第17周个人作业:智幻走马灯圆环 PCB 与 PCB 舱结构设计与制造
项目背景
本周我的主要时间都放在了我的 Fab Academy 2025 最终项目中的一个重要环节 —— 智幻走马灯控制板的设计和制造。在第 16 周,我进行了系统设计,修改了硬件方案。到了第17周,我需要设计一个全新的圆环形PCB(适合放置在灯笼的圆形齿轮箱上方)来控制整个系统,包括灯笼的旋转机构、LED灯效以及手势交互功能。这次的设计过程基本上通过和 Claude 沟通,在 AI 的指导下完成了整个过程(当然,绘制原理图和布线这些还得自己来)。完成 PCB 的设计后,我还用嘉立创 EDA 导出了 PCB 的模型,并在 Fusion 完成了 PCB 舱结构的设计。

智幻灯笼的 PCB 计划放在圆形齿轮箱的上方
设计需求分析
经过前面几周的折腾,我终于差不多搞清楚这块 PCB 到底需要什么功能了:
- 造型要求:必须是圆环形,我在 Fusion 里估算出 PCB 的外径92mm、内径22mm,这是因为要塞进灯笼的圆形齿轮舱的上面。
- 核心控制 MCU:用 Seeed Studio 的 XIAO ESP32C3,小巧且带 Wi-Fi ,功能够用。
- 感知系统:接3个APDS-9960手势传感器,这样才能360°无死角地接收手势命令。
- 灯光与动力:控制2条 14 灯珠的 RGB 灯带和 1个 Grove mini fan 电机驱动器控制的电机。
- 电源管理:最好是能自动在电池和 USB 之间切换,这个挺关键的。
- 未来扩展:把没用到的引脚引出,预留几个 Grove 接口,万一以后想加功能。
- 制造工艺:这次必须上双层板了,单层实在满足不了我的野心。
与 AI 沟通设计 PCB
首先,我向 Claude 提供了我认为尽可能详细的项目背景资料,包括基本外观规则、关键设计要求、APDS-9960 手势传感介绍资料、智幻走马灯的背景资料,当前项目进度和已解决与待解决的问题等,以及 XIAO ESP32C3 的引脚图,以及购买 LED 灯条网点的参数表截图内容。然后请 Claude 指导我使用 KiCad 绘制原理图和 PCB 设计。

让 Claude 指导我使用 KiCad 绘制原理图和 PCB 设计需要提供尽可能详细的背景信息
因为沟通的过程信息量很大,可以访问我分享的对话链接。
https://claude.ai/share/430d4652-be82-4899-aa72-39eb7a691ac2
下面的内容是根据最终完成的设计和制造过程进行整理,我依据 AI 提供的初稿,结合实际情况做了改写。
设计工具的纠结过程
一开始我用的是 KiCad 画原理图,但搞着搞着就转战嘉立创 EDA了。为啥呢?主要有这几点原因:
- 嘉立创的界面对我这种中文用户实在太友好了。
- 它家的元件库超级丰富,而且自带3D模型,不用自己找。
- 最爽的是可以直接从BOM表下单买元件,省去了到处找配件的麻烦。
- 设计完直接发给制造商,一条龙服务。
- 嘉立创 EDA 专业版是免费的,还提供在线版本,无需安装软件,用浏览器就可以进行从设计到制造的整个过程。
说实话,从 KiCad 迁移到嘉立创 EDA 的过程并不太平滑,但为了后面的便利还是值得的。而且一旦熟悉了原理图和 PCB 设计后,工具就渐渐变得不重要了。
| 比较项目 | KiCad | 嘉立创EDA |
|---|---|---|
| 开源性 | 完全开源 | 封闭平台 |
| 上手难度 | 较陡峭的学习曲线 | 对新手友好 |
| 元件库 | 需要自行寻找/创建 | 丰富且带3D模型 |
| 中文支持 | 有但不完善 | 原生支持 |
| 制造集成 | 需要导出Gerber | 一键下单生产 |
| 元件采购 | 分开处理 | 直接从 BOM 下单 |

开始用 KiCad 绘制的原理图

用嘉立创 EDA 绘制的原理图,整个过程都是在浏览器里进行的
原理图设计过程
核心模块设计
画原理图的时候,我得先搞定电源系统:
电池 ----> 二极管 ----> 开关 ----> V_BATT_PROTECTED 线路
USB 5V ----> 二极管 ----> V_BATT_PROTECTED 线路别看这个简单,里面有很多学问。 Claude 建议我用了 1N5822 肖特基二极管而不是普通二极管,因为它的压降低(只有0.4V左右),这意味着会浪费更少的电能。这对电池供电的设备来说可是省电的好办法!
另外,在 AI 的建议下还加了两个电容:一个 10μF 的电解电容和一个 0.1μF 的陶瓷电容。这两个电容就像一个电力的"蓄水池"和"过滤器"的组合 —— 大容量电解电容处理低频噪声,小容量陶瓷电容负责高频噪声。没有它们,电路里可能会出现各种莫名其妙的问题。

图3:电源管理电路原理图
Grove 接口连接方案
我打算把多余的引脚通过 Grove 接口方式引出,但怎么连线是个问题。最初 AI 给出的 Grove 接口引脚排列是VCC-GND-SIG1-SIG2,结果我研究了 Grove for Beginners 的 Grove 接口后,发现真正的顺序是SIG1-SIG2-VCC-GND!差点就接错了。AI 在一些细节的地方特别是背景资料没有说明的细节之处容易出错,要尤其小心。

我向 Claude 提供了一个满是 Grove 接口板子的参考图
输出控制接口
LED灯带用的是WS2812B芯片,又叫"内置驱动IC的智能RGB LED"。这东西只需要一根数据线就能控制一长串LED的颜色,省去了很多接线的麻烦。
小知识点:WS2812B的通信协议是单线归零码,时序要求比较严格。每个LED接收24位数据(RGB各8位)后,会将剩余信号传给下一个LED,从而实现级联控制。
PCB布局设计 - 有趣的转折
本来我计划做个完美的圆环形PCB,如下图所示,放在齿轮舱的上方。

结果等我拿到电池一看,发现这个大家伙根本放不进去!我用电池的长宽高尺寸在 Fusion 里做了一个占位模型(下图的红色部分),比划了半天,发现比较好的方式是充分利用齿轮舱的一半空间,如下图所示。

充分利用齿轮舱的一半空间是比较好的放置方案
我临时决定把圆环切掉一块,给电池腾地方。根据这个思路,我为齿轮箱设计了一个上盖,同时也作为 PCB 的支撑结构,并掏了一些孔以方便走线和降低用料量。Fusion 里的效果如下图所示。

为齿轮箱加了一个缺掉一块的圆形盖子同时也作为 PCB 的支撑结构,
于是。这就是为什么 PCB 的设计看起来像个"缺了一口的月饼",我先按自己的理解将元件摆放的尽量合理。

PCB布局3D效果图
布局时我遵循了几个原则:
- XIAO ESP32C3放在顶部,这样程序上传接口容易够到
- 三个手势传感器接口尽量均匀分布,覆盖不同方向
- 电源管理元件集中在一起,避免干扰其他电路
说到布局,有个实用技巧:先布大件,再布小件。先确定那些位置受限或固定的元件(比如连接器、大型元件),然后再布置那些位置灵活的小元件(如电阻、电容)。
走线策略 - 双层板的奥秘
这次尝试了双层板,比起单层板,自由度高了不少。我的布线策略如下:
- 顶层:主要走电源线和重要信号线,用粗线 1.0mm 走电源
- 底层:绝大部分做成GND平面,提供低阻抗的接地路径
- 过孔:适当添加过孔,连接顶层GND和底层地平面
走线时的个人心得:
"别小看走线这活儿,感觉门道很多!弯线最好用45°角,不要90°直角;信号线尽量不要并行太长,否则可能互相干扰;高速信号尽量短而直接;电源和地之间一定要加足够的去耦电容。这些小细节决定了板子做出来后是否稳定可靠。"
走线可能是我 PCB 设计里花时间最多的过程,很多细节要做多次尝试才能找到合适的解决方案。 
最终完成的 PCB 板设计,我加了些支撑固定孔

设计完成后的 PCB 板的 3D 效果图
嘉立创的 EDA 还允许导出 3D 模型为 obj 文件,如下图所。
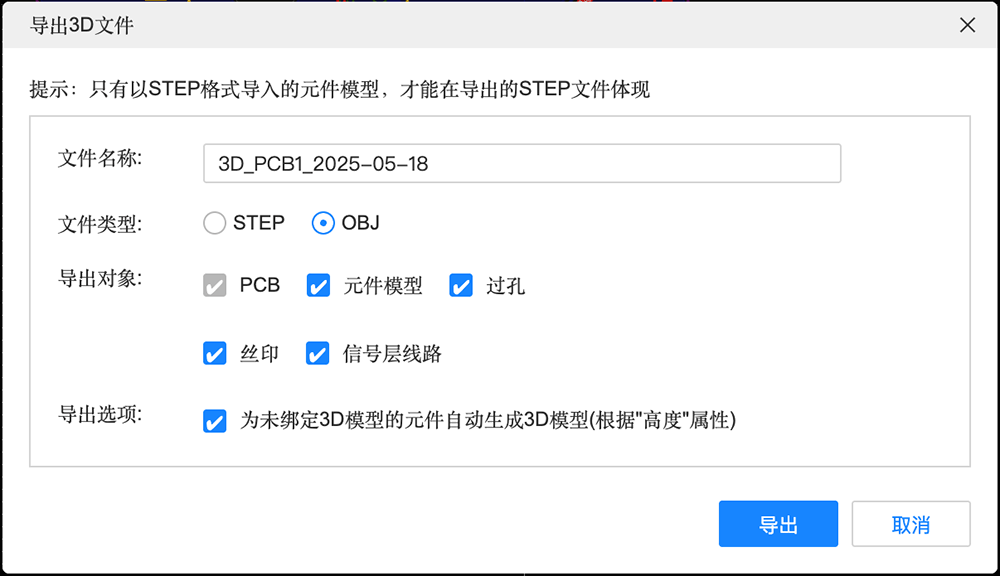
导出 3D 文件里支持导出 OBJ 模型的选项
在 Fusion 我可以通过设计界面的 实体/插入/插入网格 来导入 OBJ 文件,这样我就可以在我的设计中看到 PCB 部分的实际 3D 效果。

将导入的 PCB 模型放入到现在的结构中来,可以帮助评估 PCB 和结构的
元件选择与订购 - 淘宝工程师上线
作为资深"淘宝工程师",元件选购现在也变成了我的的“强项”。以下是我的一些选择和思考:
肖特基二极管(1N5822)
这货看着不起眼,其实很重要。选它是因为:
- 正向压降低,只有0.4V左右,比普通二极管的0.7V省电多了
- 3A的电流能力,远超我系统需要的0.5A,有足够余量
- 响应速度快,适合保护电路
电容选择
我在电容选择上纠结了好久:
- 电解电容要低ESR(等效串联电阻)的,这样滤波效果才好
- 陶瓷电容选了Y5V介质,虽然不如X7R稳定,但价格便宜,基本够用
连接器
- 用了JST-SH兼容的1.0T-4P立贴,这种小巧精致的连接器很适合手势传感器
- LED灯带和Grove接口用了更常见的PH2.0系列接口
导出 BOM 表
嘉立创 EDA 导出 BOM 表的时候,提供了“元件下单”功能,如下图所示。

嘉立创 EDA 导出 BOM 表时的“元件下单”功能按钮位置
接下来可以选择采购套数,我准备采购 3 套(如果时间允许,我想制造 3 只灯笼)。

直接输入采购套数,因为我对元件品牌还完全没有太多认知,就没有展开选择
在 BOM 配单页面,可以选择需要哪些物料。我去掉了 XIAO ESP32C3 和 Grove 接口(手头有)。
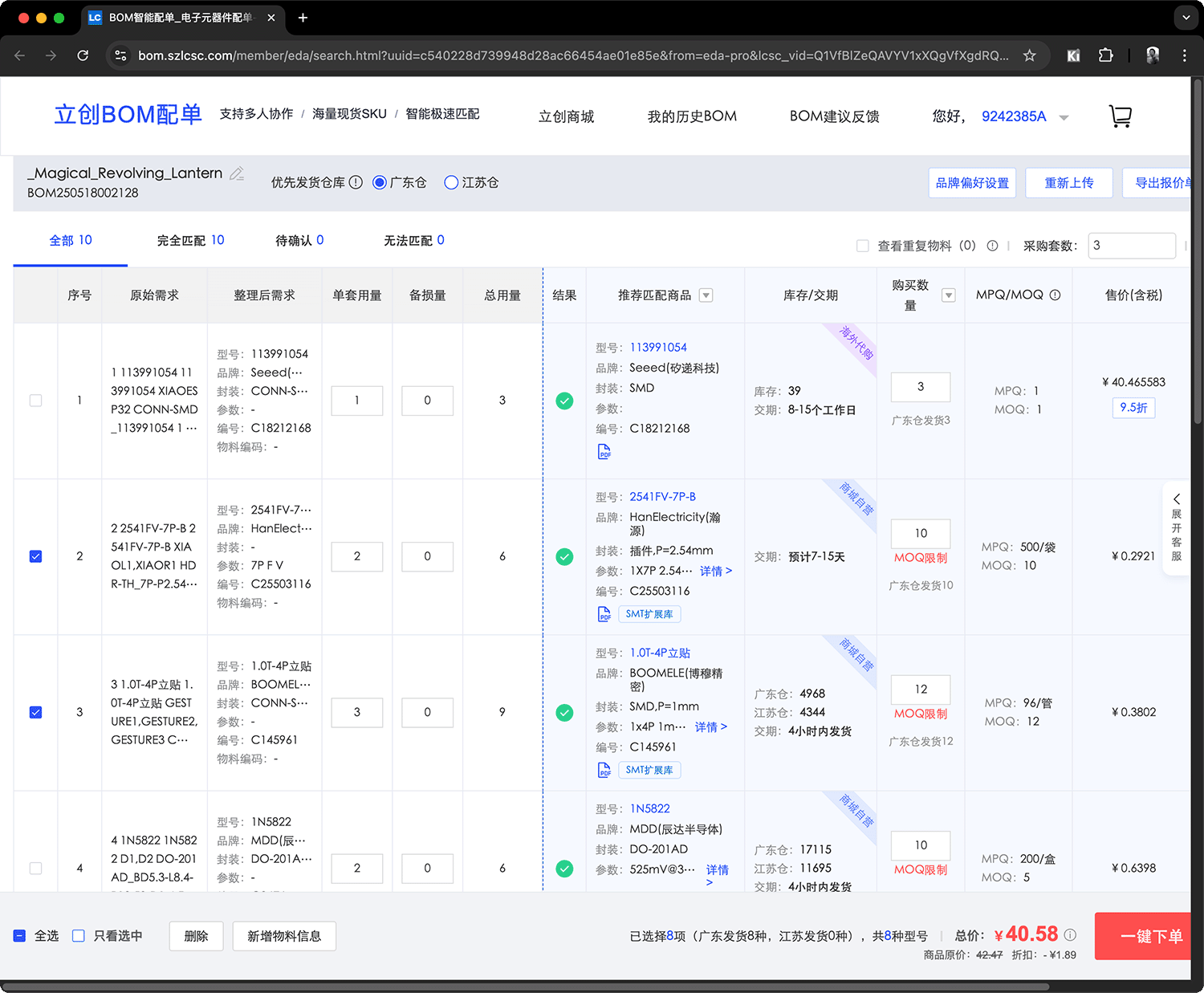
最终所有需要的元件总共才花了32.13元!还包邮!选择了广东仓发货,第二天元件就到手了,效率简直感人。下图中的订单中的数量,全部都按最低起订数量下单。
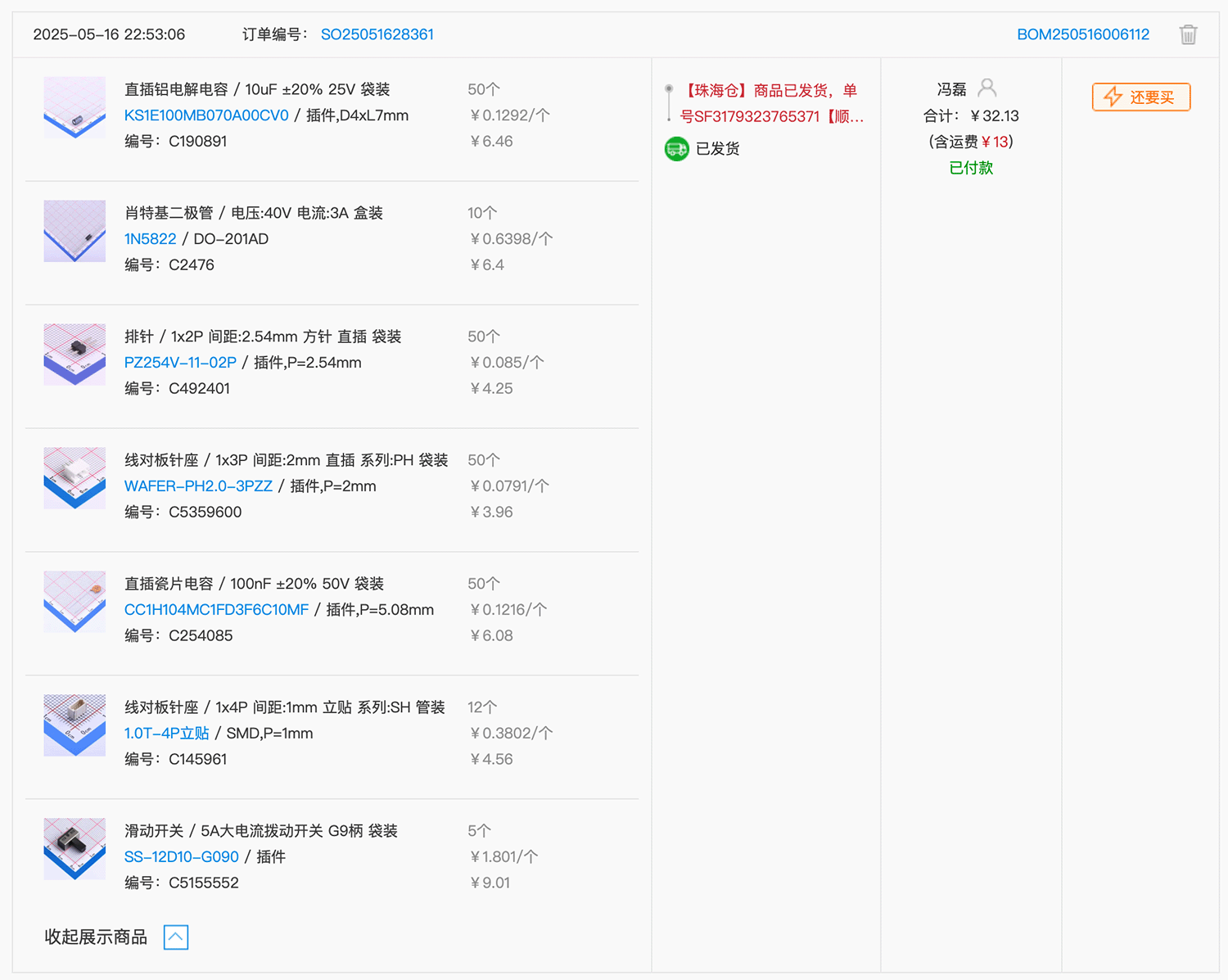
图6:元件订单截图


收到的元件都按袋分装,倒出来查看拍照
PCB制造 - 意外的惊喜
提交PCB制造订单时,发生了一个意外惊喜。这块双层板,比我之前做的单层板还便宜!只花了33元就拿下了5片PCB。
仔细研究后发现,原来我第一版选了"无铅喷锡"这个非标准工艺。这次选了普通的"有铅喷锡",便宜多了。
制造工艺小知识:普通的有铅喷锡工艺完全能满足个人项目需求,而且成本低。无铅工艺主要是为了满足环保要求,对于原型开发阶段小批量制造来说可以先不考虑。

PCB制造订单截图
剩余部分结构设计
这部分花了 1 天多时间,在 Fusion 逐步完成了 PCB 舱和手势传感器支架部分的设计,然后用 3D 打印输出了结构进行了测试。

在 Fusion 逐步完成了 PCB 舱和手势传感器支架部分的设计
3D 打印了 PCB 舱和手势传感器支架,3 个主结构直接通过嵌套方式就可以很紧实的连接在一起。

3D 打印后 3 个结构舱通过嵌套就可以很紧实的连接在一起,和外框和旋转机构组合在一起后,整个结构主体部分的工作就全部完成了
现在就差 PCB 了。
遇到的坑和解决方案
说实话,这个过程也不是一帆风顺的,遇到了不少坑:
- 电流估算不足
- 问题:低估了LED灯带的电流需求
- 解决:重新计算了全亮时的最大电流(约0.5A),选了更大容量的二极管和开关
- 空间布局挑战
- 问题:电池太大,标准圆环放不下
- 解决:修改PCB形状,切掉一部分给电池留位置
我的经验是:遇到问题不要慌,先仔细分析,和 AI 沟通要充分告知背景资料,以便得到有价值的指导。
一些个人心得和建议
作为一个PCB设计新手,这个项目让我学到了不少东西,分享几点心得:
- 工具不重要,重要的是理解基本原理
- 无论用KiCad还是嘉立创EDA,电路原理是通用的
- 双层板真的比单层板好用太多
- 布线更灵活,信号质量更好,强烈推荐新手直接从双层板开始学
- 国产工具和服务生态已经很成熟了
- 嘉立创EDA + 嘉立创制造 + 嘉速电子元件,这一条龙服务真的很香
- 纸上谈兵不如实际动手
- 再多理论知识也比不上亲手设计一块板子,遇到问题解决问题
后续工作计划
PCB弄好只是第一步,接下来我还要:
- 把所有元件焊接到板子上
- 编写控制固件,测试每个功能模块
- 将PCB整合到灯笼的机械结构中
- 进行整体系统测试
- 灯笼转笼贴片设计安装
- 编写文档
希望再有一周,能看到这个智幻走马灯完美运转起来!
PS: 有啥问题或建议,欢迎随时交流!我这个项目的所有资料都会开源分享,希望对其他maker有所帮助!