智幻走马灯系统设计
方案调整说明
在项目进展过程中,我最近完成了走马灯的旋转灯罩机械结构设计,这促使我对整个系统进行了重新评估和调整。通过对机械结构的实际测试,我发现原有的硬件方案存在以下局限性:
- 旋转驱动不足:原计划使用的Mini Fan风扇无法提供足够的扭矩驱动灯罩旋转,需要更强力的驱动方案
- 灯光效果有限:板载的6个LED无法提供全方位的灯光效果,影响走马灯的视觉表现
- 交互体验受限:单一方向的手势识别无法适应用户从不同角度操作的需求
- 供电能力不足:固定电源线限制了装置的移动性和灵活性
基于这些发现,我对系统方案进行了全面调整,采用了N20双轴蜗轮蜗杆电机、双RGB灯带、多方向手势传感器和便携电池系统等方案,以提供更好的用户体验和系统性能。这些调整也要求我重新设计PCB,以支持新增的硬件组件和功能。
目前项目的核心功能模块调整为:
- 灯罩旋转系统:通过Grove Mini Fan 的 DC 驱动器驱动 N20 双轴蜗轮蜗杆电机,通过齿轮机构带动灯罩旋转。
- RGB灯光效果:采用两条14 LED珠可编程全彩RGB灯带,背靠背安装实现360度可视效果。
- 多方向手势交互:通过3个并联的APDS-9960手势传感器实现全方位的手势识别和控制。
- Wi-Fi 连接功能:通过MQTT协议实现多灯笼之间的状态同步和Web界面的远程控制。
- 便携电源系统:集成4000mAh可充电电池,支持移动使用。
本系统集成方案将详细说明如何基于调整后的圆形PCB设计,将这些模块整合为一个完整、可靠的系统。
智幻走马灯系统设计图
调整后的智幻走马灯系统架构总览
物理结构组成示意图如下图所示。
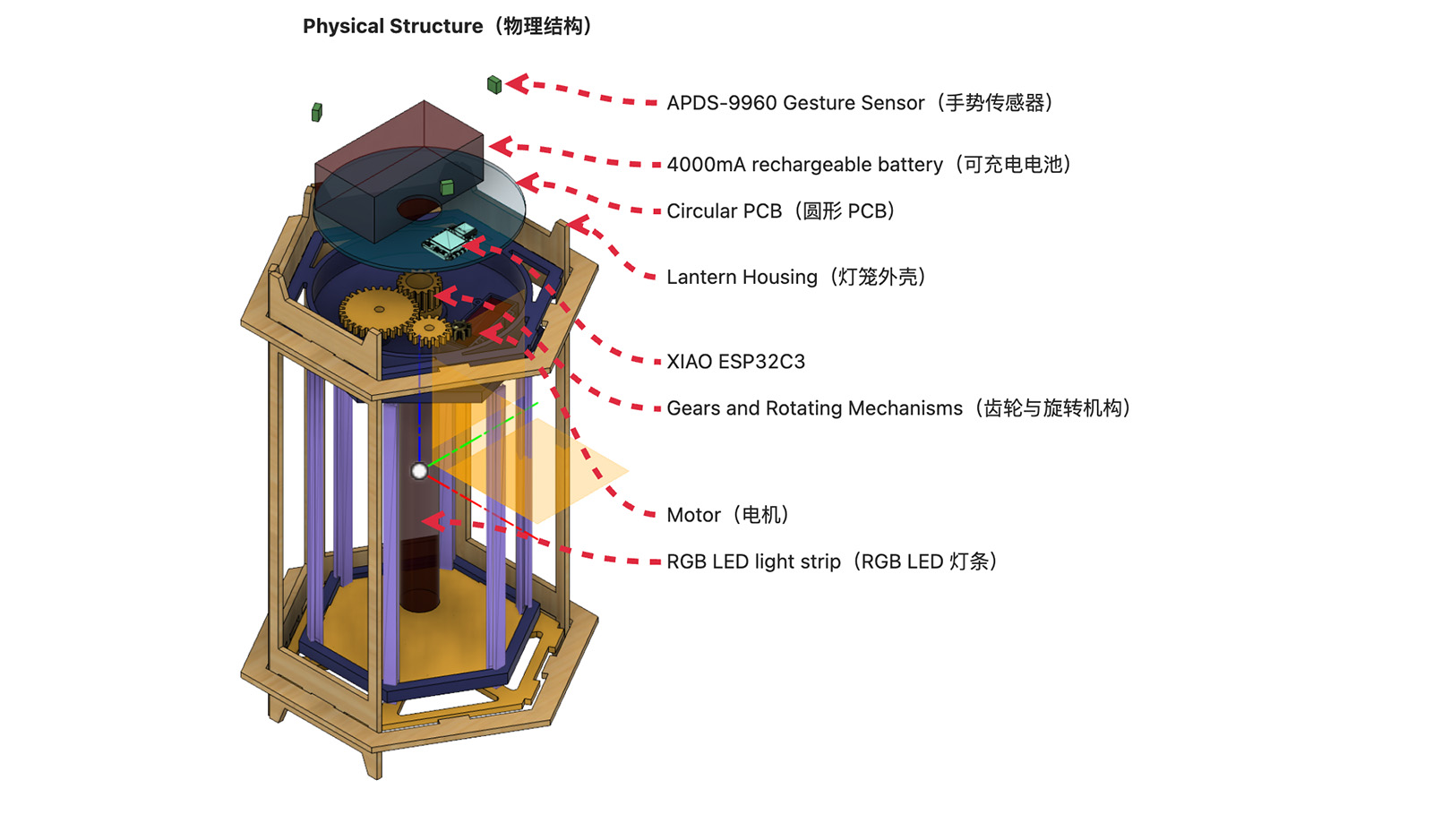
智幻灯笼的物理结构组成示意图
智幻走马灯的系统架构组成入下图所示。
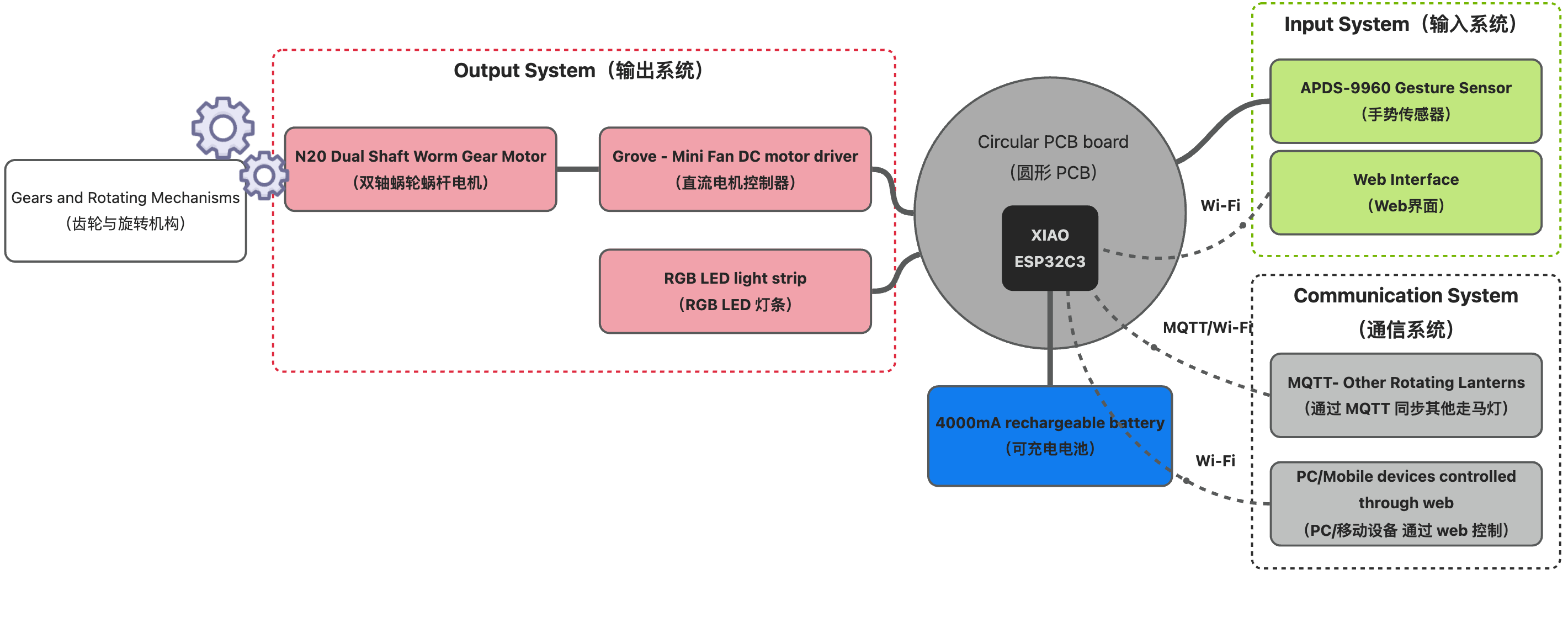
智幻走马灯的系统架构组成示意图
调整后的系统组件清单
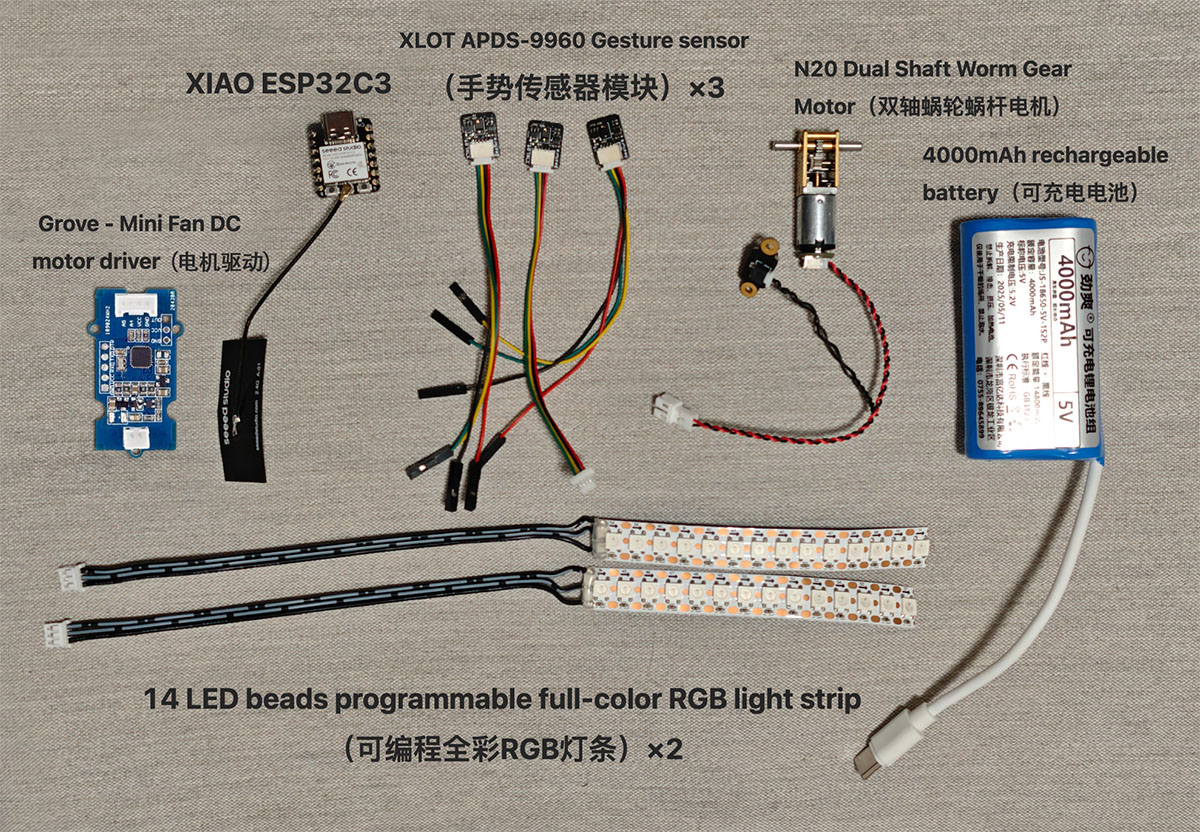
我的智幻走马灯准备采用以下电子硬件,价格为在中国购买价格折算为美元。
| 组件类别 | 组件名称 | 数量 | 状态 | 价格(USD) | 说明 |
|---|---|---|---|---|---|
| 控制核心 | XIAO ESP32C3 | 1 | 已有 | $5.00 | 主力MCU,负责系统控制 |
| 输入设备 | XLOT APDS-9960 手势传感器 | 3 | 已有 | $15.00 | 三方向手势识别,并联连接 |
| 输出设备 | 14 LED RGB灯带 | 2 | 已有 | $4.00 | 背靠背安装,提供360°视觉效果 |
| N20双轴蜗轮蜗杆电机 | 1 | 已有 | $6.00 | 从拓竹3D打印套件获取 | |
| Grove Mini Fan驱动器 | 1 | 已有 | $8.80 | 电机控制 | |
| 电源系统 | 4000mAh可充电电池 | 1 | 已有 | $4.00 | 带有TypeC接口,支持同时充放电 |
| 结构部件 | 灯笼外壳 | 1 | 已完成 | - | 第3周完成激光切割原型 |
| 旋转机构 | 1 | 已设计 已制造 | - | 3D 打印,适配N20双轴电机 | |
| PCB 与电池舱 | 1 | 待设计 待制造 | - | 在 PCB 板设计后进行 | |
| PCB | 圆形PCB板 | 1 | 待设计制作 | - | 根据新方案定制 |
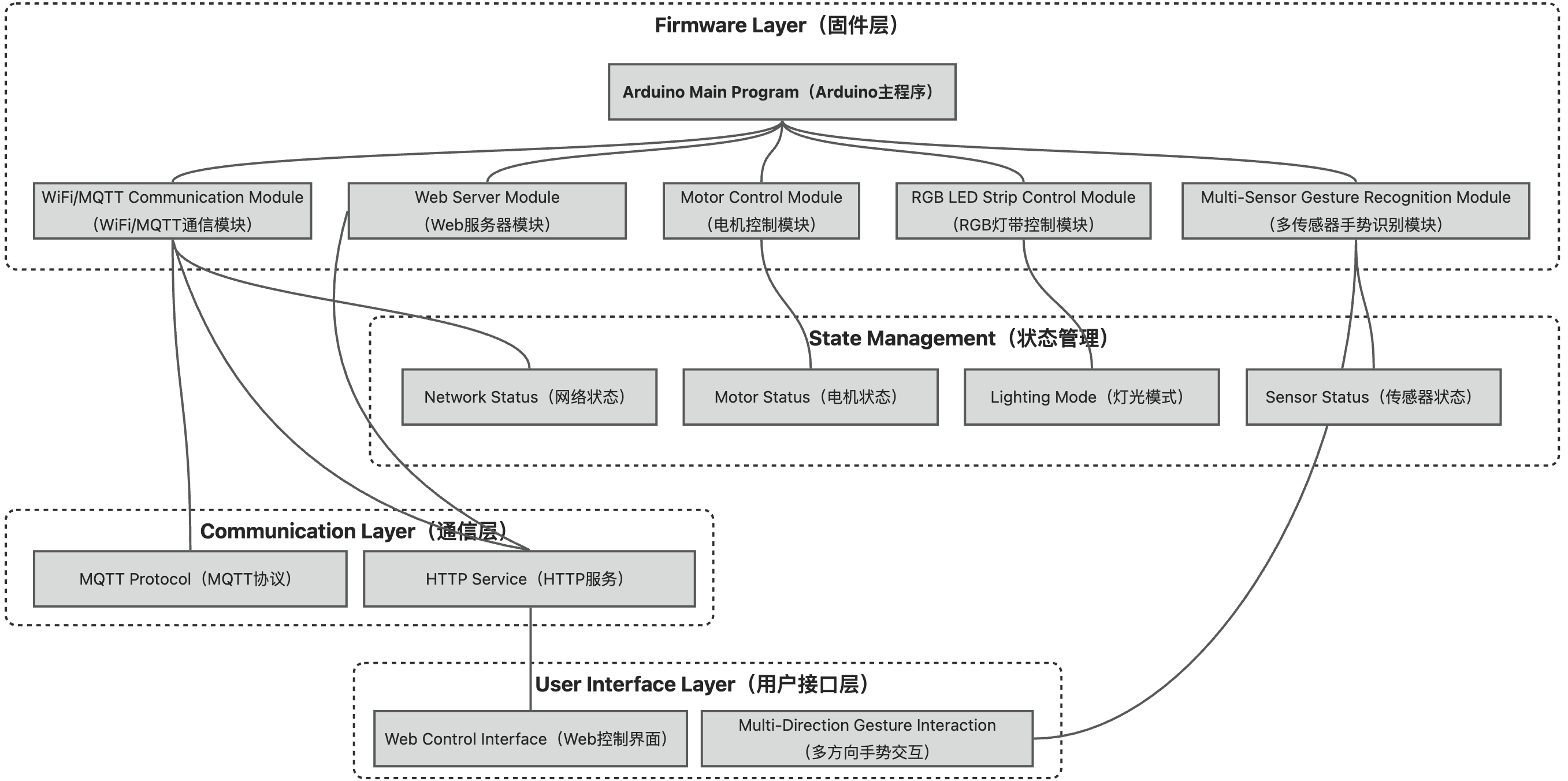
软件架构图
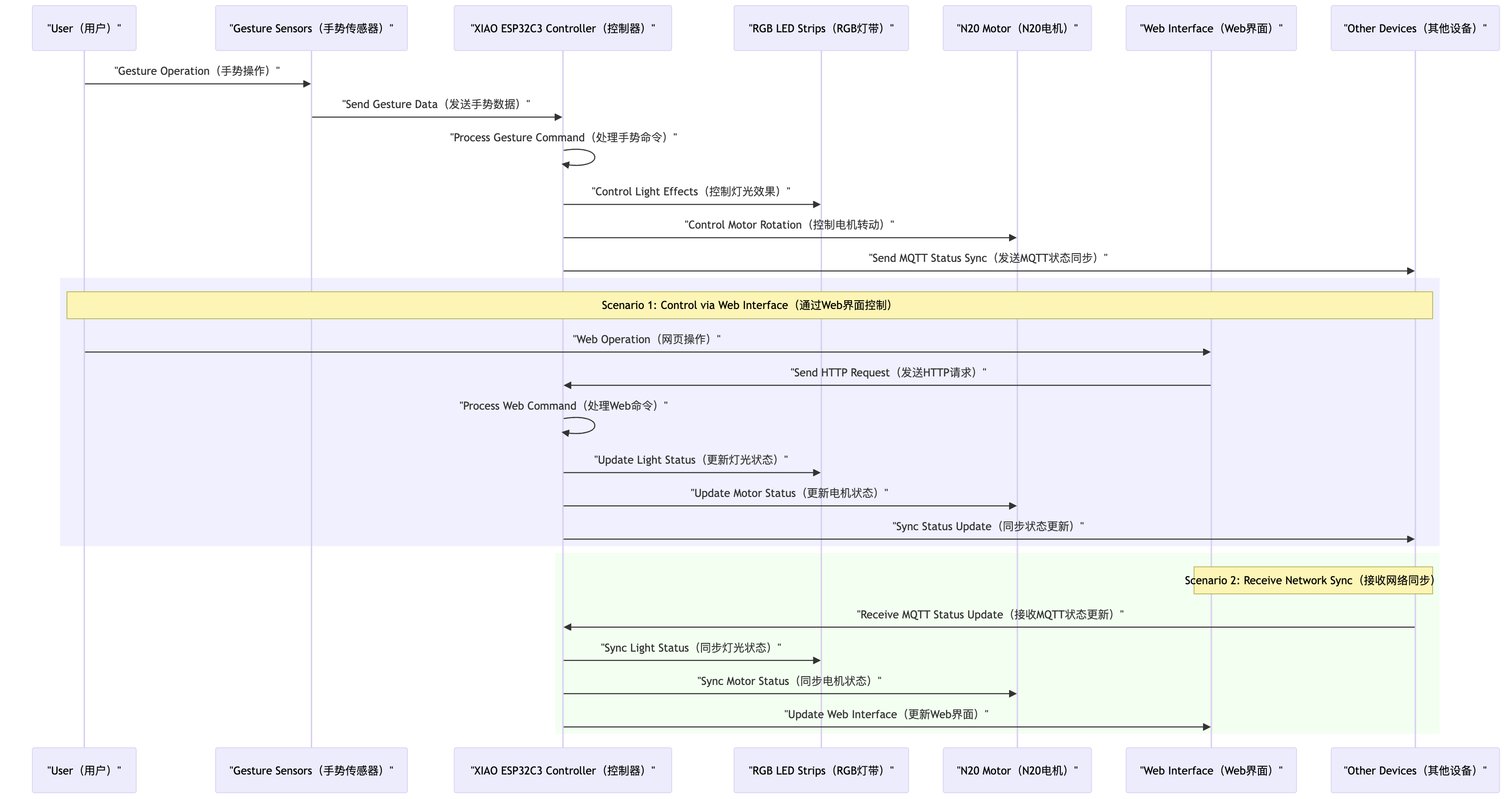
信号流程图
圆形 PCB 设计规格与要求
基本规格
- 形状:圆形PCB板
- 直径:约70mm(根据XIAO ESP32C3的尺寸和所有接口需求调整)
- 层数:双层 PCB(提供足够的走线空间)
- 材质:FR-4标准材质
- 表面处理:HASL铅免(符合环保要求)
关键设计要求
- 去除原有设计中的6个板载LED
- 添加以下功能接口:
- 5V电源输入/输出接口
- 3个并联 APDS-9960 手势传感器接口
- 2个可编程 RGB 灯带连接接口
- 电机驱动器连接接口
接口设计详情
电源系统接口
- 电池接口:JST 2 针连接器用于连接 4000mAh 可充电电池
- USB-C接口:用于外部供电或调试
- 5V输出接口:2组5V和GND引脚,用于供电给外部组件
手势传感器接口
- I2C接口×3:为3个并联的APDS-9960手势传感器设计的接口
- 每组接口包含:VCC(3.3V)、GND、SDA(数据线)、SCL(时钟线)
- 3个接口共享同一 I2C 总线,但每个接口可独立控制 VCC 电源
RGB灯带接口
- 灯带接口×2:支持2条可编程RGB灯带的并联连接
- 每组接口包含:5V、GND、数据控制引脚
- 数据控制引脚连接到XIAO ESP32C3的GPIO引脚
电机控制接口
- 电机驱动接口:连接 Grove Mini Fan 电机驱动器
- 包含:VCC(5V)、GND、控制信号引脚
- 控制信号引脚连接到 XIAO ESP32C3 的 GPIO 引脚
调整后的集成步骤
阶段一:PCB设计与制作(预计 5-7 天)
- 圆形PCB设计
- 根据新方案完成原理图设计
- 设计圆形PCB布局
- PCB布线并验证设计
- PCB制作与组装
- 生产PCB板
- 采购和准备所有元器件
- 焊接XIAO ESP32C3及接口连接器
- 接口测试
- 测试5V电源系统
- 测试I2C总线
- 测试GPIO输出接口
阶段二:组件集成(预计2-3天)
- 传感器系统集成
- 连接3个APDS-9960手势传感器
- 编写多传感器管理代码
- 测试传感器响应
- RGB灯带集成
- 安装2条RGB灯带
- 整合Adafruit_NeoPixel库
- 实现基础灯光效果
- 电机系统集成
- 安装N20双轴蜗轮蜗杆电机
- 连接Grove Mini Fan驱动器
- 测试电机控制功能
- 电源系统集成
- 连接4000mAh可充电电池
- 测试充放电功能
- 测量系统功耗
阶段三:软件开发(预计2-3天)
- 基础固件开发
- 整合多传感器处理代码
- 实现RGB灯带控制逻辑
- 实现电机控制功能
- 通信系统实现
- 设置WiFi连接功能
- 实现MQTT通信协议
- 开发Web控制界面
- 功能整合
- 实现手势控制逻辑
- 开发多灯同步功能
- 创建电池管理系统
阶段四:机械结构整合(预计 5-7 天)
- 传动机构实现
- 使用已设计好的传动装置
- 3D打印传动零件
- 测试传动效果
- 灯笼外壳适配
- 修改灯笼外壳设计
- 创建PCB和电池的安装结构
- 安装RGB灯带支架
- 最终组装
- 组装所有组件
- 固定连接线缆
- 进行整体平衡调整
调整后的测试计划
单元测试
| 测试对象 | 测试内容 | 预期结果 | 通过标准 |
|---|---|---|---|
| 多传感器系统 | 三方向手势识别 | 从三个不同方向识别手势 | 识别准确率>85% |
| RGB灯带控制 | 灯光效果控制 | 实现灯带跑马灯效果 | 视觉效果流畅 |
| 电机控制 | 速度控制和启停 | 电机平稳启动和调速 | 响应时间<150ms |
| 电池系统 | 续航能力 | 在正常使用下的续航时间 | >3小时 |
| 通信系统 | MQTT消息收发 | 设备间消息同步 | 延迟<200ms |
集成测试
| 测试场景 | 测试内容 | 预期结果 | 通过标准 |
|---|---|---|---|
| 全方位手势控制 | 从三个方向进行手势操作 | 系统对任意方向手势做出响应 | 响应率>90% |
| 灯光与电机协同 | 控制灯光和旋转同步变化 | 灯光和旋转效果协调一致 | 视觉效果良好 |
| 多灯笼同步 | 两台以上设备的联动 | 一台设备的变化同步到其他设备 | 同步延迟<300ms |
| 电源性能 | 满负载运行测试 | 电源系统稳定供电 | 电压波动<0.2V |
系统测试
| 测试方面 | 测试内容 | 预期结果 | 通过标准 |
|---|---|---|---|
| 可靠性 | 连续运行测试 | 系统长时间稳定运行 | 24小时无故障 |
| 网络适应性 | 不同网络环境测试 | 系统能适应网络变化 | 自动重连成功率>95% |
| 用户体验 | 实际用户操作测试 | 用户能直观操作系统 | 操作满意度高 |
| 功耗测试 | 不同模式下的功耗 | 记录并优化功耗表现 | 符合电池续航要求 |
潜在故障分析
| 故障点 | 风险描述 | 预防措施 | 故障处理方案 |
|---|---|---|---|
| PCB过载 | 多设备并联可能导致PCB过载 | 1. 增加PCB铜箔厚度 2. 宽设计电源走线 3. 监控系统温度 | 1. 软件限流保护 2. 温度过高自动降低功耗 |
| I2C冲突 | 多传感器并联可能导致地址冲突 | 1. 验证传感器地址 2. 软件检测地址冲突 3. 使用I2C多路复用器 | 1. 自动检测可用传感器 2. 降级为单传感器模式 |
| RGB灯带故障 | 灯带数据线干扰或损坏 | 1. 添加信号缓冲 2. 保持数据线短而直接 3. 屏蔽高速信号线 | 1. 灯带状态自检 2. 单灯带降级模式 |
维修与生命周期考虑
模块化设计与维修性
调整后的智幻走马灯采用高度模块化设计,确保易于维护和升级:
- 组件独立性
- PCB设计采用接插件连接方式,避免直接焊接外部组件
- 三个手势传感器可单独更换和调整
- RGB灯带采用标准接口,便于更换或升级
- 维修便利性
- 灯笼外壳设计可拆卸式底座,方便维修内部组件
- 电池采用可拆卸设计,支持快速更换
- 所有接口和连接器都有明确标识
- 故障诊断支持
- 内置自诊断程序,可通过Web界面检查各模块状态
- LED指示灯提供系统状态和错误代码