第 4 周个人作业:基于 XIAO MG24 的嵌入式开发实践
对于我的智幻走马灯最终项目,我想尝试较新推出的 XIAO MG24 Sense,这个拇指大小的开发板上整合了基于 Silicon Labs EFR32MG24 SoC 的超低功耗无线开发板,采用高性能78MHz ARM Cortex®-M33内核,板载模拟麦克风和六轴IMU传感器,让我的智幻走马灯在功能上有了很多想象空间。而价格只有不到 11 美元。
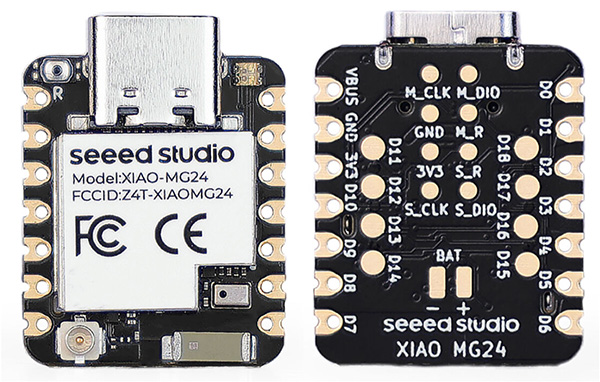
XIAO MG24 Sense 的正面和背面
一、微控制器数据手册分析
Seeed Studio 提供的 Datashee 是 EFR32MG24 系列无线 SoC 的数据手册,由 Silicon Labs 发布,主要面向物联网无线连接应用。文档详细描述了产品的核心特性,如32位ARM Cortex-M33处理器、2.4GHz高性能无线收发器、低功耗设计以及安全功能(包括Secure Vault和AI/ML硬件加速器)。此外,文档还涵盖了产品的功能列表、订购信息、系统架构、无线电设计、各类外围接口(如GPIO、USART、I2C等)、时钟与电源管理、引脚定义以及封装规格,为工程师提供了完整的技术参数和应用指导,帮助他们在无线通信和物联网设备设计中做出最佳选择。
手册第一页展示了 EFR32MG24 芯片的整体架构图,如下图所示。
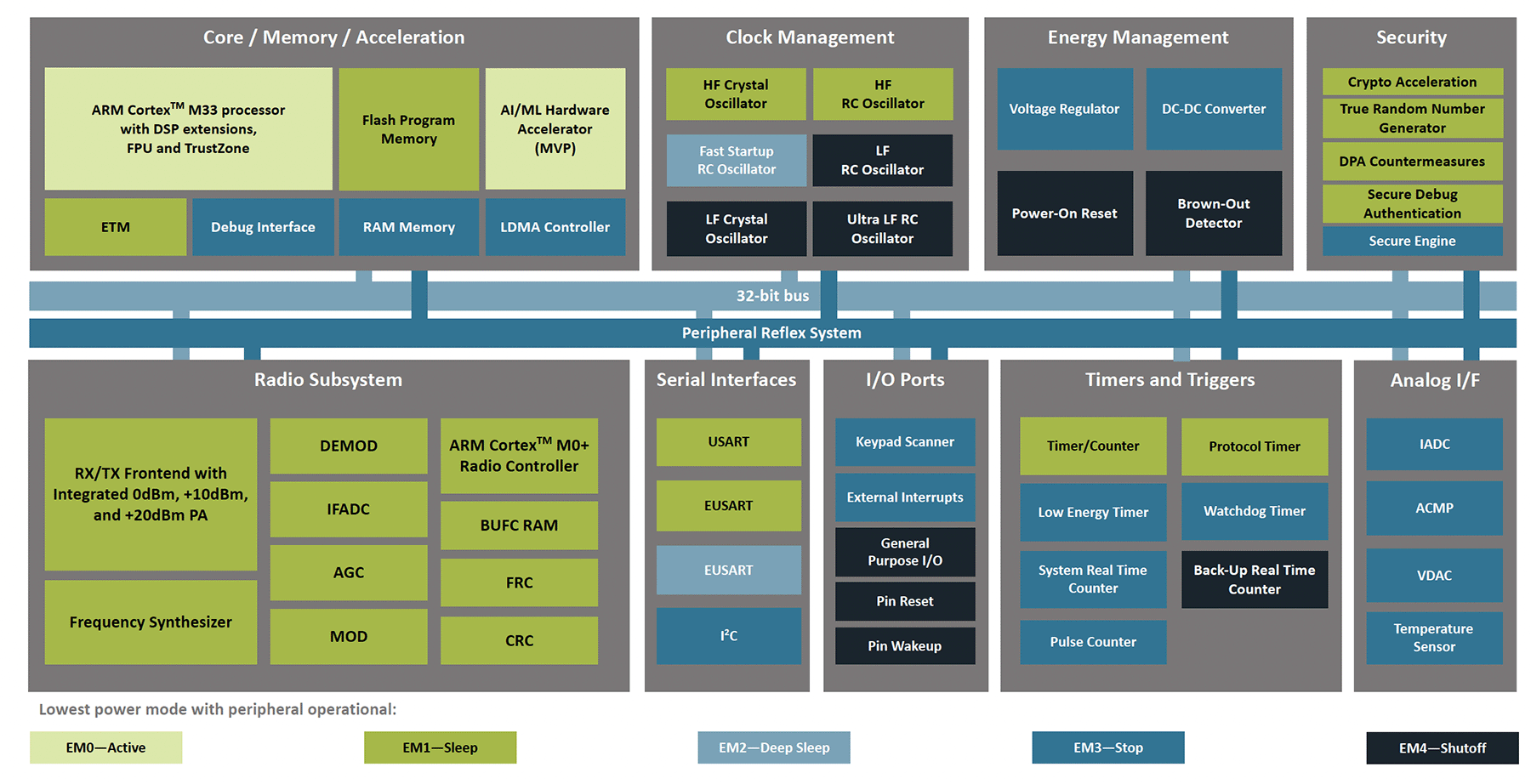
EFR32MG24 芯片的整体架构图
其核心组件可分为以下几个主要部分:
核心系统部分(左上)
- 采用ARM Cortex-M33处理器,支持DSP扩展、FPU浮点运算单元和 TrustZone 安全特性。
- 包含Flash程序存储器、RAM内存和LDMA直接内存访问控制器。
- 集成了AI/ML硬件加速器(MVP)用于机器学习加速。
- 提供ETM和调试接口便于开发调试。
时钟管理系统(中上)
提供多种时钟源选项:
- 高频晶振和RC振荡器。
- 快速启动RC振荡器。
- 低频晶振和RC振荡器。
- 超低频RC振荡器。
能源管理系统(右上)
- 电压调节器。
- DC-DC转换器。
- 上电复位。
- 欠压检测器。
安全功能(最右)
- 加密加速器。
- 真随机数生成器。
- DPA防护措施。
- 安全调试认证。
- 安全引擎。
底部外设系统
- 无线电子系统:包括发射接收前端、数字解调等。
- 串行接口:USART、EUSART等通信接口。
- I/O端口:支持键盘扫描、外部中断等。
- 定时器系统:多种定时器和计数器。
- 模拟接口:ADC、比较器等模拟外设。
该芯片支持5种能耗模式(底部):
EM0(活动)→ EM1(休眠)→ EM2(深度休眠)→ EM3(停止)→ EM4(关断),能耗逐级降低。
所有这些模块通过32位总线和外设反射系统互联,形成了一个完整的低功耗无线系统芯片解决方案。
我重点了解了下面几个部分的内容。
芯片概览
EFR32MG24系列芯片的核心是ARM® Cortex®-M33处理器,最高运行频率可达78 MHz。该处理器具备数字信号处理(DSP)指令集、浮点运算单元(FPU)和TrustZone安全技术,确保了高效的数据处理能力和系统安全性。芯片内置高达1536 kB的闪存和256 kB的RAM,为复杂的物联网应用提供了充足的存储空间。
无线通信能力
该系列芯片的无线模块支持2.4 GHz频段,具备高性能的无线电收发器,支持多种无线协议,包括Matter、OpenThread、Zigbee、Bluetooth Low Energy等。芯片的无线电部分具备高灵敏度和高输出功率,确保了在各种环境下的稳定通信。例如,其接收灵敏度可达-105.4 dBm(250 kbps O-QPSK),而输出功率最高可达+19.5 dBm。
低功耗设计
EFR32MG24系列芯片在设计上特别注重低功耗,具备多种低功耗模式,以适应不同的应用场景。在EM0模式下,芯片的电流消耗仅为33.4 µA/MHz;而在EM4模式下,电流消耗可低至0.25 µA。这种低功耗特性使得芯片非常适合电池供电的设备,延长了设备的使用寿命。
安全特性
安全是EFR32MG24系列芯片的一大亮点。芯片内置了Secure Vault安全模块,提供了包括硬件加密加速器、真随机数生成器(TRNG)、安全启动(Secure Boot)和安全调试(Secure Debug)等功能。这些安全特性确保了设备在面对远程和本地网络攻击时的防护能力。
外围接口与功能
EFR32MG24系列芯片提供了丰富的外围接口,包括GPIO、USART、EUSART、I2C、定时器等,支持多种通信协议和功能。例如,芯片的GPIO引脚具备多种功能,包括输入、输出、开漏配置和 glitch filtering。此外,芯片还集成了模拟比较器(ACMP)、数模转换器(VDAC)和模数转换器(IADC),满足了各种模拟信号处理的需求。
XIAO MG24 Sense 的 Wiki 文档
Seeed Studio 随产品提供的 XIAO MG24 Sense Wiki 文档,可以帮助用户快速了解产品如何使用。
Wiki 文档中的 XIAO MG24 Sense 功能模块示意图如下图所示:
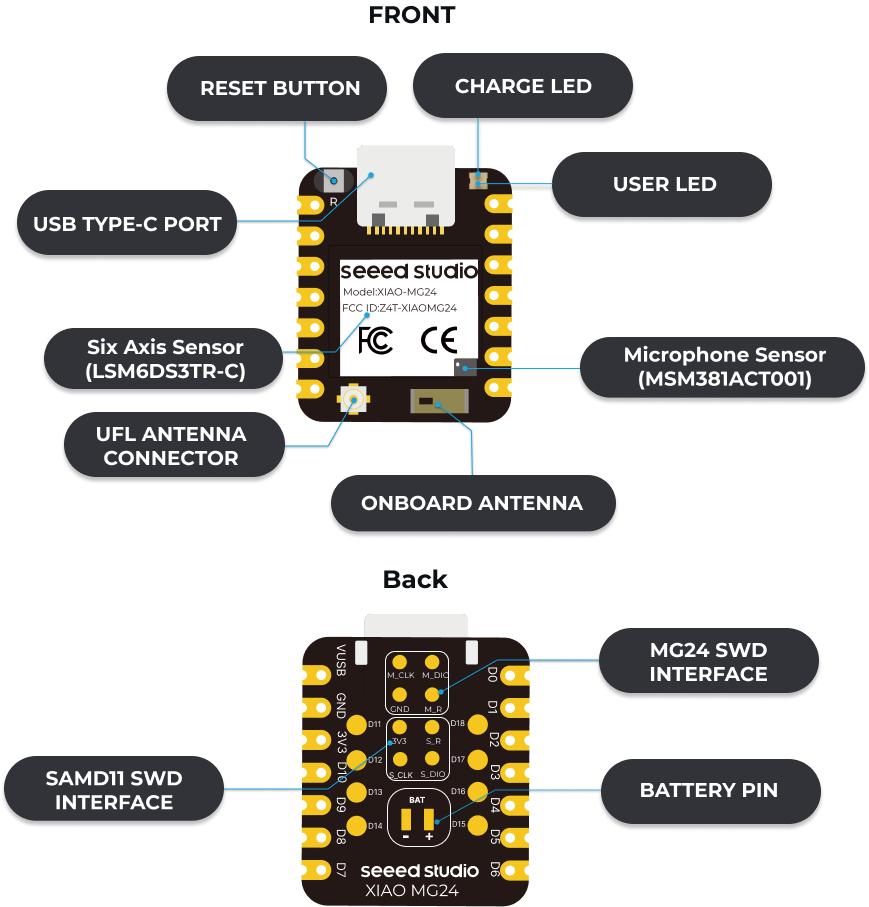
XIAO MG24 Sense indication diagram
XIAO MG24 Sense 的引脚图如下图所示:
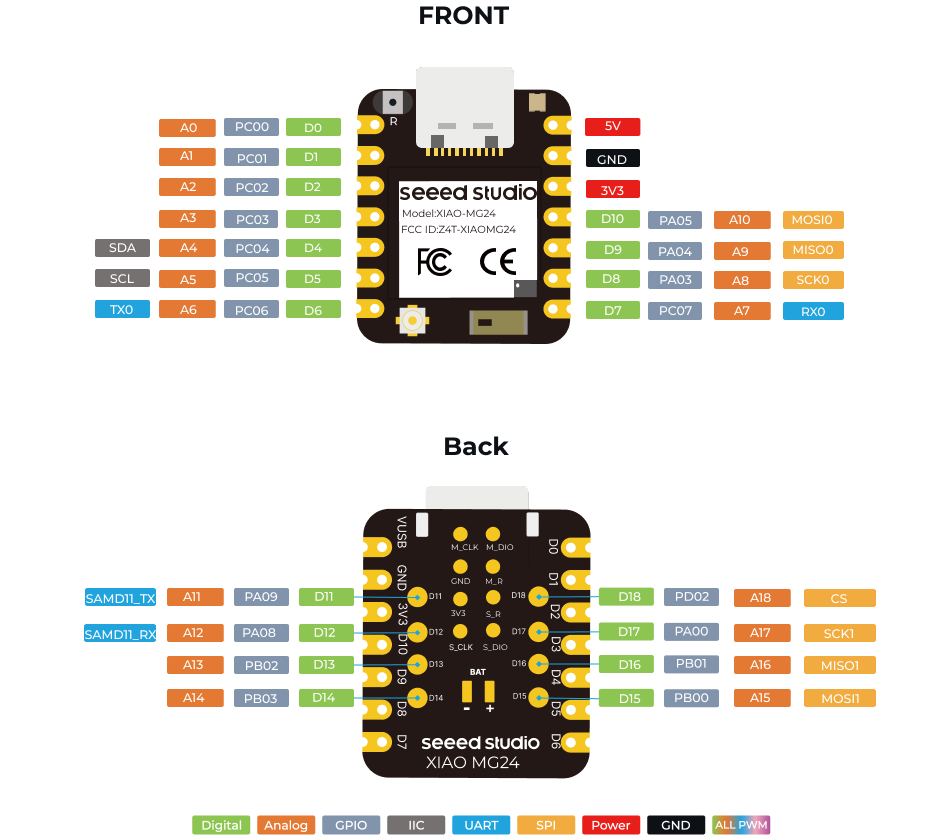
XIAO MG24(Sense) Pin List
XIAO MG24 Sense 基本功能测试
这个板子对我来说也比较陌生,所以我想测试一下其基本功能,通常会从 Blink 开始(让板子上的 USER LED 闪烁),以此了解和测试整个开发环境可用。另外我还想探究板载的六轴加速度计,想看看如何读取加速度数据到串口监视器。
XIAO MG24 Sense 的 Blink 教程
XIAO MG24 Sense 的 Wiki 文档提供了 Blink 的教程,我按照自己的操作习惯重新整理这个过程。
一、硬件和软件准备
1.硬件准备
- XIAO MG24 Sense 开发板 × 1
- USB Type-C 数据线 ×1
- 电脑 ×1
2. 软件准备
- Arduino IDE:确保已下载并安装最新版本(推荐使用 v2.0 或以上版本)。
二、设置开发板支持
1.打开 Arduino IDE
启动 Arduino IDE,确保软件已正确安装。
2.添加开发板支持
- Step 1:打开开发板管理器
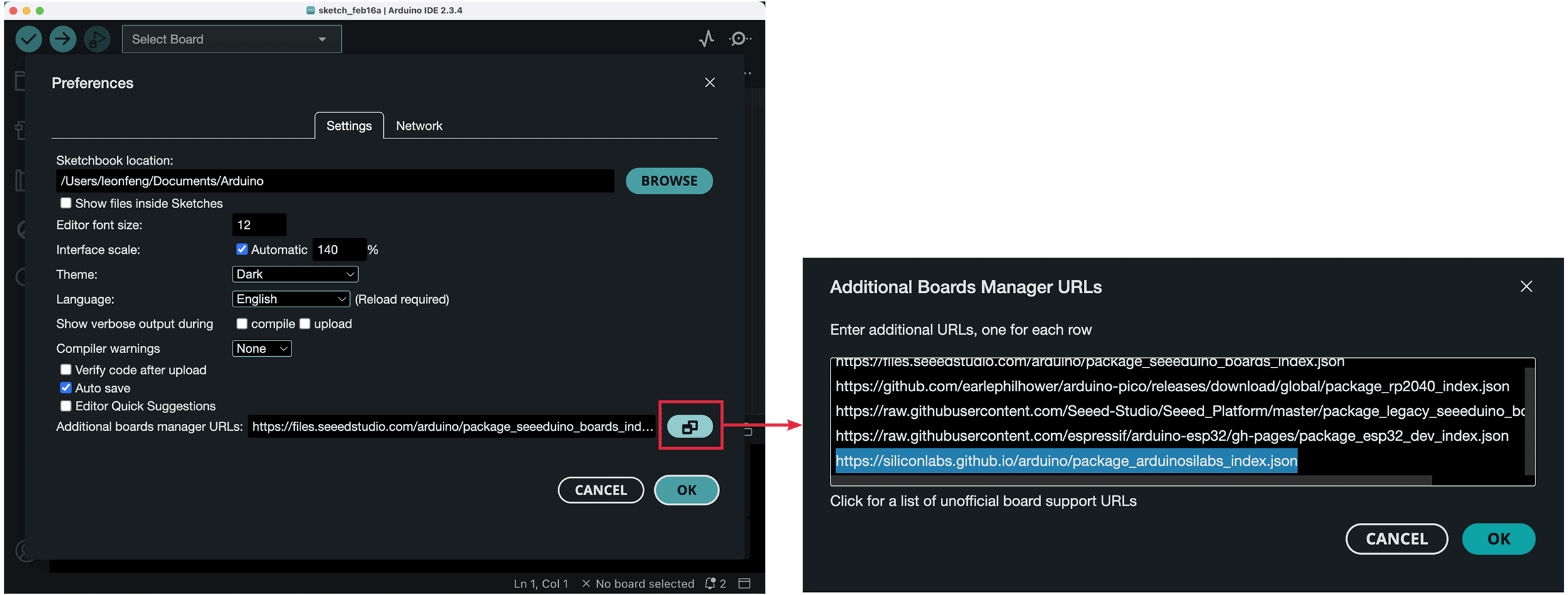
依次点击 文件 (File) →首选项 (Preferences),在 额外开发板管理器网址 (Additional Boards Manager URLs) 字段中,粘贴以下网址:
https://siliconlabs.github.io/arduino/package_arduinosilabs_index.json。 如果你需要经常对多个开发板编程,可以点击网址右侧的  图标,在弹出的窗口中,将开发板管理器网址添加在最下方,如下图所示。
图标,在弹出的窗口中,将开发板管理器网址添加在最下方,如下图所示。
点击 确定 (OK) 保存设置。
在 Arduino IDE 中添加开发板支持
- Step 2:安装开发板包
- 依次点击
工具(Tools) →开发板(Board) →开发板管理器(Boards Manager)。 - 在搜索框中输入 XIAO MG24 进行搜索。
- 找到 Arduino Silicon Labs Boards by Silicon Labs,点击
安装(Install) 按钮进行安装,如下图所示。 - 安装完成后,关闭开发板管理器。
- 依次点击
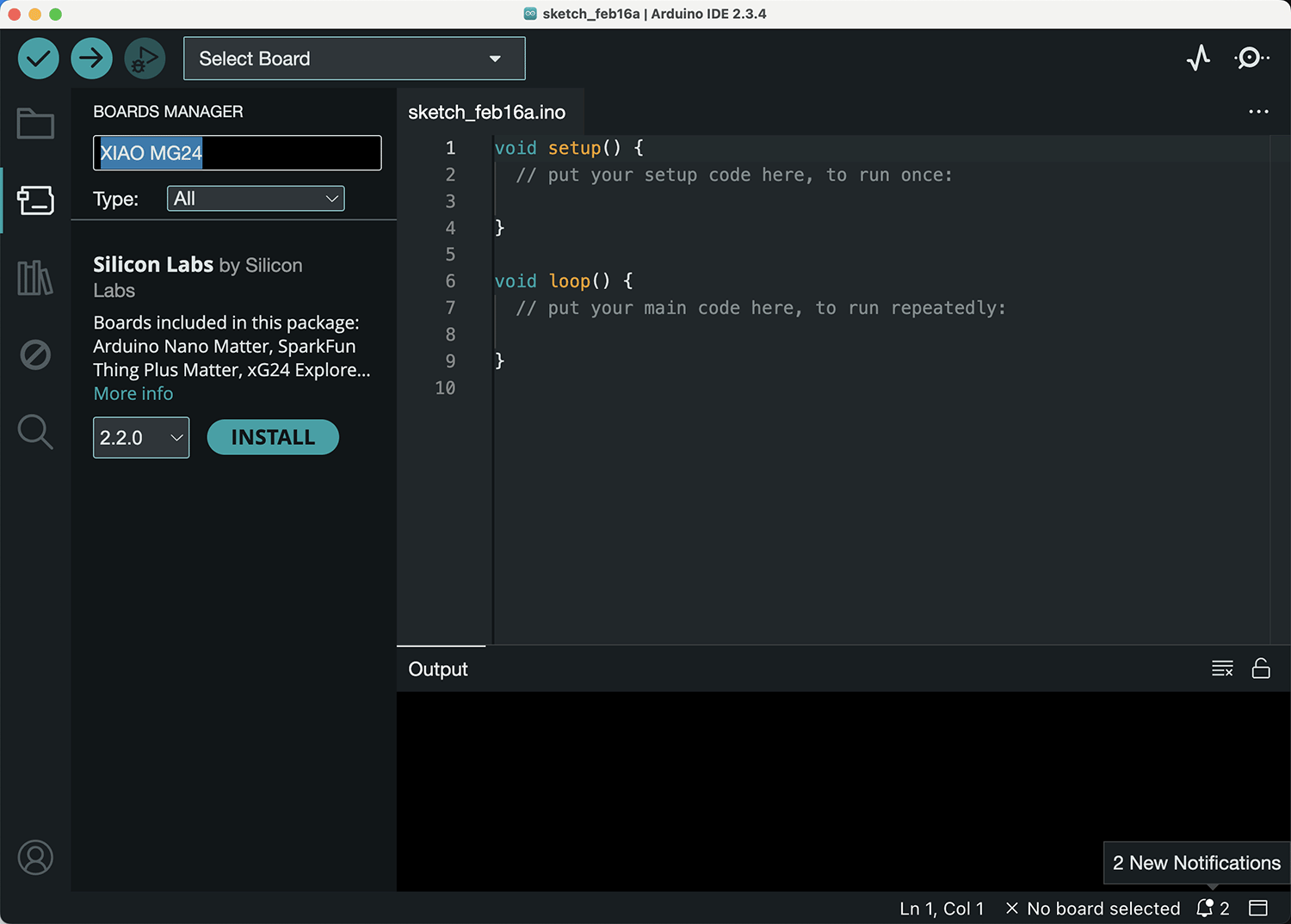
成功添加开发板支持后,在开发板管理的搜索框输入 XIAO MG24,就可以搜到安装包了
3.选择开发板
- 依次点击:
工具(Tools) →开发板(Board) →Silicon Labs Boards→XIAO MG24。此时如果直接连接将 XIAO MG24 通过 Type-C 和电脑连接,会自动选择 XIAO MG24 开发板,如下图所示。
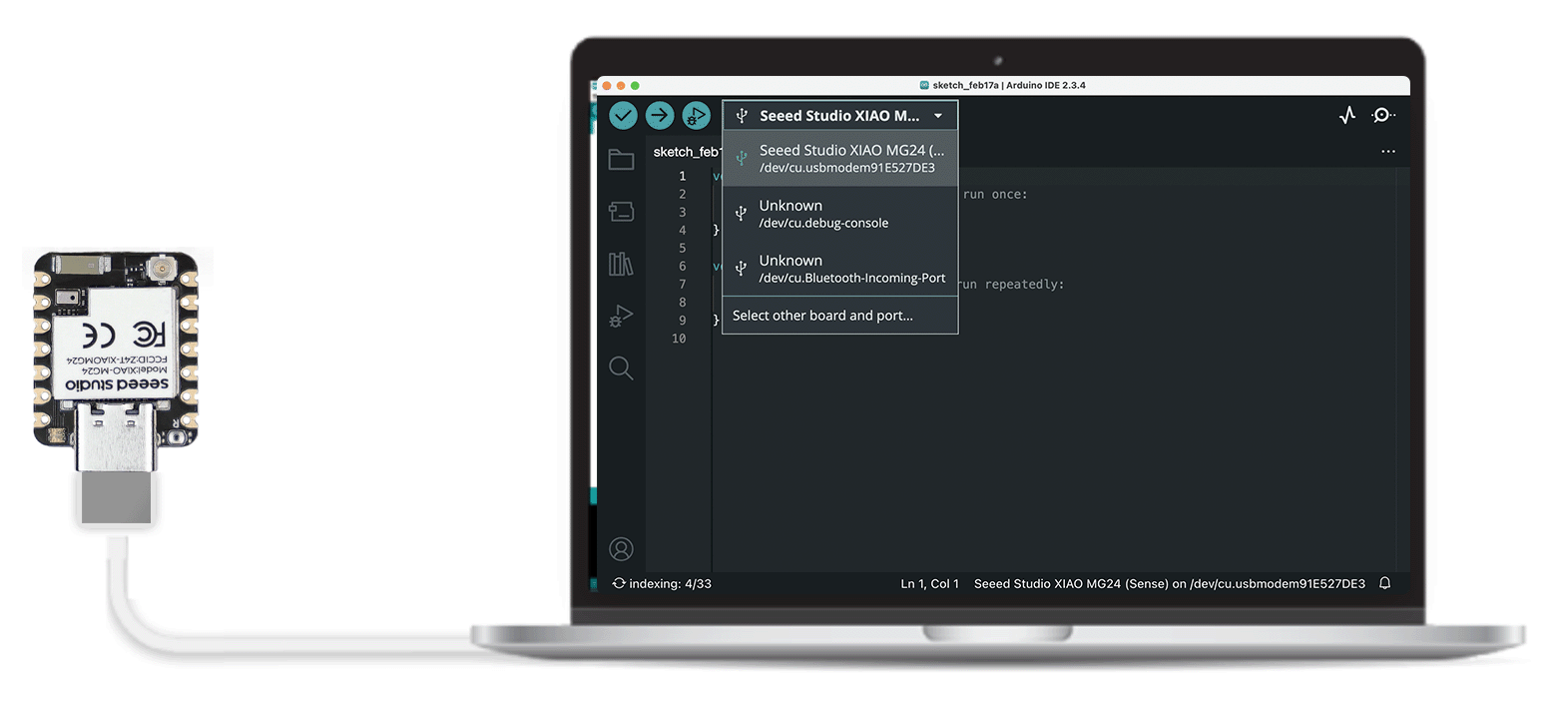
成功安装开发包后,连接 XIAO MG24 到电脑,Arduino IDE 会自动识别并选择 XIAO MG24 开发板
三、编译和上传 Blink 代码
1.打开 Blink 示例代码
- 依次点击:
文件(File) →示例(Examples) →01.基本示例(01.Basics) →Blink。开启路径如下图所示。
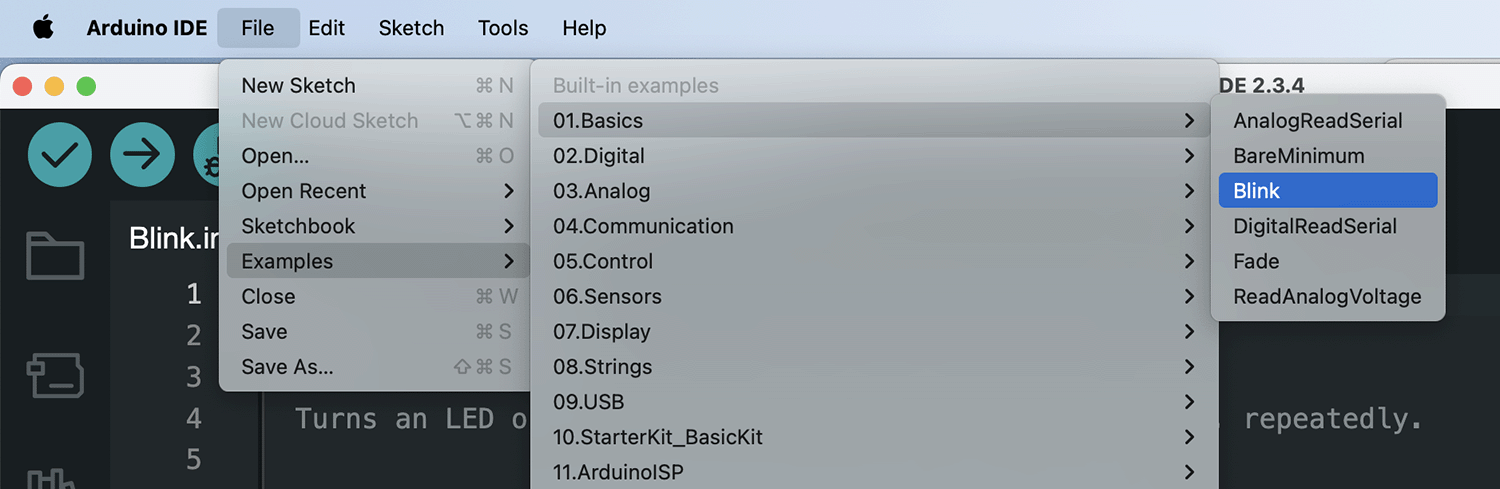
打开 Blink 示例程序的路径
Blink 程序如下所:
/*
Blink
Turns an LED on for one second, then off for one second, repeatedly.
Most Arduinos have an on-board LED you can control. On the UNO, MEGA and ZERO
it is attached to digital pin 13, on MKR1000 on pin 6. LED_BUILTIN is set to
the correct LED pin independent of which board is used.
If you want to know what pin the on-board LED is connected to on your Arduino
model, check the Technical Specs of your board at:
https://www.arduino.cc/en/Main/Products
modified 8 May 2014
by Scott Fitzgerald
modified 2 Sep 2016
by Arturo Guadalupi
modified 8 Sep 2016
by Colby Newman
This example code is in the public domain.
https://www.arduino.cc/en/Tutorial/BuiltInExamples/Blink
*/
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}2. 配置端口
- 确保 XIAO MG24 Sense 已通过 USB Type-C 数据线连接到电脑。
- 依次点击:
工具(Tools) →端口(Port),选择与 XIAO MG24 Sense 对应的端口。查看连接端口是否正确,如果不正确,则需手动选择,Windows 系统串行端口显示为“COM+数字”。而在 macOS 或者 Linux 系统中,串口名称一般为“/dev/tty.usbmodem+数字”或“ /dev/cu.usbmodem+数字”。
3. 上传代码
- 点击

上传(Upload) 按钮(右侧的箭头图标)或按下快捷键Ctrl+U,将代码上传到 XIAO MG24 Sense。
四、观察结果
- 上传成功后,XIAO MG24 Sense 板子上的
LED 指示灯会开始闪烁,通常是以 1 秒为周期闪烁。如果看到指示灯闪烁,就表示成功点亮了!

XIAO MG24 Sense 的 Blink 效果
- 如果没有看到指示灯闪烁,可以检查以下几点:
- 确保开发板已正确连接到电脑,并且选择了正确的端口。
- 确保安装了正确的开发板支持包。
- 尝试重新上传代码。
XIAO MG24 Sense 的 IMU 测试教程
Marcelo Rovai 教授在 Anomaly Detection & Motion Classification 文档介绍了一个类似的开发板 Seeed Studio XIAO nRF52840 Sense 如何进行 IMU 测试,并提供了一个测试代码:https://github.com/Mjrovai/Seeed-XIAO-BLE-Sense/blob/main/xiao_test_IMU/xiao_test_IMU.ino。
修改 IMU 测试程序
这个代码对于 XIAO MG24 Sense 的 IMU 并不合适,主要原因是:
IMU 型号差异:
- XIAO nRF52840 Sense 使用的是 LSM9DS1 传感器
- XIAO MG24 Sense 使用的是 LSM6DS3TR-C 传感器
- 这两种传感器虽然都属于 LSM 系列,但硬件特性和接口不同
软件库差异:
- XIAO nRF52840 Sense 使用 Seeed Arduino LSM9DS1 库
- XIAO MG24 Sense 需要使用 Seeed_Arduino_LSM6DS3 库
- 两个库的 API 接口和初始化方式有所不同
功能支持范围:
- LSM9DS1 支持加速度计、陀螺仪和温度测量
- LSM6DS3TR-C 主要支持加速度计和陀螺仪功能
- 因此需要移除温度相关的测试代码
根据这些差异,我修改了测试程序如下:
#include "LSM6DS3.h"
#include "Wire.h"
LSM6DS3 myIMU(I2C_MODE, 0x6A); //I2C device address 0x6A
char cmd = ' '; // 使用单个字符来存储命令
void setup() {
Wire.begin();
Serial.begin(115200);
delay(1000);
if (myIMU.begin() != 0) {
Serial.println("Device error");
} else {
Serial.println("Device OK!");
}
Serial.println("\nAvailable commands:");
Serial.println("a - display accelerometer readings");
Serial.println("g - display gyroscope readings");
Serial.println("s - stop readings");
}
void loop() {
if (Serial.available()) {
cmd = Serial.read();
}
if (cmd == 'a') {
// 加速度计数据
float x = myIMU.readFloatAccelX();
float y = myIMU.readFloatAccelY();
float z = myIMU.readFloatAccelZ();
Serial.print(x);
Serial.print("\t"); // 使用制表符分隔
Serial.print(y);
Serial.print("\t");
Serial.println(z);
}
else if (cmd == 'g') {
// 陀螺仪数据
float x = myIMU.readFloatGyroX();
float y = myIMU.readFloatGyroY();
float z = myIMU.readFloatGyroZ();
Serial.print(x);
Serial.print("\t");
Serial.print(y);
Serial.print("\t");
Serial.println(z);
}
else if (cmd == 's') {
cmd = ' '; // 停止输出
}
delay(100); // 100ms 采样间隔
}安装 Seeed_Arduino_LSM6DS3 库
要运行上面的测试程序,需要安装 Seeed_Arduino_LSM6DS3 库,安装库有两种方法:
- 通过 Arduino IDE 库管理器安装:
- 打开 Arduino IDE
- 点击菜单栏:工具 -> 管理库
- 在搜索框中输入 "Seeed LSM6DS3"
- 找到 "Seeed Arduino LSM6DS3" 库
- 点击 "安装" 按钮
下图是安装成功后的状态。
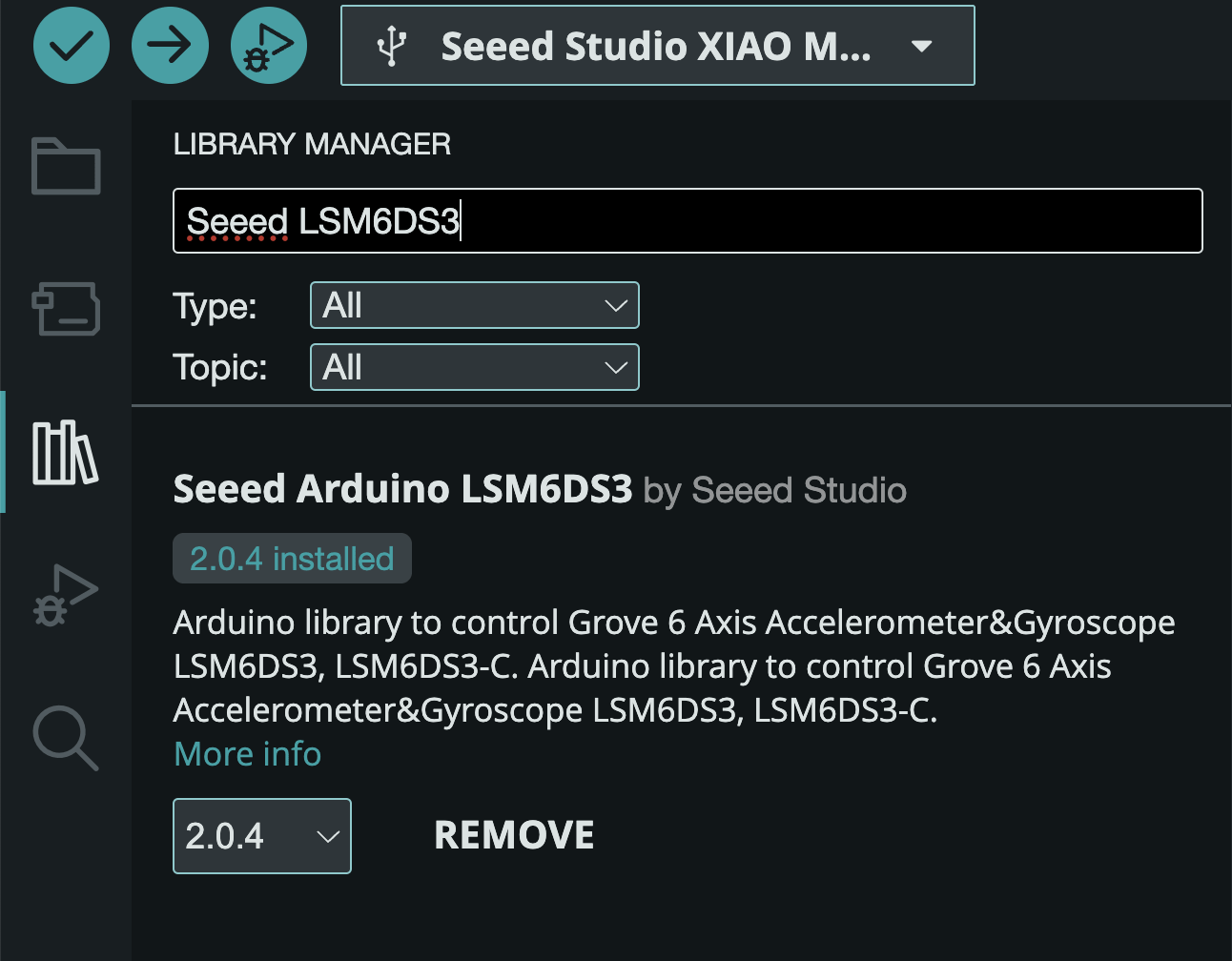
通过库管理搜索并安装 Seeed LSM6DS3 库
- 通过 GitHub 下载安装:
- 访问 https://github.com/Seeed-Studio/Seeed_Arduino_LSM6DS3
- 点击 "Code" 按钮,选择 "Download ZIP",如下图所示
- 下载完成后,在 Arduino IDE 中
- 点击菜单栏:项目 -> 加载库 -> 添加 .ZIP 库
- 选择下载的 ZIP 文件
- 等待安装完成
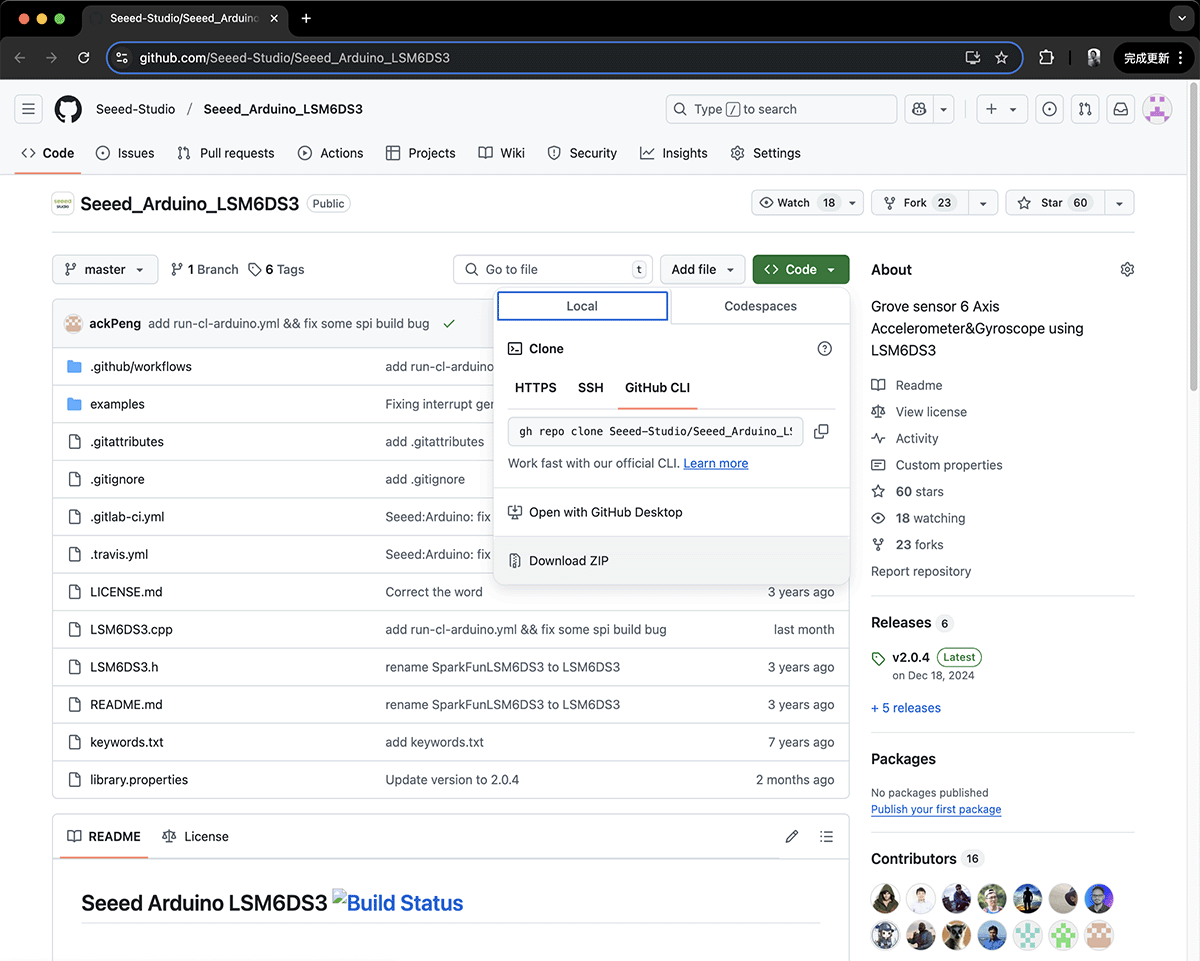
通过 Github 下载 ZIP 库
安装完成后,你可以:
- 通过菜单栏:文件 -> 示例 -> Seeed_Arduino_LSM6DS3 查看示例代码
- 在代码中使用
#include "LSM6DS3.h"来包含库文件
注意:安装库后需要重启 Arduino IDE 才能确保库被正确加载。
上传 IMU 测试程序并观察结果
所需库安装成功后,在 Arduino IDE 中上传 IMU 测试代码,打开串口监视器,将波特率设置为:115200,可以看到下图所示的提示信息。
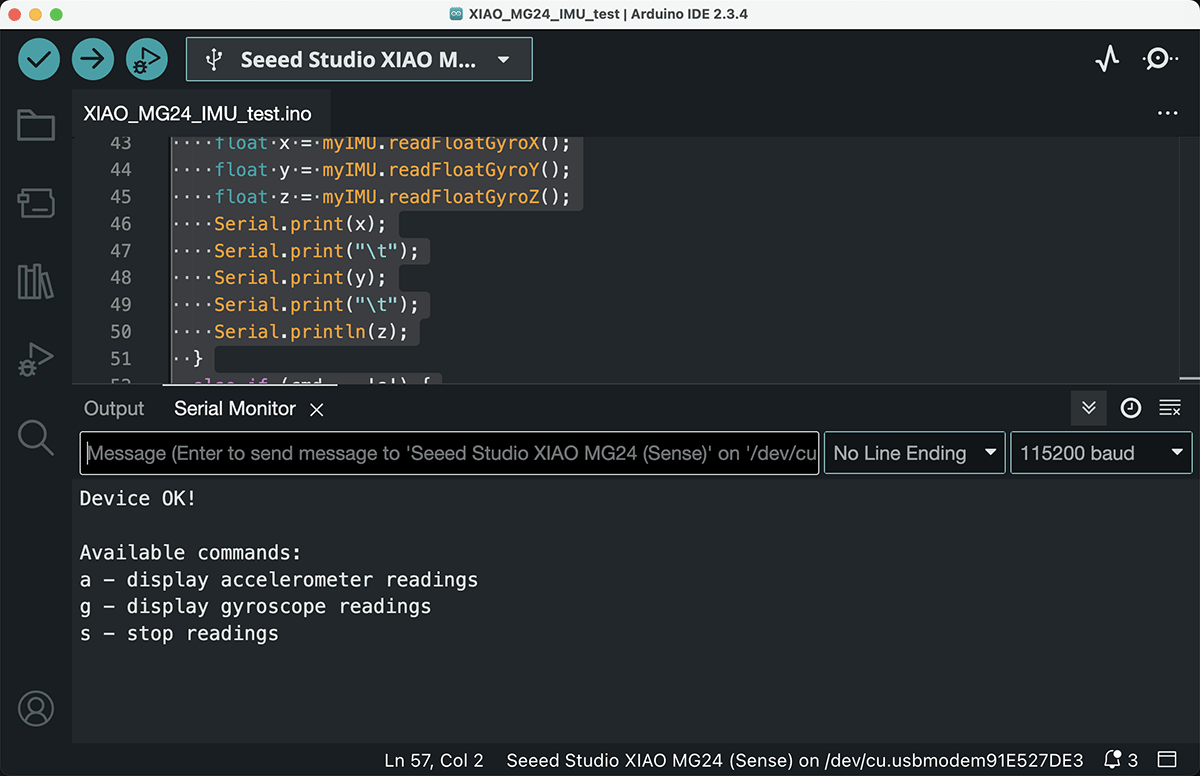
运行 IMU 测试程序后显示提示命令,等待输入
根据提示输入所需命令:
- 输入 'a' 显示加速度计数据
- 输入 'g' 显示陀螺仪数据
- 输入 's' 停止数据显示
输入“a”可以看到 3 个轴的加速度数据在不断的输出。打开串口绘图仪,如下图所示,可以看到 3 轴加速度计数值的曲线图。
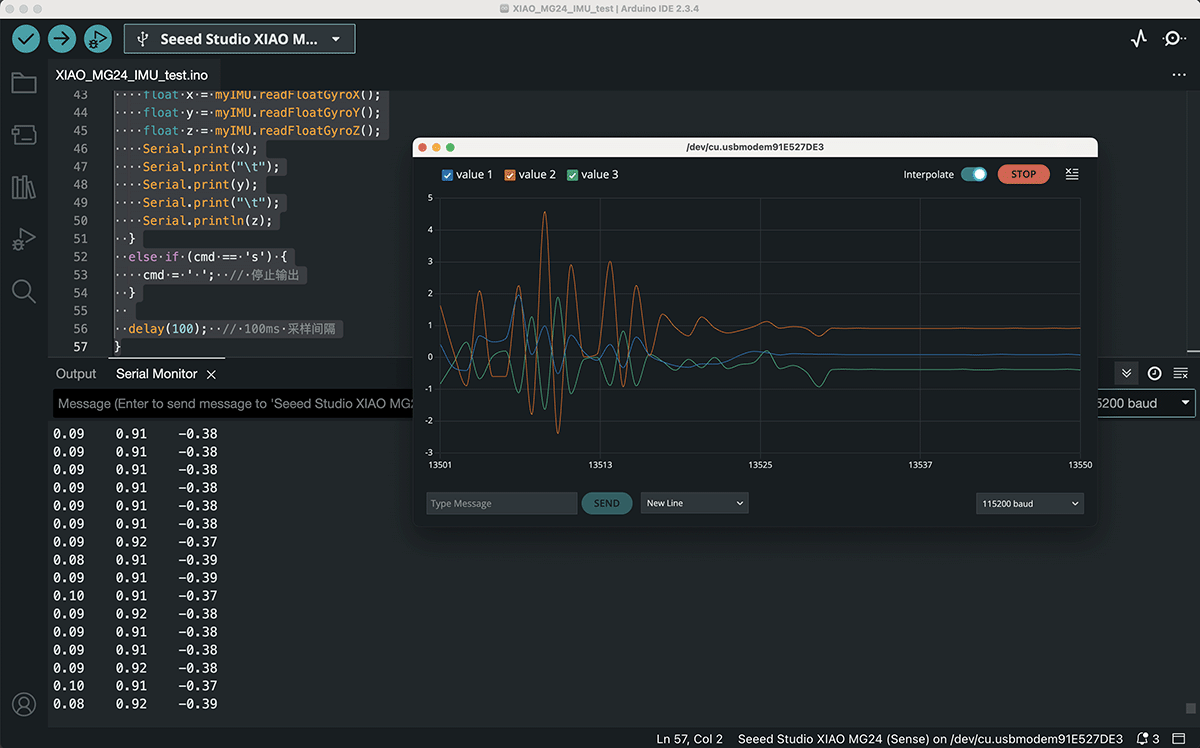
在 Arduino 中打开串口绘图仪
现在我们晃动 XIAO MG24,可以看到串口绘图仪会呈现 3 轴加速度的变化曲线。
Arduino IDE 的串口绘图仪,展示晃动的 XIAO MG24 的 IMU 的 3 轴加速度的变化曲线
更详细的教程文档可以查看:https://wiki.seeedstudio.com/xiao_mg24_sense_built_in_sensor/
使用 Wokwi 模拟嵌入式程序运行
一、模拟环境介绍
嵌入式系统的开发周期中,模拟是一个重要环节,它可以帮助我们在没有实际硬件的情况下验证程序逻辑,节省时间和成本。我将使用 Wokwi 针对XIAO MG24 Sense开发板进行加速度计模拟,由于 Wokwi 目前不直接支持该型号,我使用 XIAO ESP32C3 加外接加速度计作为替代方案进行模拟。
Wokwi 在线模拟平台
二、模拟环境设置
创建Wokwi项目
- 访问Wokwi在线模拟平台
- 点击"ESP32"
- 在“Starter Templates”中可以看到"XIAO ESP32-C3"
- 如下图所示,点击"XIAO ESP32-C3"从示例项目开始
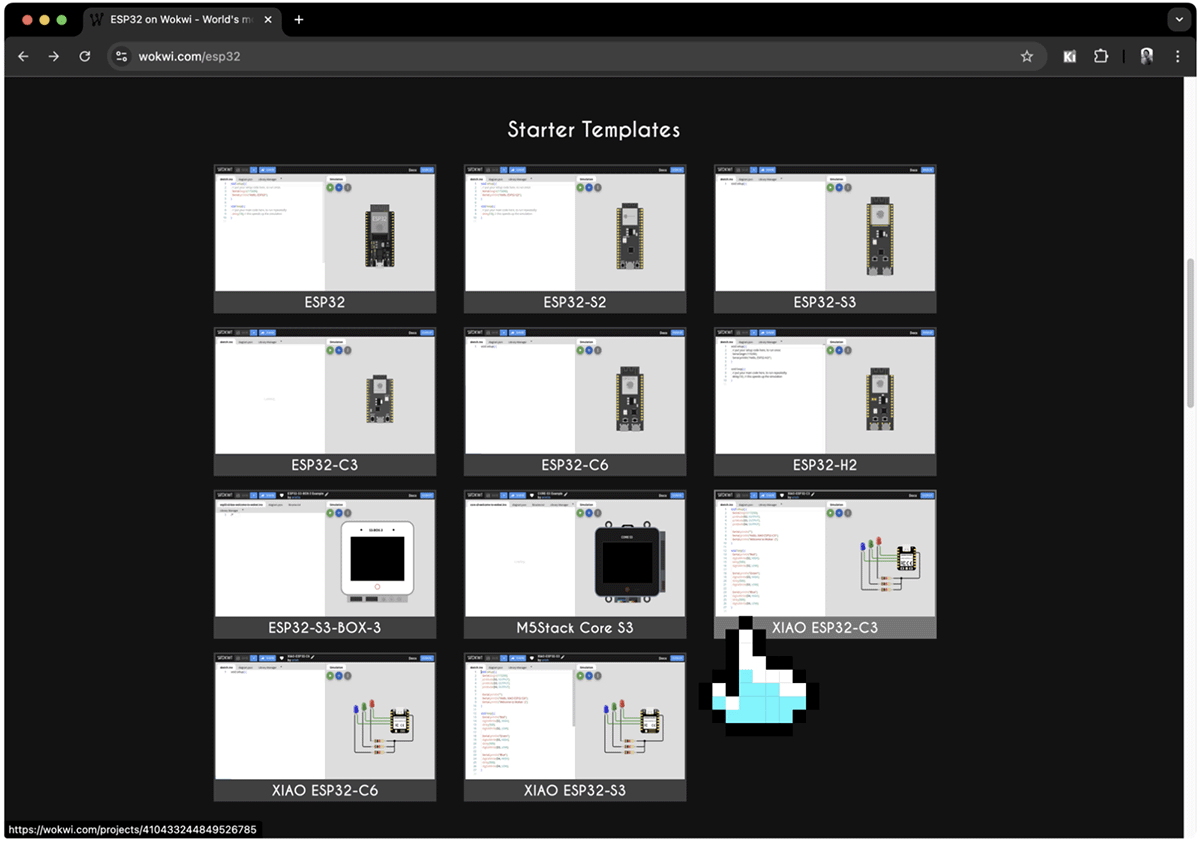
在“Starter Templates”中可以看到"XIAO ESP32-C3"
进入 XIAO ESP32-C3 的示例项目后,可以直接点击仿真标签下的启动仿真按钮,可以看到 3 个 LED 轮流点亮的效果,如下图所示。
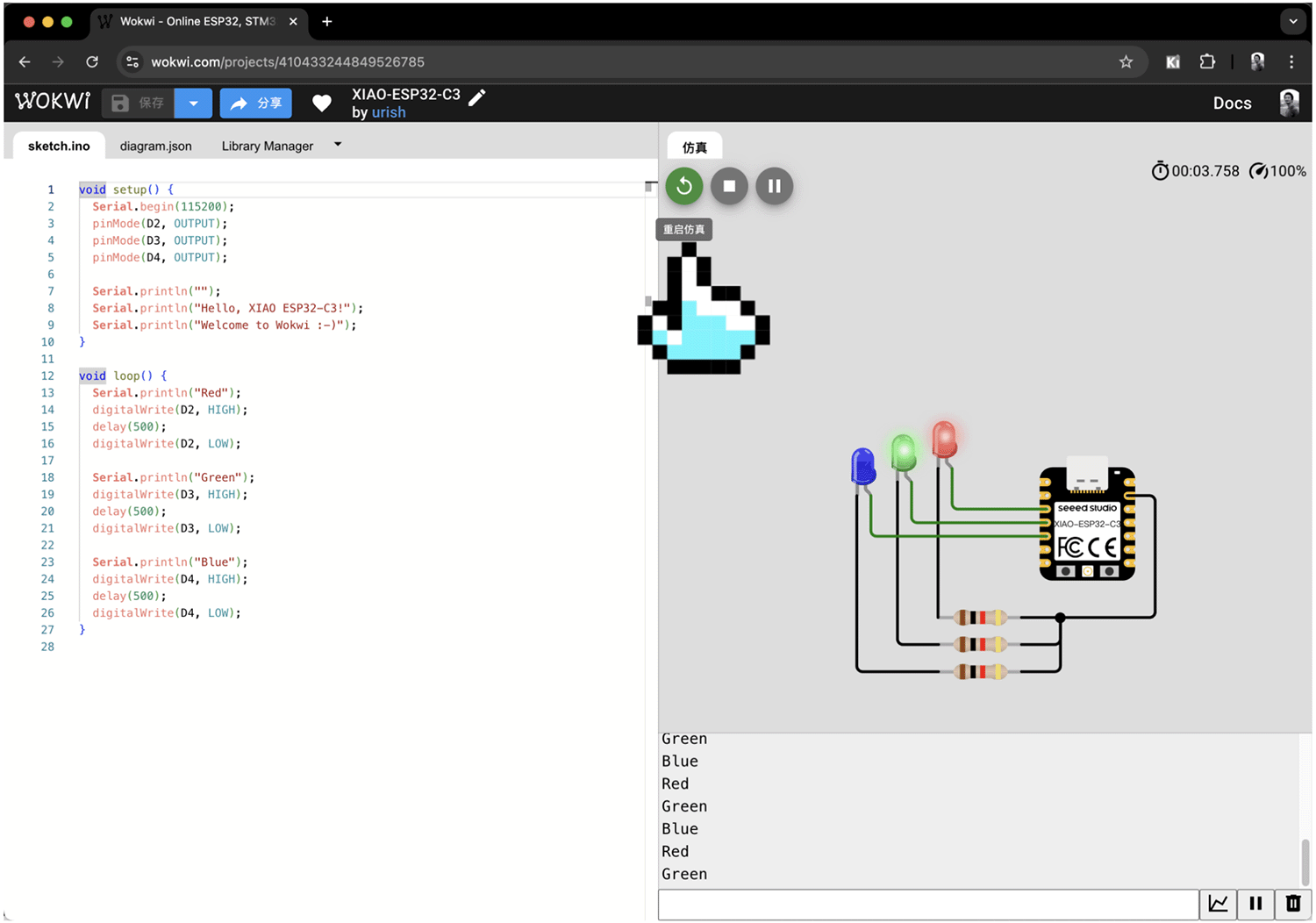
运行轮流点亮 3 个 LED 的示例程序
由于我们需要模拟加速度计,可以点击选中这些不需要的元件,按删除键删除,如下图所示。
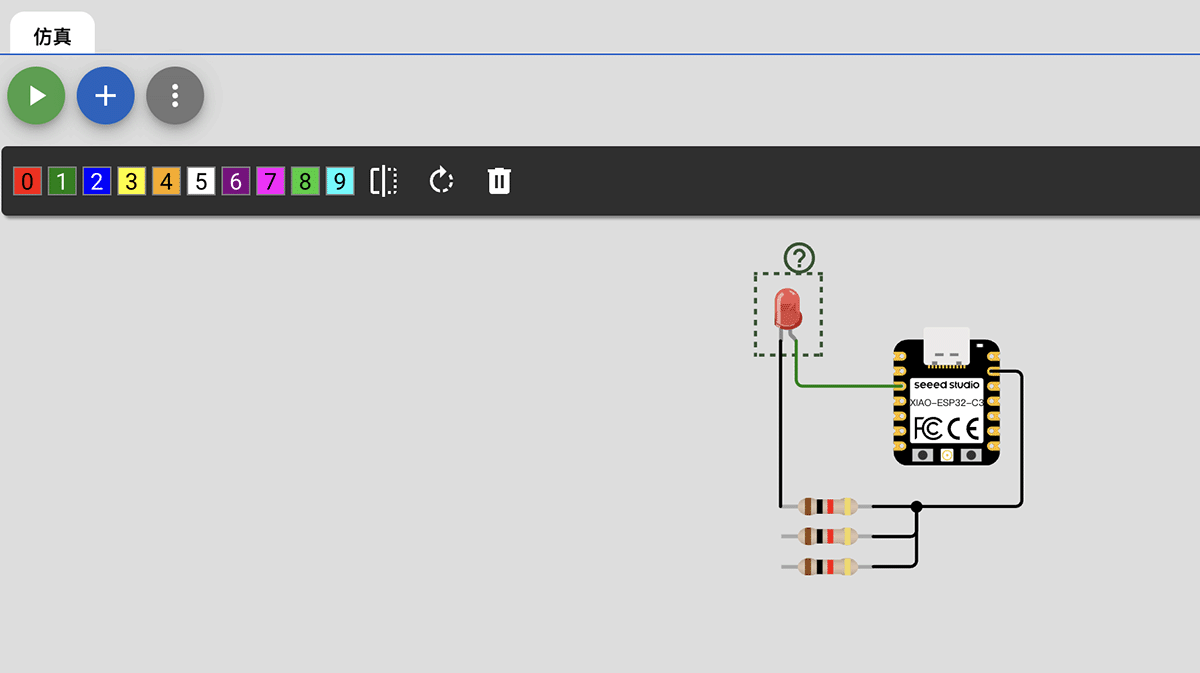
逐个删除不需要的元件
添加MPU6050加速度计
由于我们的主要目的是模拟IMU传感器的功能,我们需要添加MPU6050加速度计:
- 在项目界面右侧,点击仿真标签的"+"按钮。
- 在传感器栏中找到"MPU6050"。
- 添加 MPU6050 元件到模拟项目,如下图所示。
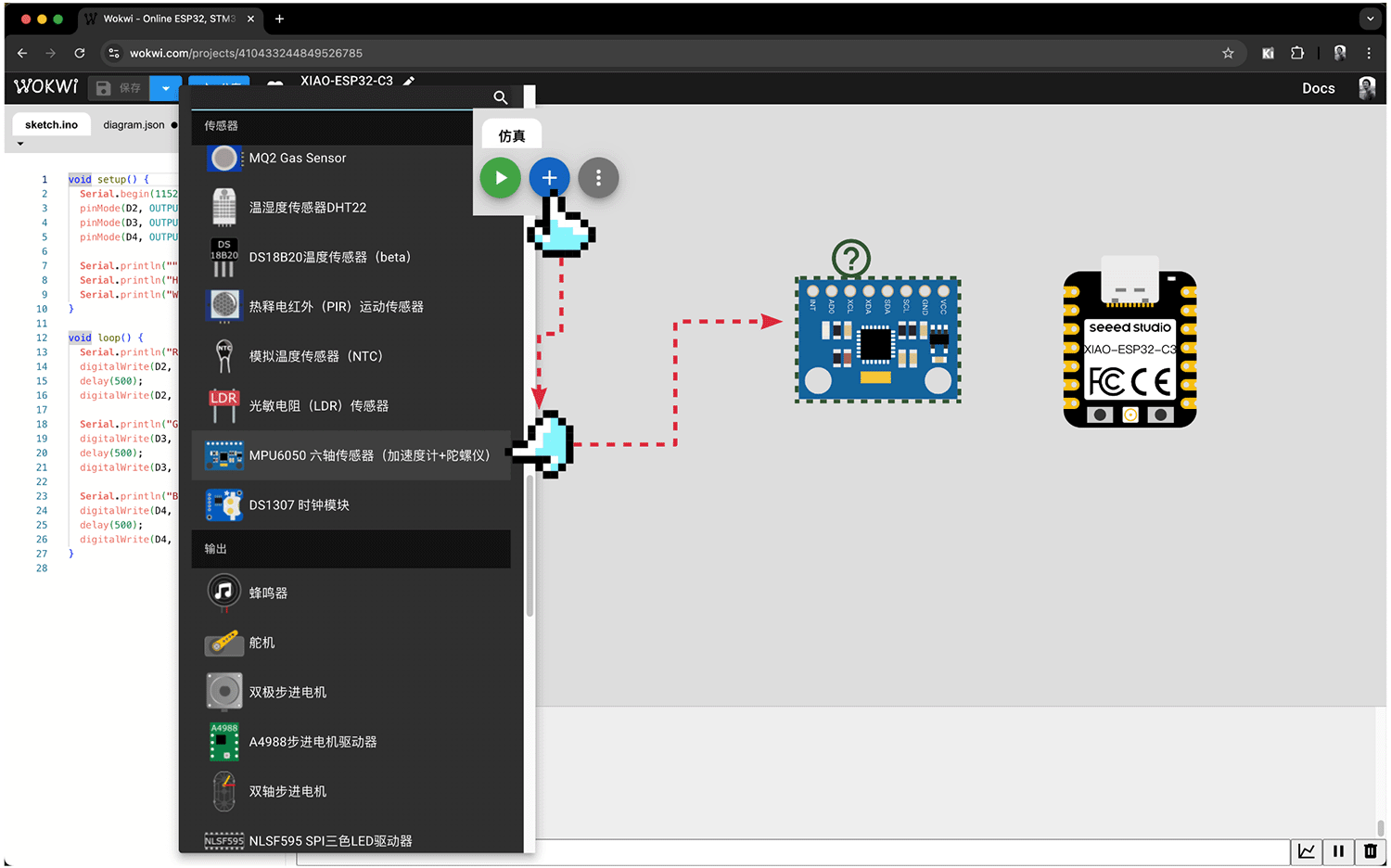
添加MPU6050元件到模拟项目
连接硬件
根据XIAO ESP32C3和MPU6050的引脚定义,我们需要正确连接这两个组件:
| MPU6050引脚 | XIAO ESP32C3引脚 | 连接说明 |
|---|---|---|
| VCC | 3V3 | 电源 |
| GND | GND | 接地 |
| SCL | D5 (GPIO7) | I2C时钟线 |
| SDA | D4 (GPIO6) | I2C数据线 |
| AD0 | GND | 设置I2C地址为0x68 |
| INT | 不连接 | 中断线(本例不使用) |
使用虚拟连线工具连接组件,如下图所示。
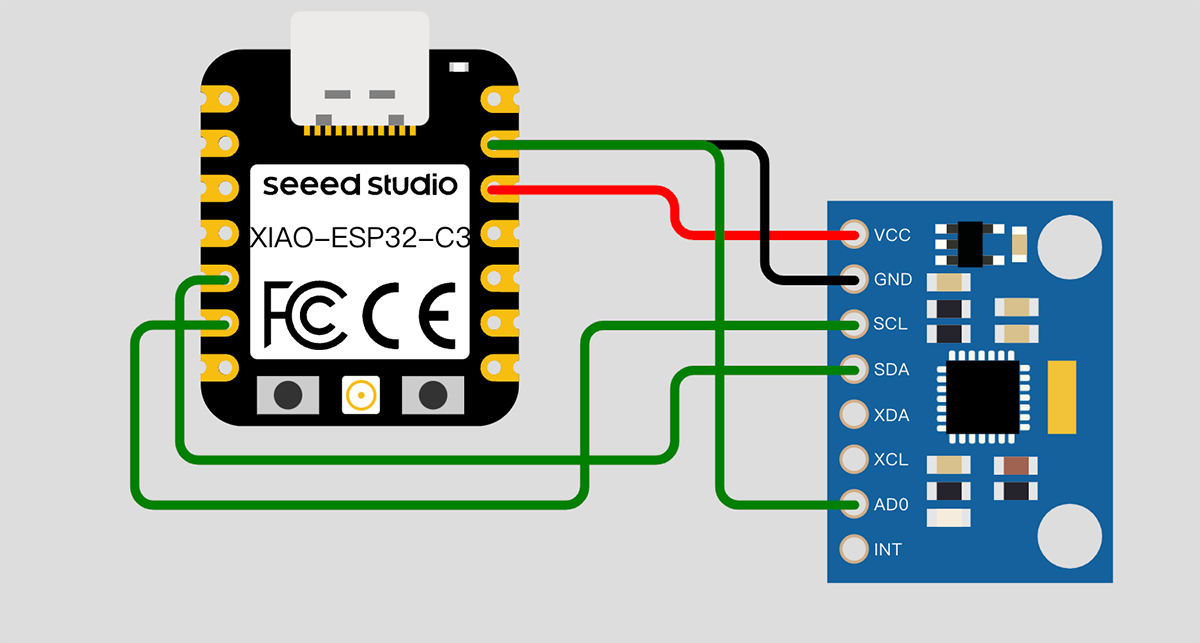
MPU6050与XIAO ESP32C3的连接示意图
三、调整代码以适应模拟环境
由于我们使用的是不同的硬件平台和传感器,需要调整代码以适应模拟环境。主要区别在于:
- LSM6DS3TR-C 传感器替换为 MPU6050
- 使用适合 MPU6050 的库和 API
IMU 测试程序的模拟版本
我修改了 IMU 测试程序如下所示:
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu; // 创建MPU6050对象
char cmd = ' '; // 使用单个字符来存储命令
void setup() {
Wire.begin();
Serial.begin(115200);
delay(1000);
Serial.println("初始化MPU6050...");
// 初始化MPU6050,设置陀螺仪和加速度计量程
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G)) {
Serial.println("无法找到有效的MPU6050传感器,请检查连接!");
delay(500);
}
Serial.println("设备就绪!");
Serial.println("\n可用命令:");
Serial.println("a - 显示加速度计读数");
Serial.println("g - 显示陀螺仪读数");
Serial.println("s - 停止读数");
}
void loop() {
if (Serial.available()) {
cmd = Serial.read();
}
if (cmd == 'a') {
// 读取加速度计数据
Vector normAccel = mpu.readNormalizeAccel();
Serial.print(normAccel.XAxis);
Serial.print("\t"); // 使用制表符分隔
Serial.print(normAccel.YAxis);
Serial.print("\t");
Serial.println(normAccel.ZAxis);
}
else if (cmd == 'g') {
// 读取陀螺仪数据
Vector normGyro = mpu.readNormalizeGyro();
Serial.print(normGyro.XAxis);
Serial.print("\t");
Serial.print(normGyro.YAxis);
Serial.print("\t");
Serial.println(normGyro.ZAxis);
}
else if (cmd == 's') {
cmd = ' '; // 停止输出
}
delay(100); // 100ms 采样间隔
}四、运行模拟
将程序复制到左侧的程序区,点击顶部的"Start Simulation"按钮开始模拟。结果显示构建失败,如下图所示。
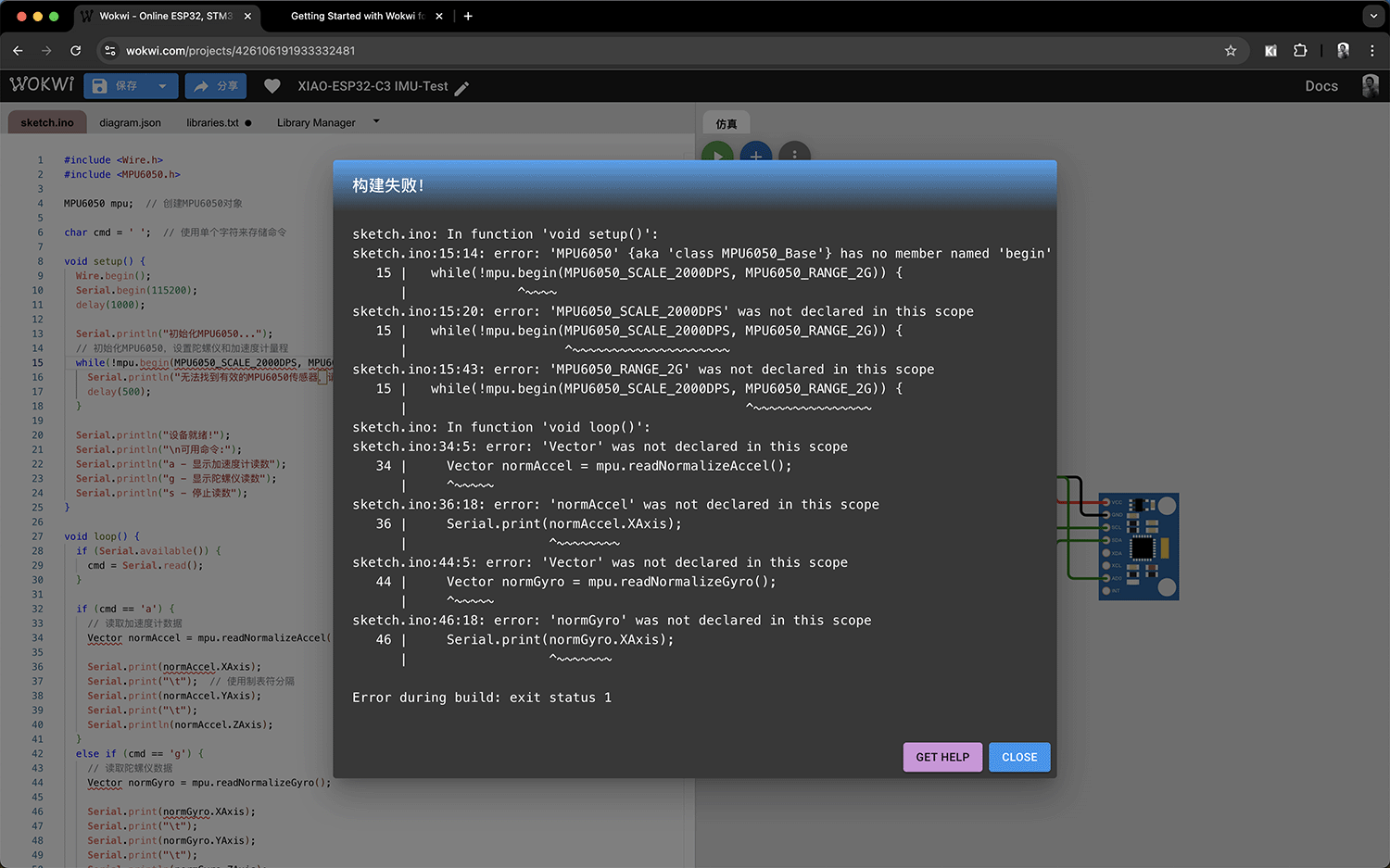
初次运行模拟出现错误提示
使用 Claude 3.7 解决问题
我尝试向 Claude 3.7 反馈了目前的状况和错误,并提供了当前的程序、diagram.json,错误提示文本,MPU6050 的文档链接,Claude 给出了修改后的程序。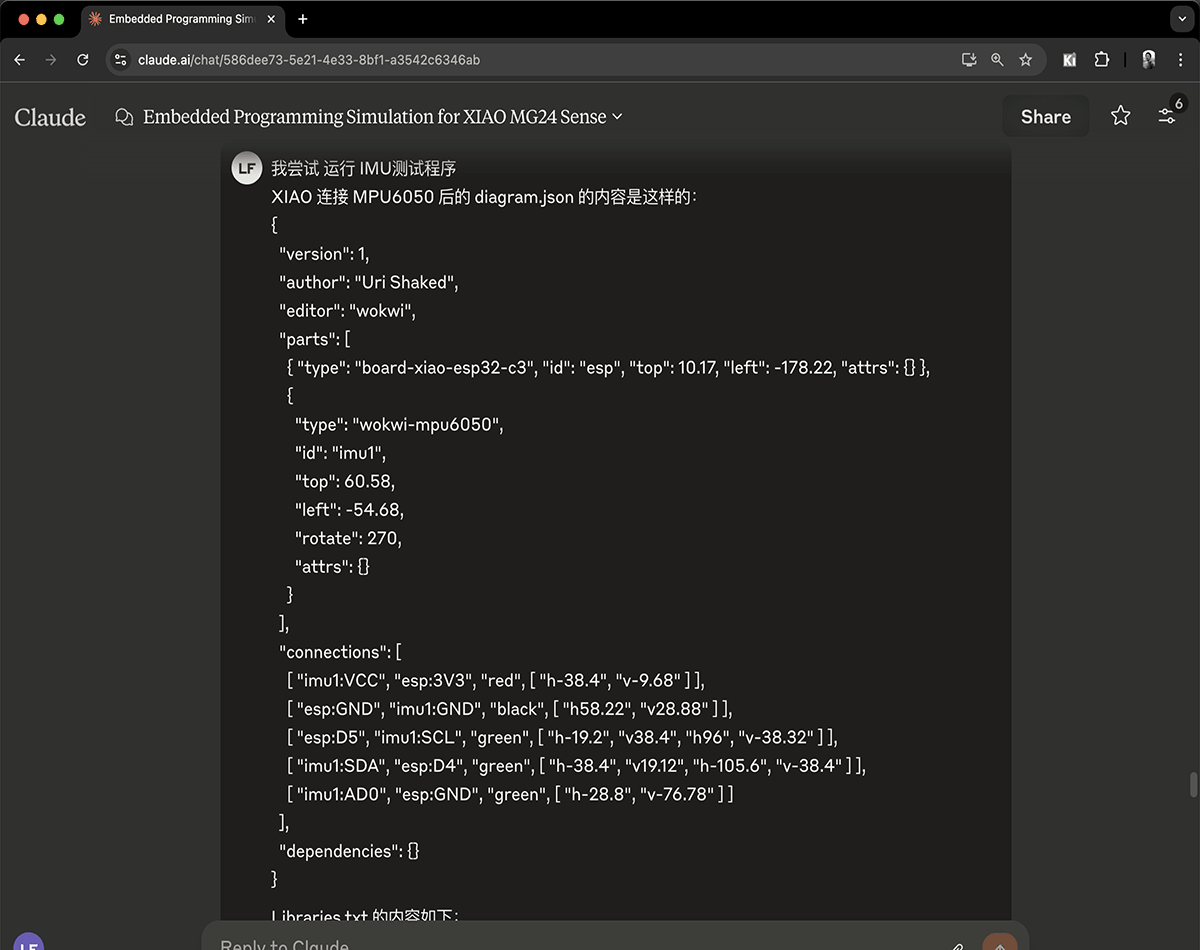
向 Claude 3.7 提交问题的背景资料
Claude 给出的修改后的程序如下。
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
char cmd = ' ';
void setup() {
Wire.begin();
Serial.begin(115200);
delay(1000);
Serial.println("初始化MPU6050...");
// 初始化MPU6050
mpu.initialize();
if (mpu.testConnection()) {
Serial.println("MPU6050连接成功!");
} else {
Serial.println("MPU6050连接失败,请检查接线!");
while (1);
}
Serial.println("\n可用命令:");
Serial.println("a - 显示加速度计读数");
Serial.println("g - 显示陀螺仪读数");
Serial.println("s - 停止读数");
}
void loop() {
if (Serial.available()) {
cmd = Serial.read();
}
if (cmd == 'a') {
// 读取加速度计数据
int16_t ax, ay, az;
mpu.getAcceleration(&ax, &ay, &az);
// 转换为g值 (1g = 16384 LSB)
float x = ax / 16384.0;
float y = ay / 16384.0;
float z = az / 16384.0;
Serial.print(x);
Serial.print("\t");
Serial.print(y);
Serial.print("\t");
Serial.println(z);
}
else if (cmd == 'g') {
// 读取陀螺仪数据
int16_t gx, gy, gz;
mpu.getRotation(&gx, &gy, &gz);
// 转换为度/秒 (1 度/秒 = 131 LSB)
float x = gx / 131.0;
float y = gy / 131.0;
float z = gz / 131.0;
Serial.print(x);
Serial.print("\t");
Serial.print(y);
Serial.print("\t");
Serial.println(z);
}
else if (cmd == 's') {
cmd = ' '; // 停止输出
}
delay(100); // 100ms 采样间隔
}将修改后的程序复制替换左侧的程序,再次尝试运行仿真,这次程序能够正常运行,在模拟的串口监视器上给出命令提示。可以通过串口监视器输入'a'来查看加速度数据,输入'g'来查看陀螺仪数据,输入 S-停止读数。
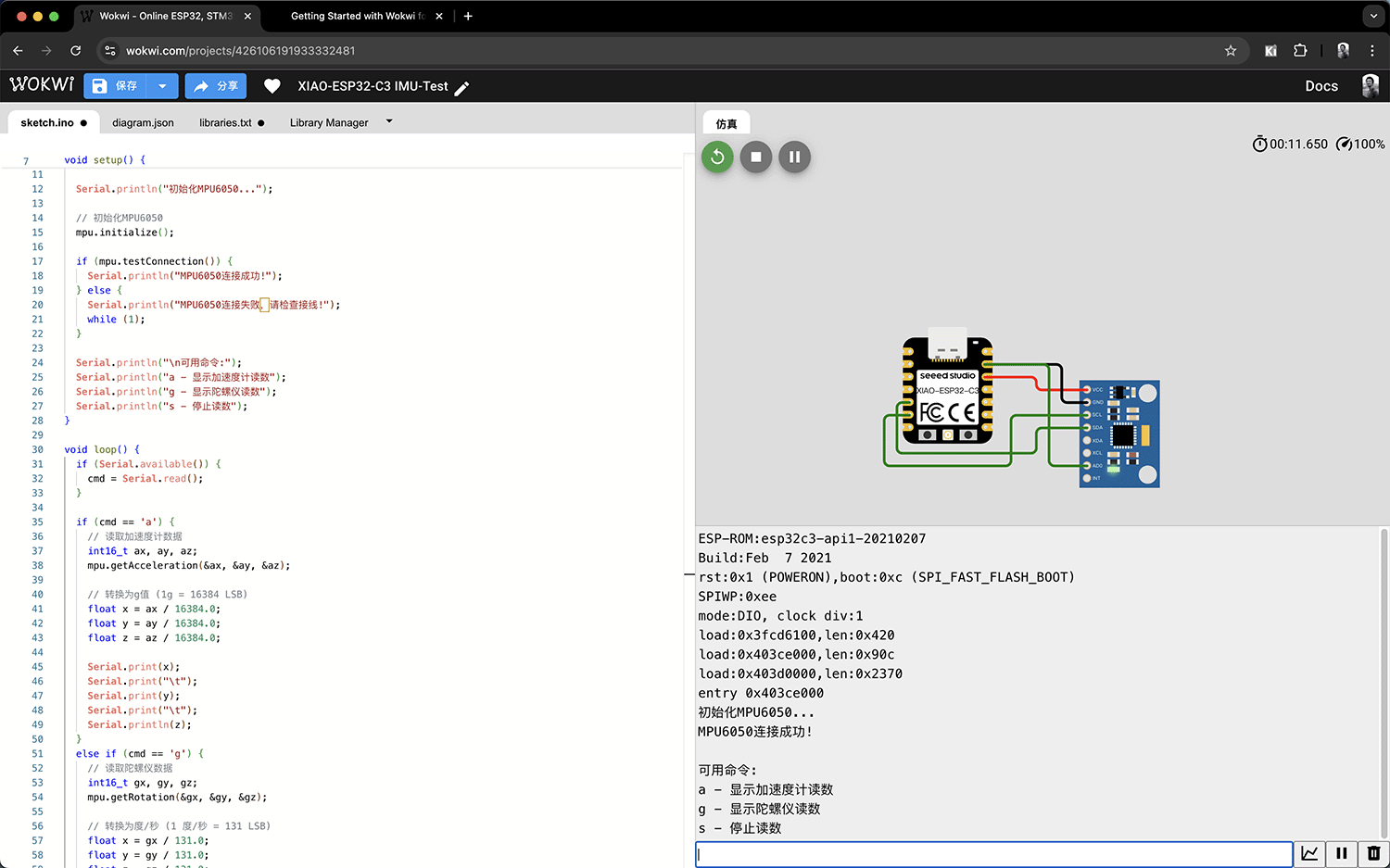
顺利运行 AI 修改后的程序
模拟传感器输入
Wokwi 提供了可视化的方式来模拟 MPU6050 的运动:
- 点击模拟器中的 MPU6050 元件。
- 使用出现的控制面板调整加速度和角度。
- 观察串口监视器中数值的变化。
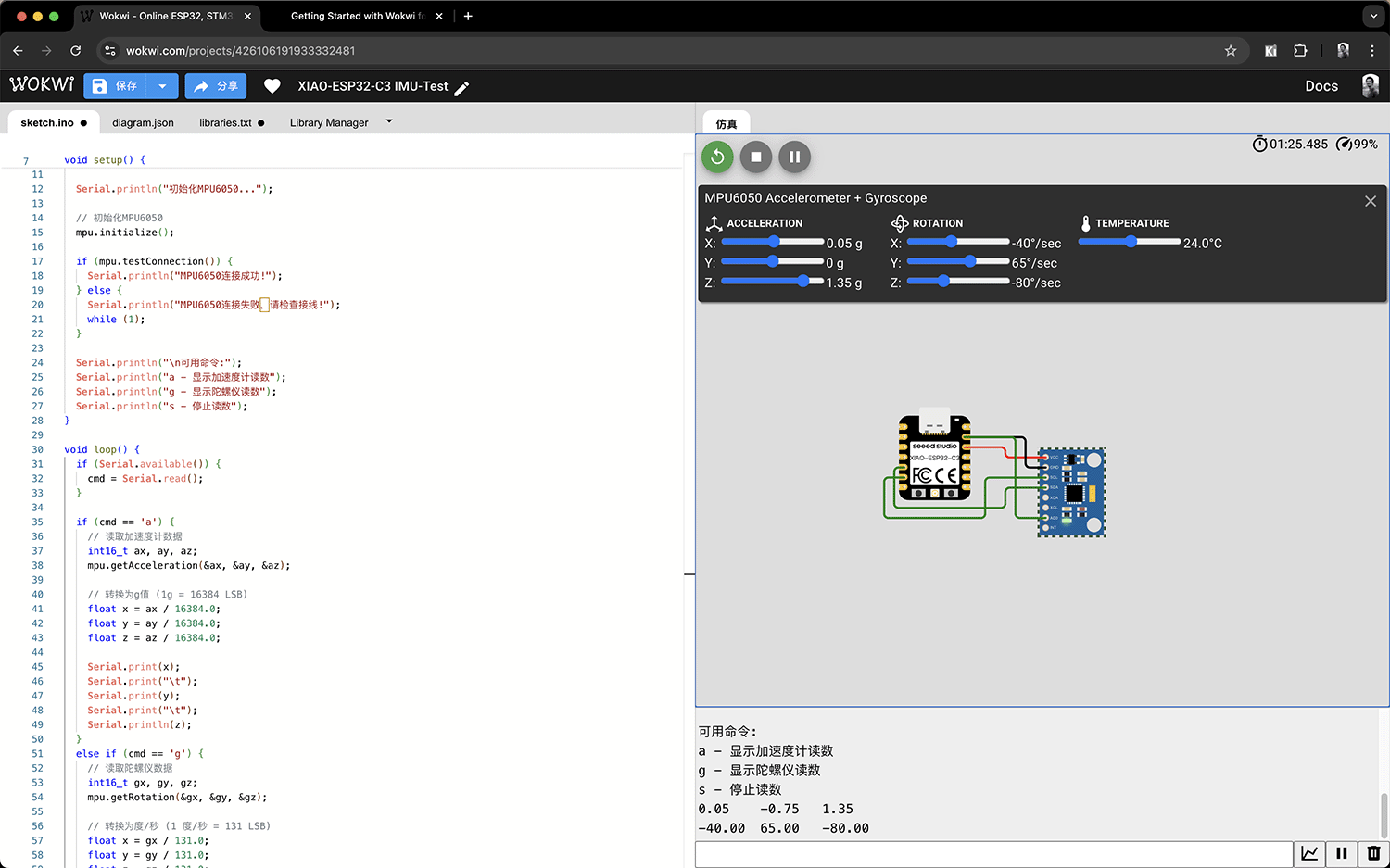
MPU6050 传感器控制面板
五、模拟结果分析
实际硬件与模拟环境的比较
| 方面 | 实际硬件 (XIAO MG24 Sense) | 模拟环境 (XIAO ESP32C3 + MPU6050) |
|---|---|---|
| 处理器 | EFR32MG24 (ARM Cortex-M33) | ESP32-C3 (RISC-V) |
| IMU传感器 | LSM6DS3TR-C | MPU6050 |
| 传感器接口 | I2C | I2C |
| API差异 | LSM6DS3::readFloatAccelX() | MPU6050::readNormalizeAccel() |
| LED控制 | 直接支持板载LED | 需要使用外部LED或GPIO模拟 |
功能等效性分析
尽管硬件平台存在差异,但模拟环境能够实现以下核心功能:
- 基本的I2C通信
- 加速度和陀螺仪数据的读取
- 实时数据显示和分析
这些功能足以验证我们的程序逻辑是否正确,在实际硬件上可能只需要小幅调整API调用方式。
六、模拟的优势与局限性
优势
- 无需实际硬件即可测试代码逻辑
- 提供可视化的传感器数据输入
- 便于调试和优化
- 快速验证算法正确性
局限性
- 硬件平台差异导致部分功能无法完全模拟
- 无法测试特定硬件的性能特性
- 某些中断和时序敏感操作可能与实际硬件有差异
- 对于低功耗特性无法准确模拟