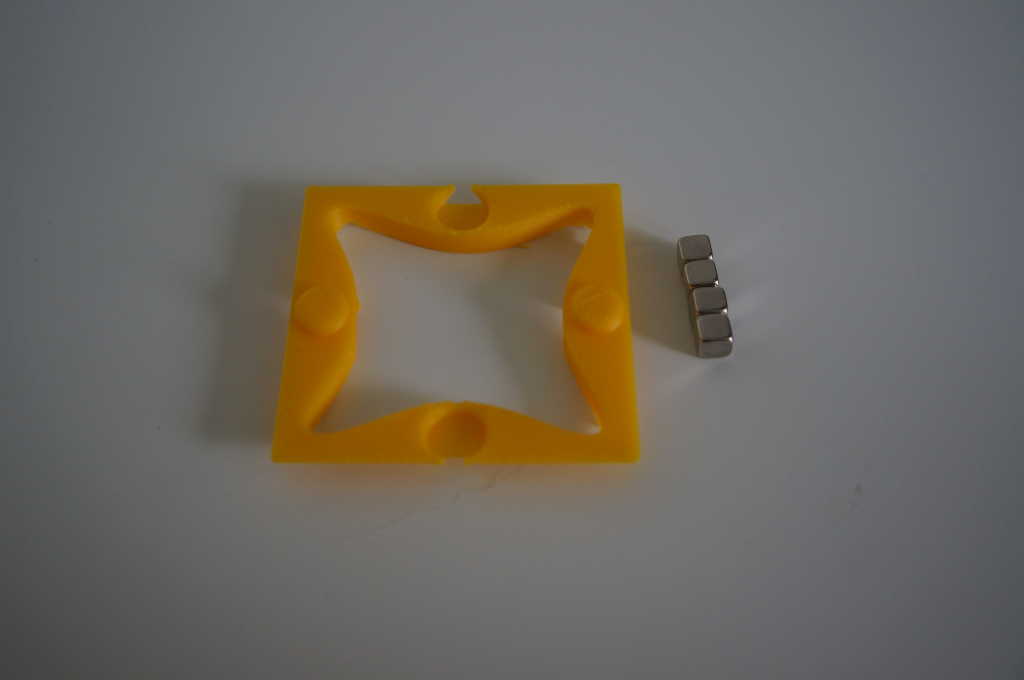
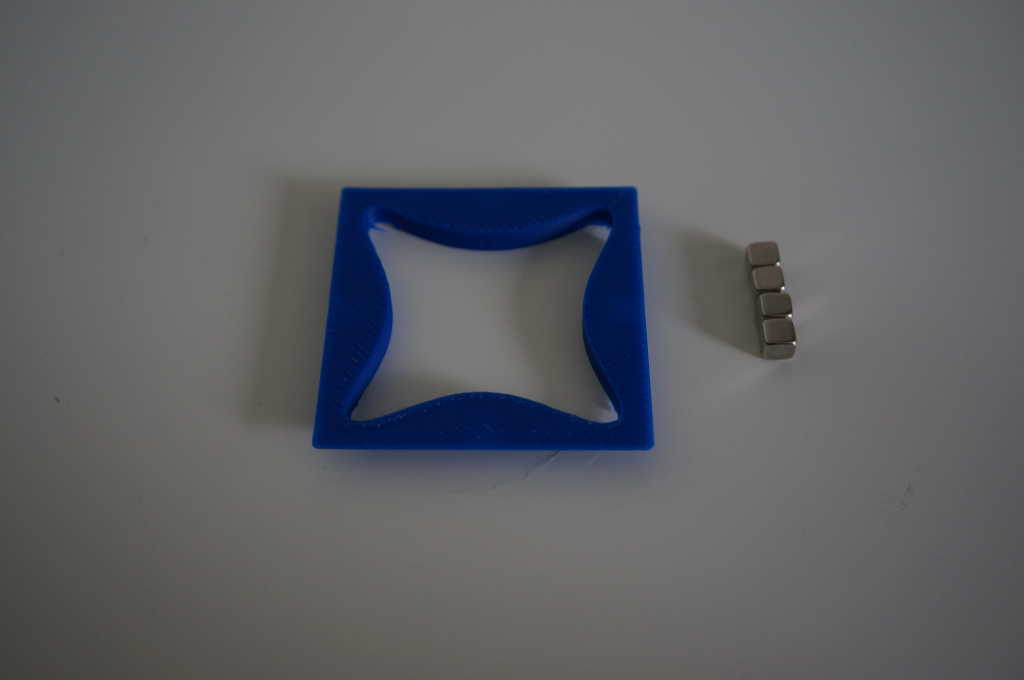
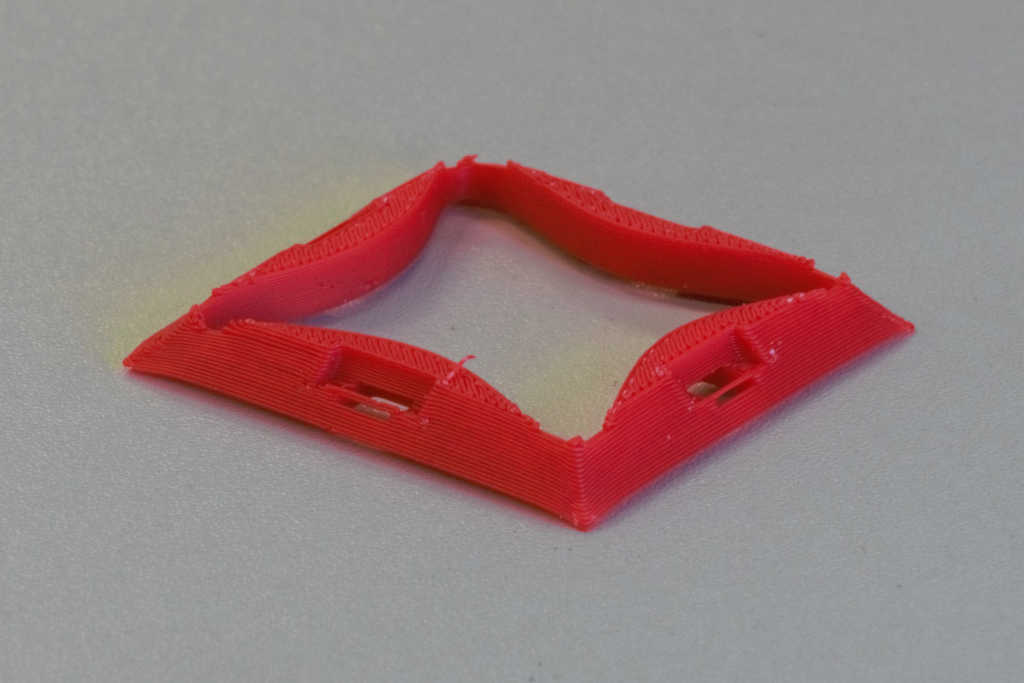
First step: parts for the basic block.

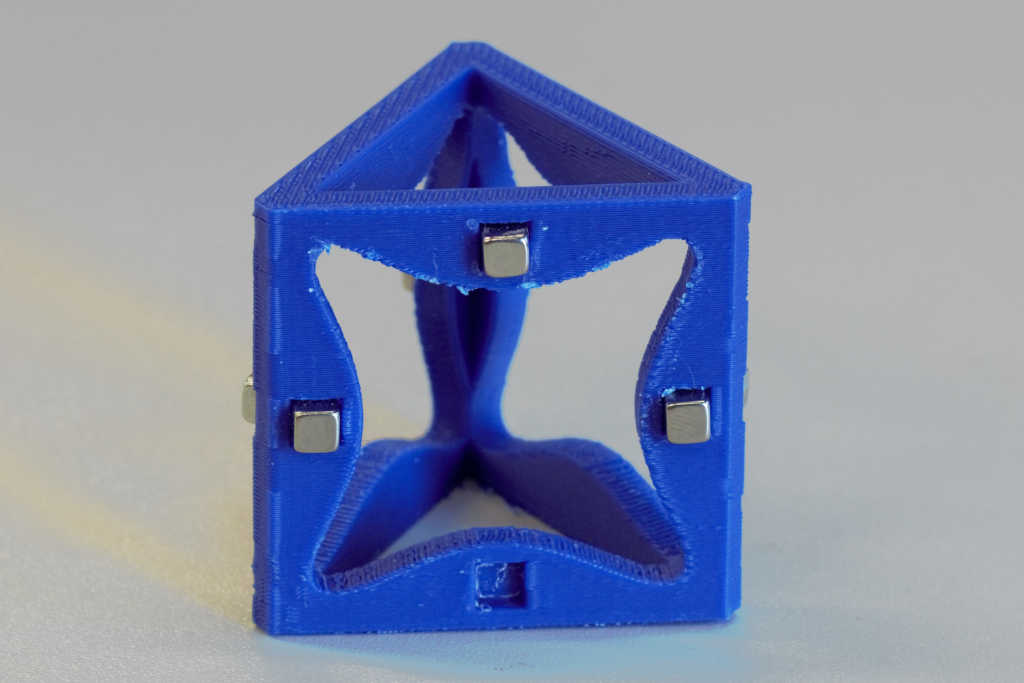
For the second step, I glued the magnets in the sides.
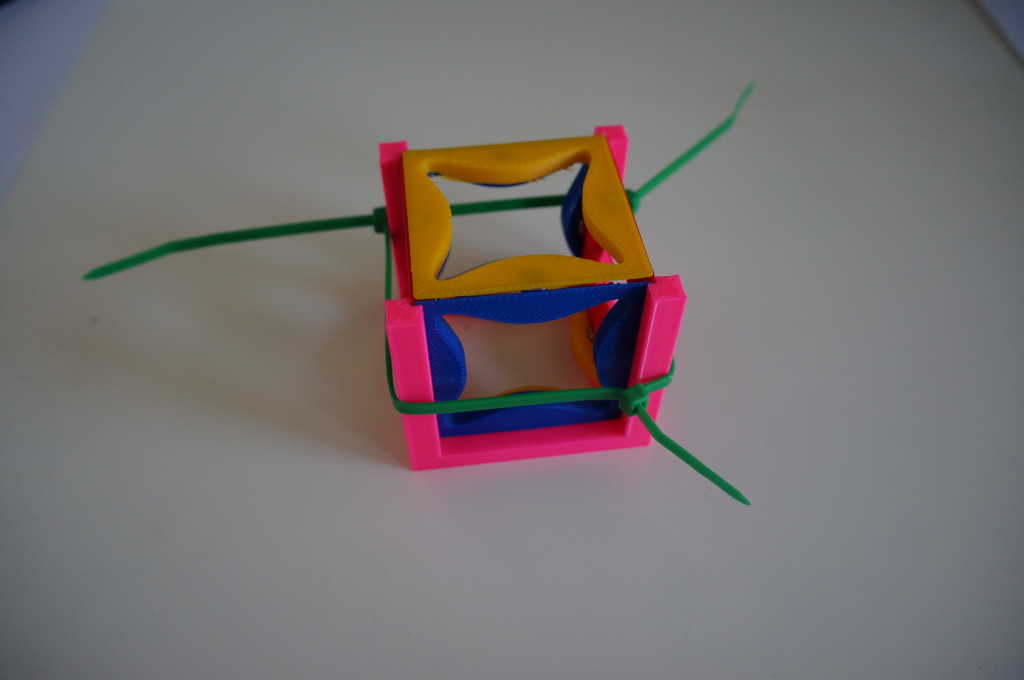
Third step: basic block in the bonding aid (pink) and tightened them with cable ties, rubber bands can also be used for this.

Fourth step: acetone steam bath. Since the material is ABS, the parts now stick together. It's important that the bonding aid is not made of ABS.
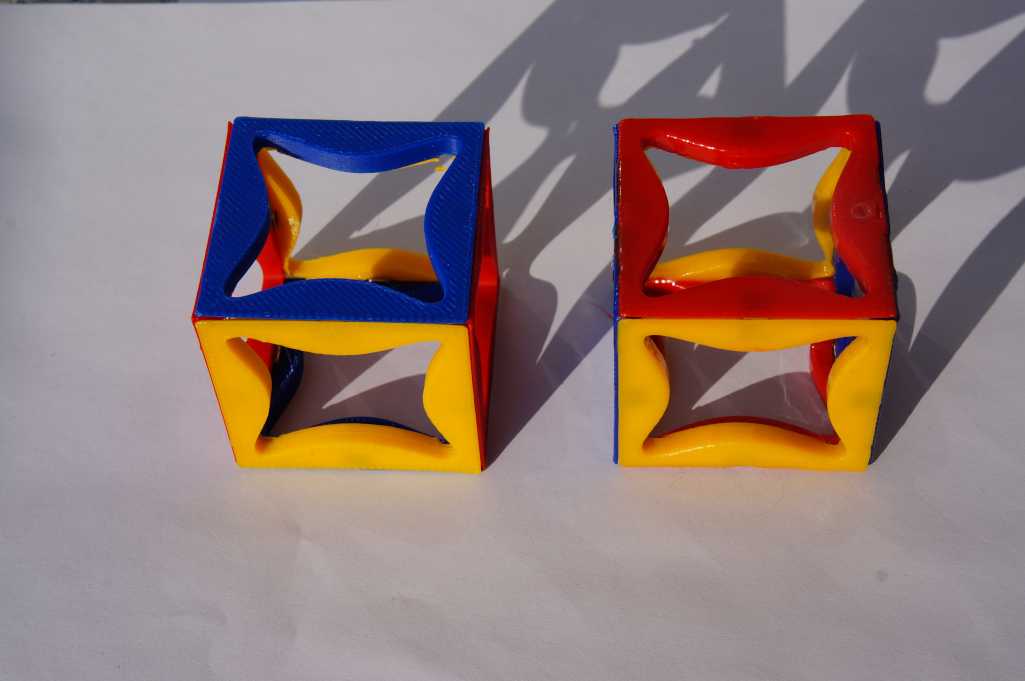
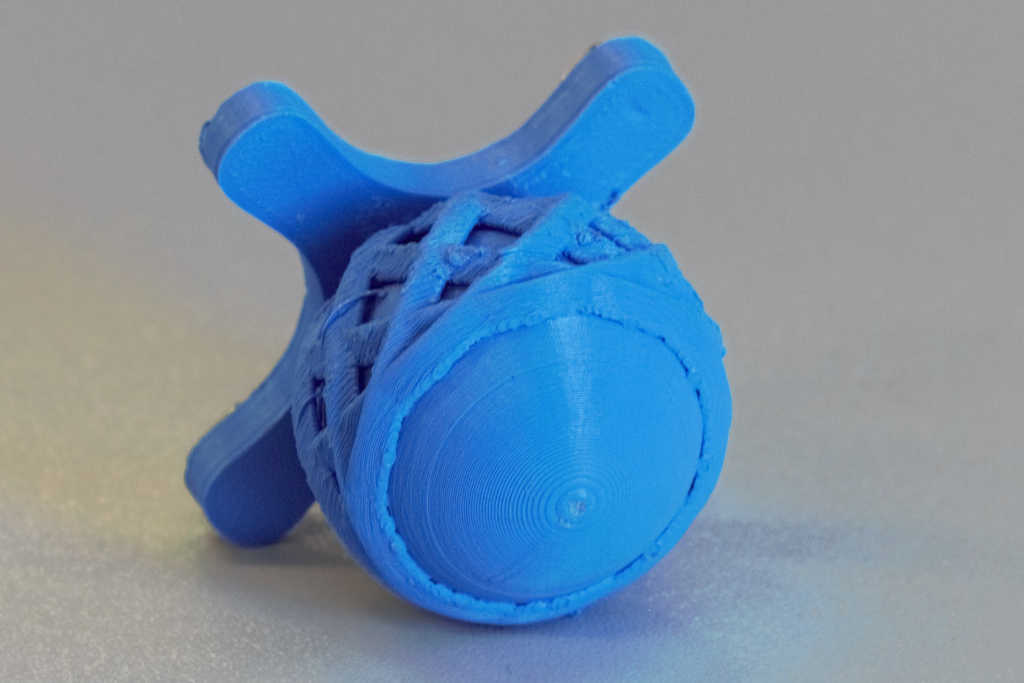
Left: unprocessed print, right: print after the steam bath.
In the course of the FabAcademy I experimented with it to get a well working connector system.
In the end I decided to use this system for the main blocks You have six 3D printed parts which are glued with acetone. Into the parts you glue 12 small fero magnetic parts before. Where the magnets will hold on to later.
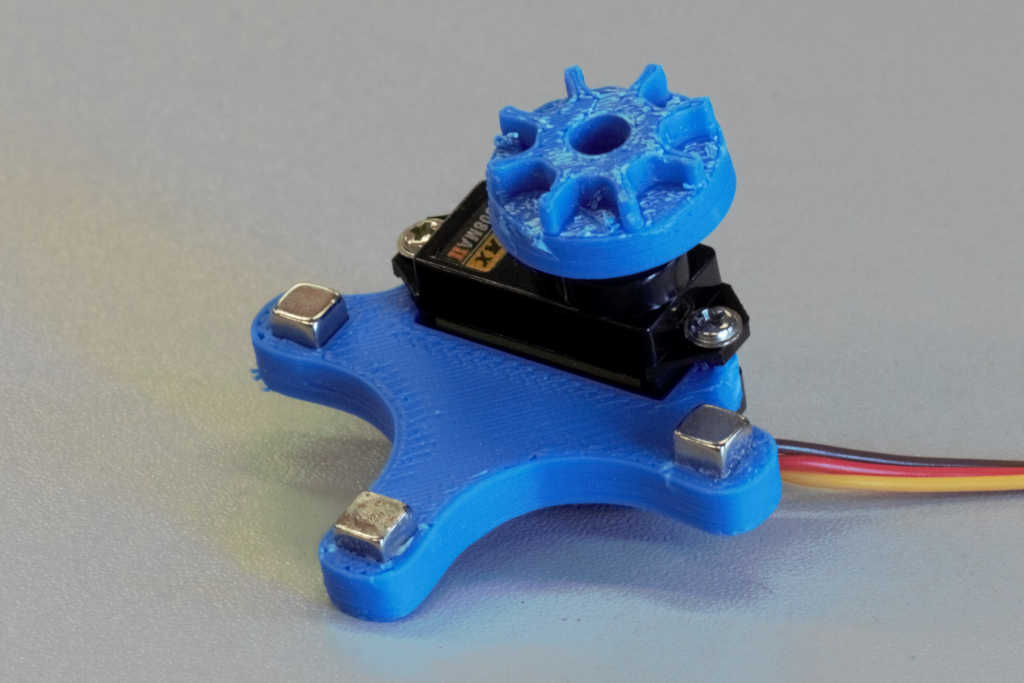
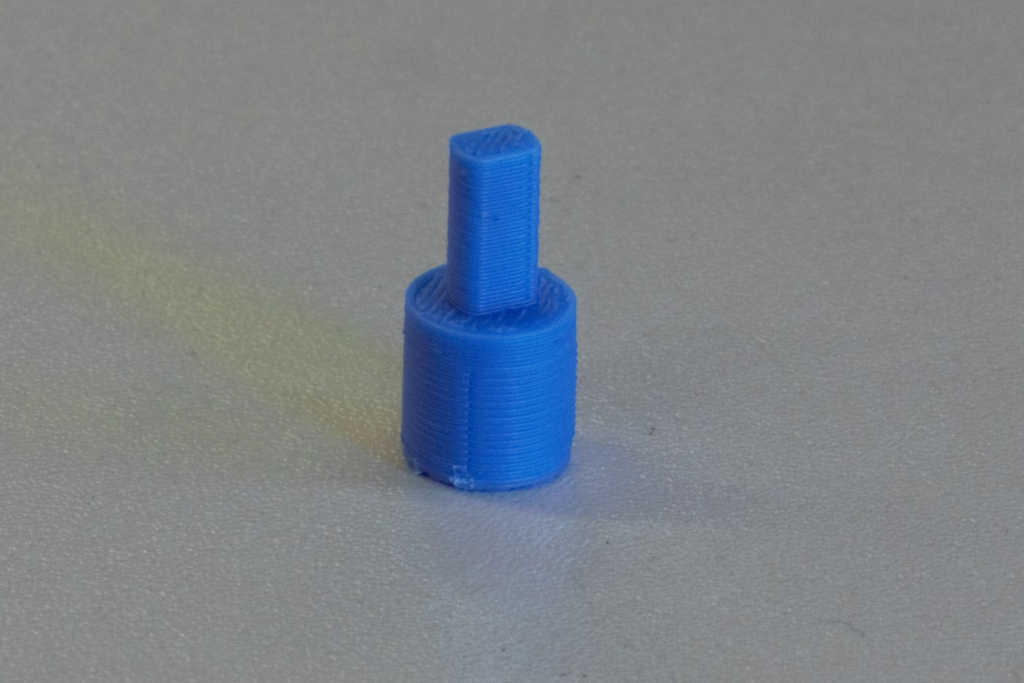
Since not all of my tires hold perfectly on the engines I have developed adapters so that they hold better.
To mount a 9V battery I designed an adapter which holds with 4 magnets simply on the form.

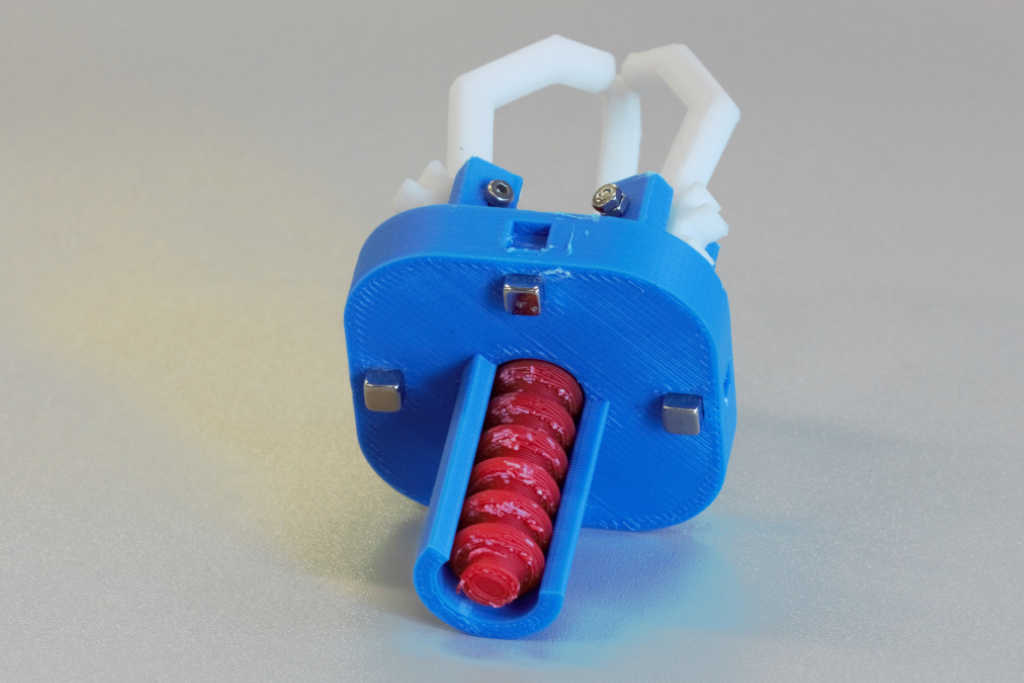
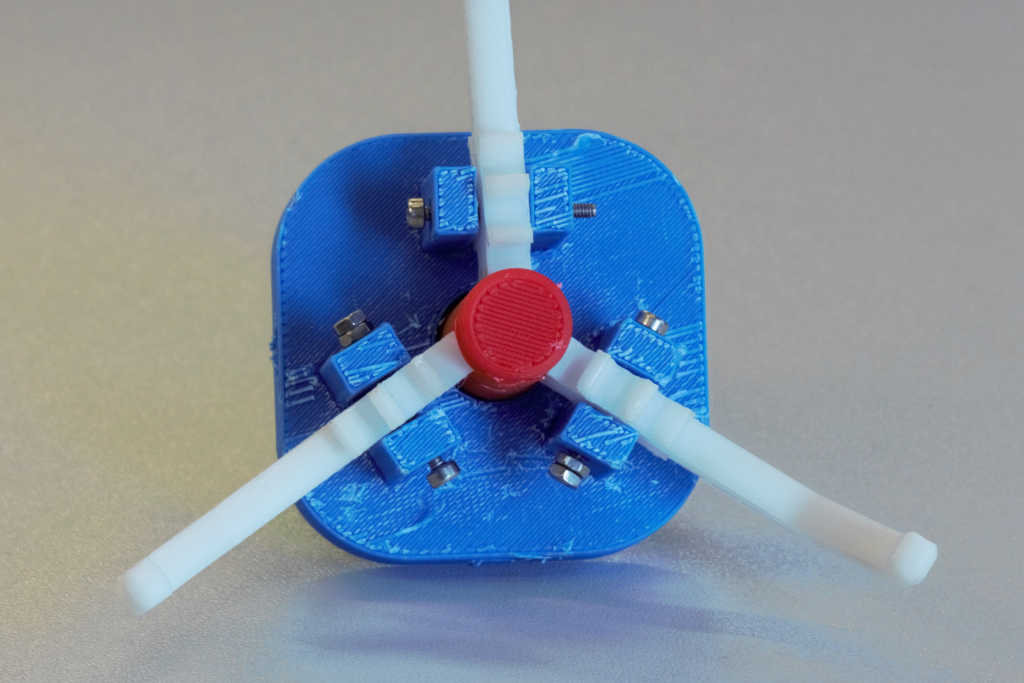
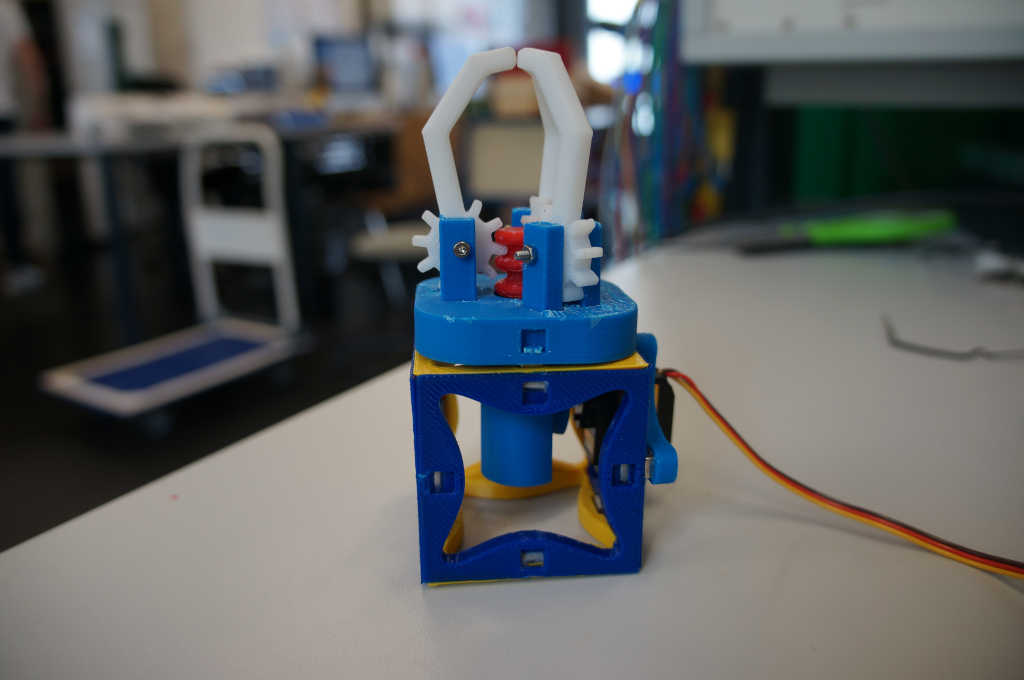
To be able to grip something with a robot I have designed a 3 finger gripper which can be controlled by a servo. All parts can be connected to a normal main block with magnets.
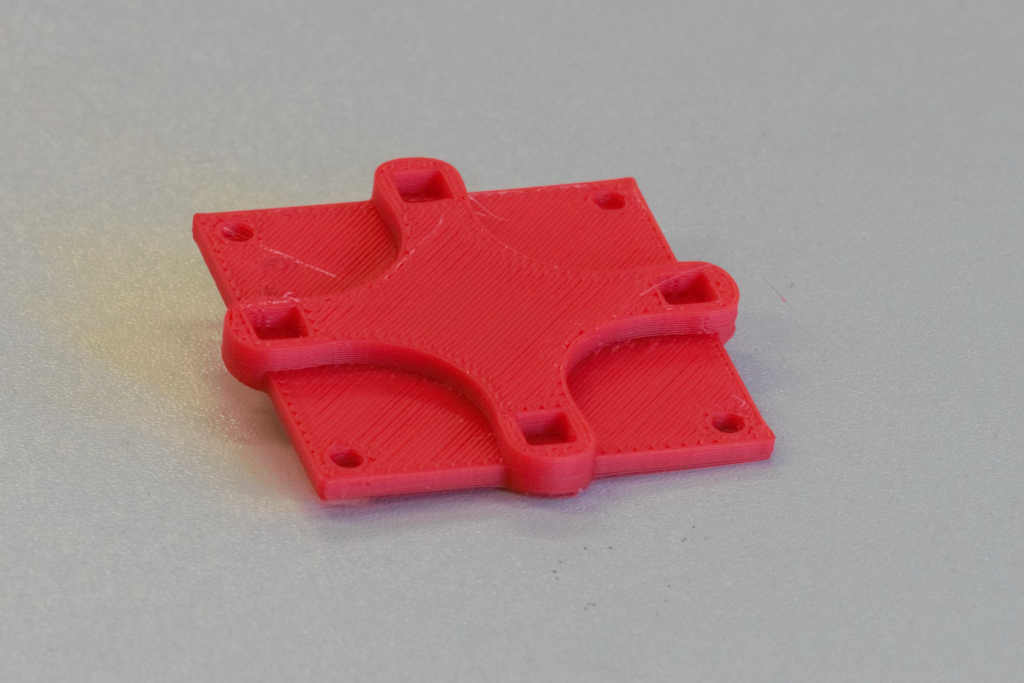
If the lever is too high it can happen that the main blocks get loose from each other. To prevent this I have designed small holders with which you can connect 2 blocks more stable together.
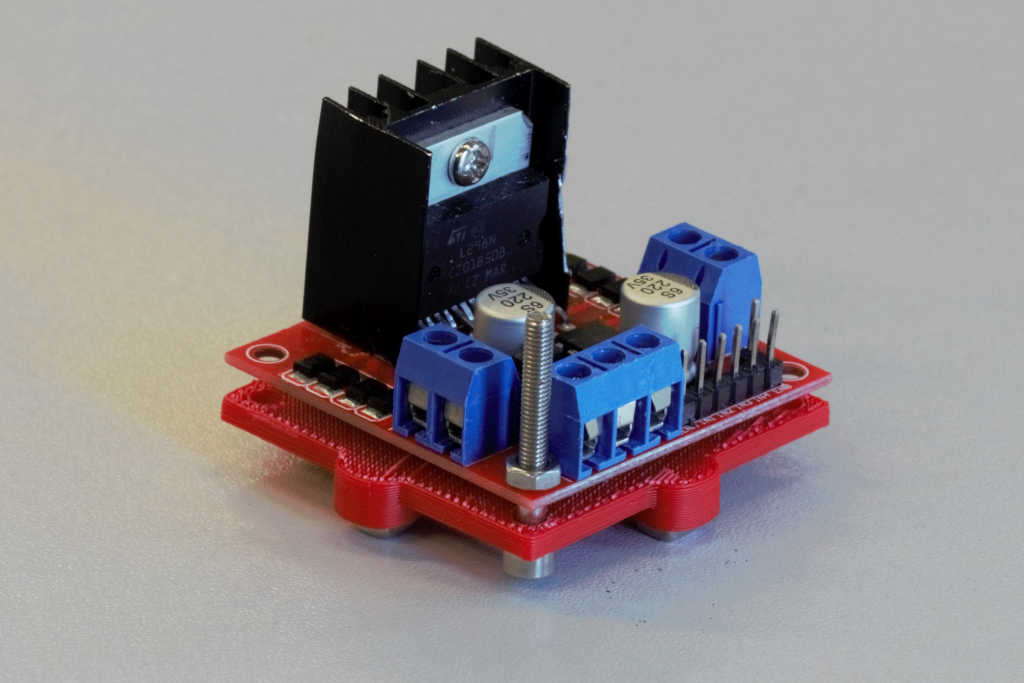
In order to control DC motors it is possible to use h-bridges to attach them to the robot, I have designed an adapter.
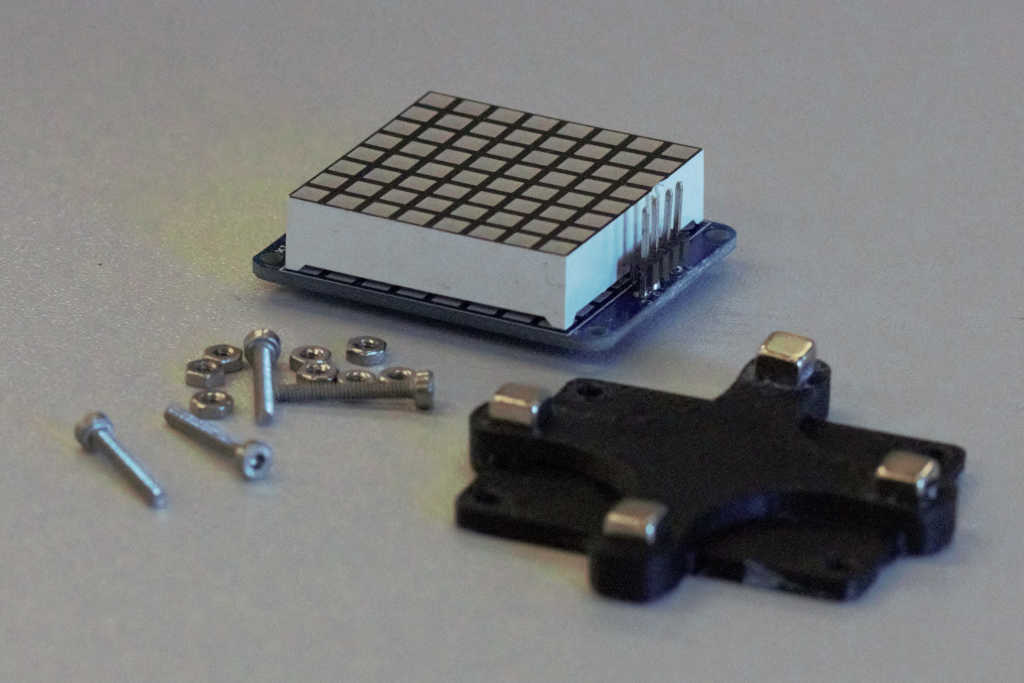
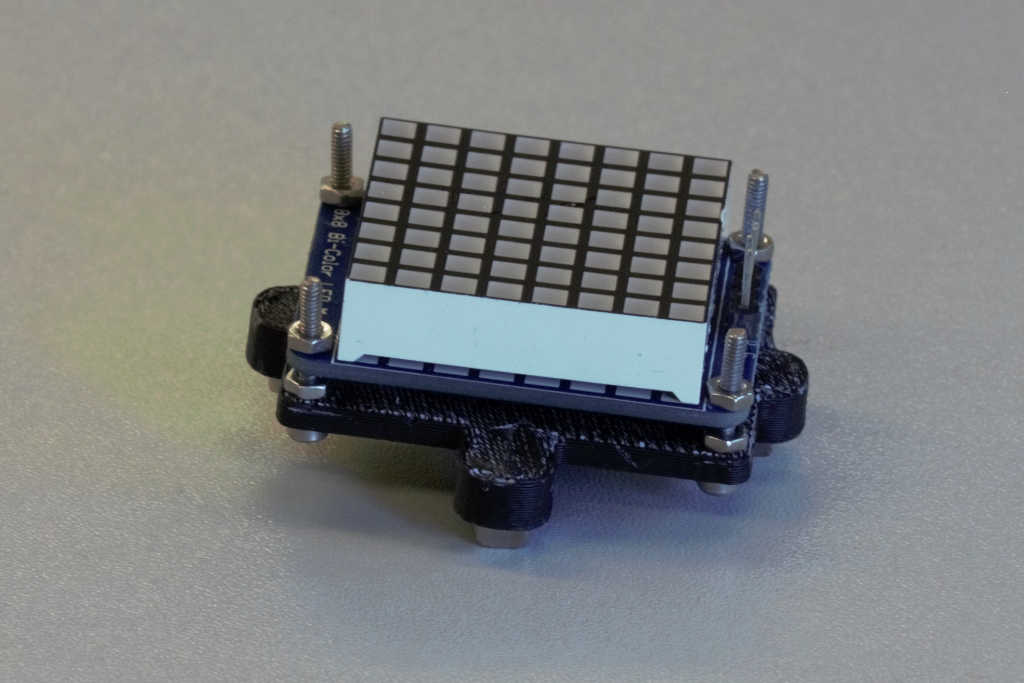
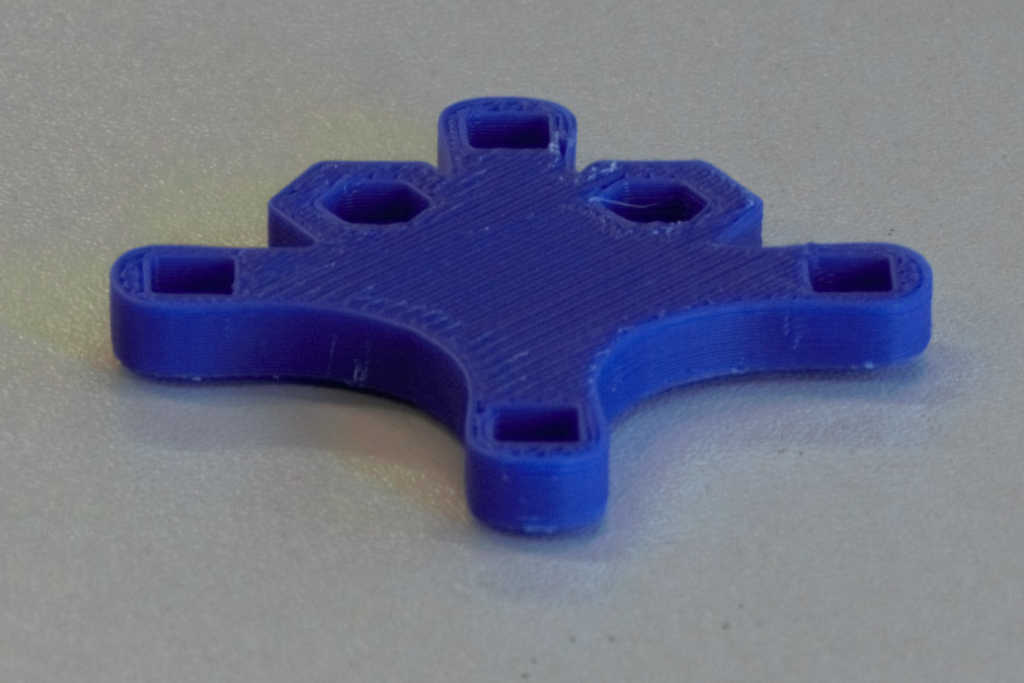
Since there are already a lot of electronics on the market and you don't have to reinvent the wheel all the time new, I simply created adapters for LED matrices that we still have in the lab.
Here I have simply created holders which can easily be attached to the side of a block with magnets. For a higher stability i have to reconsider this at a later time.
Similar to the LED matrix, I simply deseingt an adapter for the Oles.
If you just want to build a robot quickly, it is best to build one with 2 speakers so that it does not tip over, I have a movable ball deseigt.