Week12 - Mechanical & Machine Design
Group Assignment:
The link of our group project: https://fabacademy.org/2026/labs/chaihuo/docs/week12/week12_group_assignment#output-structure
Individual Assignment:
Overview: The XIAO Vending Machine
For the machine design group assignment, our team designed and prototyped a vending machine specifically for Seeed Studio XIAO Series development boards. This project was a complete end-to-end integration:
-
User Interaction: RFID card tapping.
-
Control System: A Wio Terminal reads the RFID via I2C, verifies the credit token, and displays the status on its LCD.
-
Actuation: Two STS3215 serial-bus servos drive the mechanical gates to dispense a single XIAO board.
My Contribution
In our team’s workflow, I focused on the Idea Generation and the Overall Mechanical Structure. I worked closely with my teammates to brainstorm the dispensing logic and was responsible for translating our shared concepts into the physical architecture of the machine, ensuring the storage column and the servo-driven gates functioned reliably.

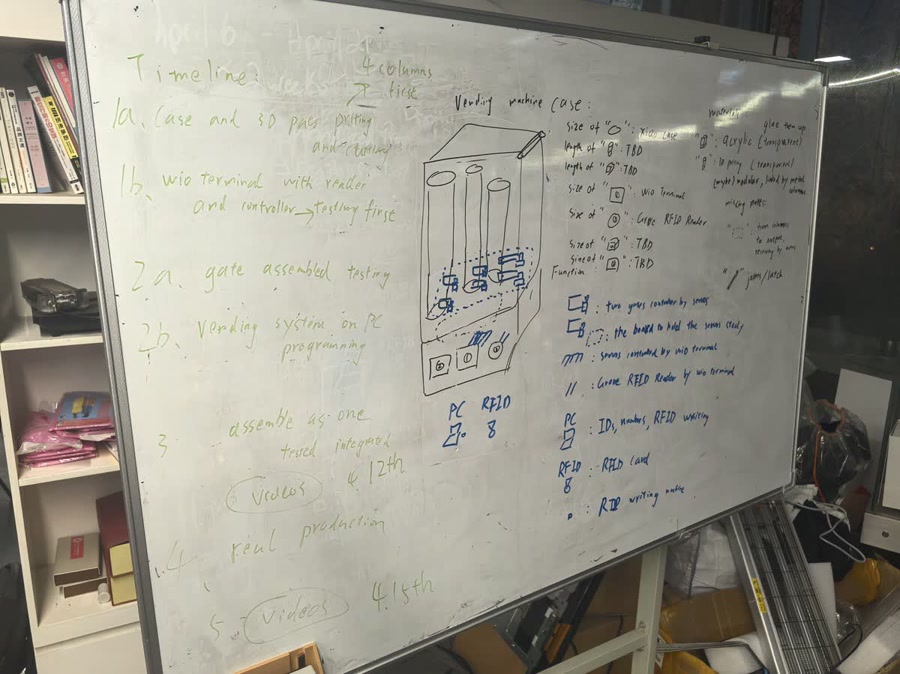
Idea Generation & Design Evolution
Our team spent a significant amount of time exploring different mechanical principles. My role was to research existing mechanisms and propose how they could be adapted for our specific needs. Before seeking for the real solution for XIAO vending machine, we discussed the definition/features first, to make sure our next brainstorming can be more efficient & won't be too extensive without the focus.
ing what kind of machine would be practical in a makerspace environment. A vending machine for XIAO boards quickly emerged as a strong concept, as it addresses a real need—providing on-demand access to development boards without requiring staff assistance.
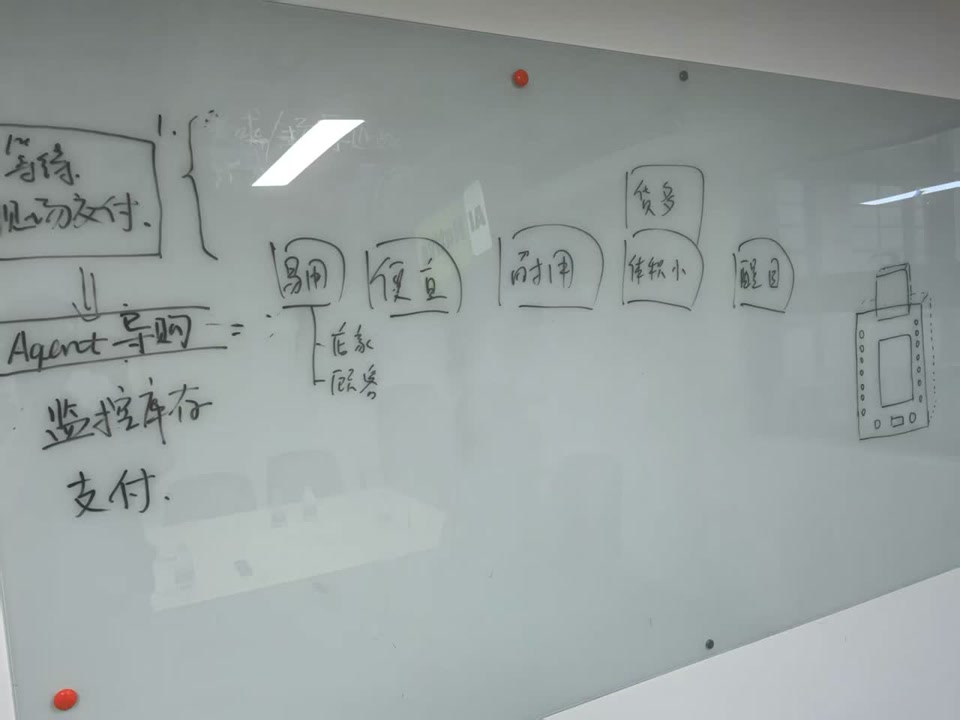
From the brainstorm, we converged on a set of core requirements for the machine:
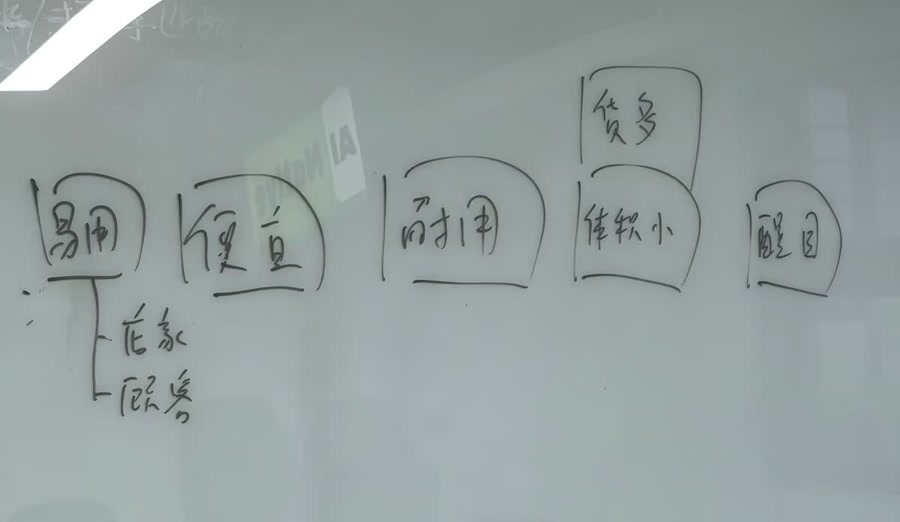
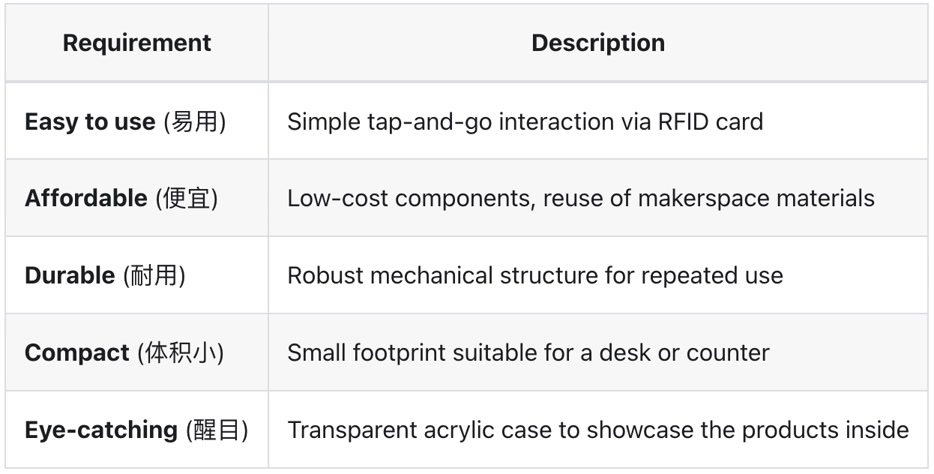
The machine is designed to enable both on-site and remote purchases (through an agent-based system), while also incorporating inventory tracking and an integrated digital payment process.
The Conceptual Journey
The final design didn't happen overnight. We explored several mechanical metaphors before settling on our current structure:
- Inspiration 1: The Gravity Candy Dispenser
Initially, I looked at the cylindrical M&M dispensers found in candy stores. These use gravity and a manual mechanical shutter. We loved the simplicity of gravity-fed systems and the cylindrical aesthetic, but we needed to integrate electronics (servos/sensors) to meet the Fab Academy requirements.

(Source: https://disneyworld.disney.go.com/shops/disney-springs/mm-store-orlando/)
- Inspiration 2: Commercial Vending Machines
We analyzed modern beverage machines that use spiral coils. While effective, the spiral mechanism and QR-payment systems were too complex for our project's scale. We decided to simplify the "payment" to a button/sensor trigger but keep the "automatic drop" experience.

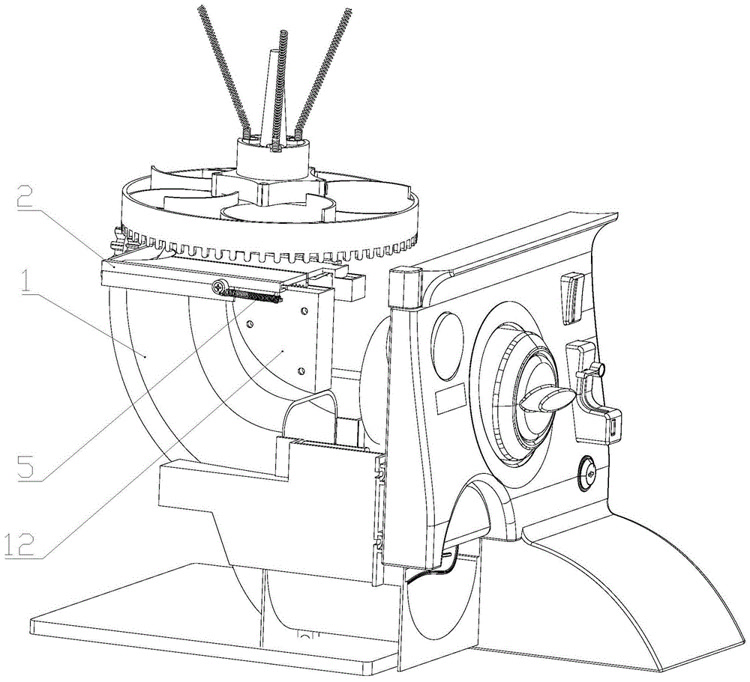
- Inspiration 3: Gashapon (Capsule Toy) Machines
We proposed studying the internal mechanics of Gashapon (Capsule Toy) machines because their architecture is perfectly optimized for rounded objects.

-
The Rotary Logic: A Gashapon machine uses a rotating internal plate with circular "pockets." Because the XIAO packaging is cylindrical, it shares the same low-friction characteristics as a capsule.
-
Self-Alignment: Cylindrical containers naturally "nest" into circular cutouts. We realized that a rotary system would allow the XIAO tubs to self-align as they drop from the storage hopper into the dispensing mechanism, minimizing the risk of jamming.

(Source: https://www.youtube.com/watch?v=Q3ZeUNDg4fQ)
Final Decision: We chose a Vertical Gravity-Fed Rotary Mechanism. It combines the visual appeal of a candy dispenser with the precision of a servo-controlled "pusher".
The Evolution: Adapting to the Project Requirements
While the Gashapon's Rotary Plate was our primary inspiration, our team had to adapt the concept to fit the compact form factor of our machine and the use of STS3215 serial-bus servos.
-
From Horizontal to Vertical: In a standard Gashapon machine, the rotary plate is horizontal. For our "XIAO Vending Machine," we discussed the trade-offs between a horizontal rotating disk and a vertical escapement system.
-
The Decision: We decided to stick with a Vertical Column (Warehouse) to maximize the use of gravity. However, the "Rotary" inspiration remained: we designed the dispensing gates to move in a curved, swinging motion (driven by the servos) that mimics the pocket-release logic of a Gashapon machine. This ensures that even though the storage is a vertical column, the "separation" of the cylindrical tubs happens through a smooth, circular mechanical path.
Overall Mechanical Structure
My focus was on designing a reliable mechanical architecture that ensures a smooth transition from storage to delivery. We moved away from the complex dual-gate idea to a more robust Platform-Scraper System.
**A. Storage & Gravity Feed **
We designed the storage warehouse as a straight vertical shaft precisely dimensioned for the cylindrical XIAO tubs. At the base of the shaft, we integrated a stationary horizontal platform (buffer). Gravity ensures that the entire stack of XIAO tubs rests on this platform, with the bottom-most tub always positioned and ready for dispensing.
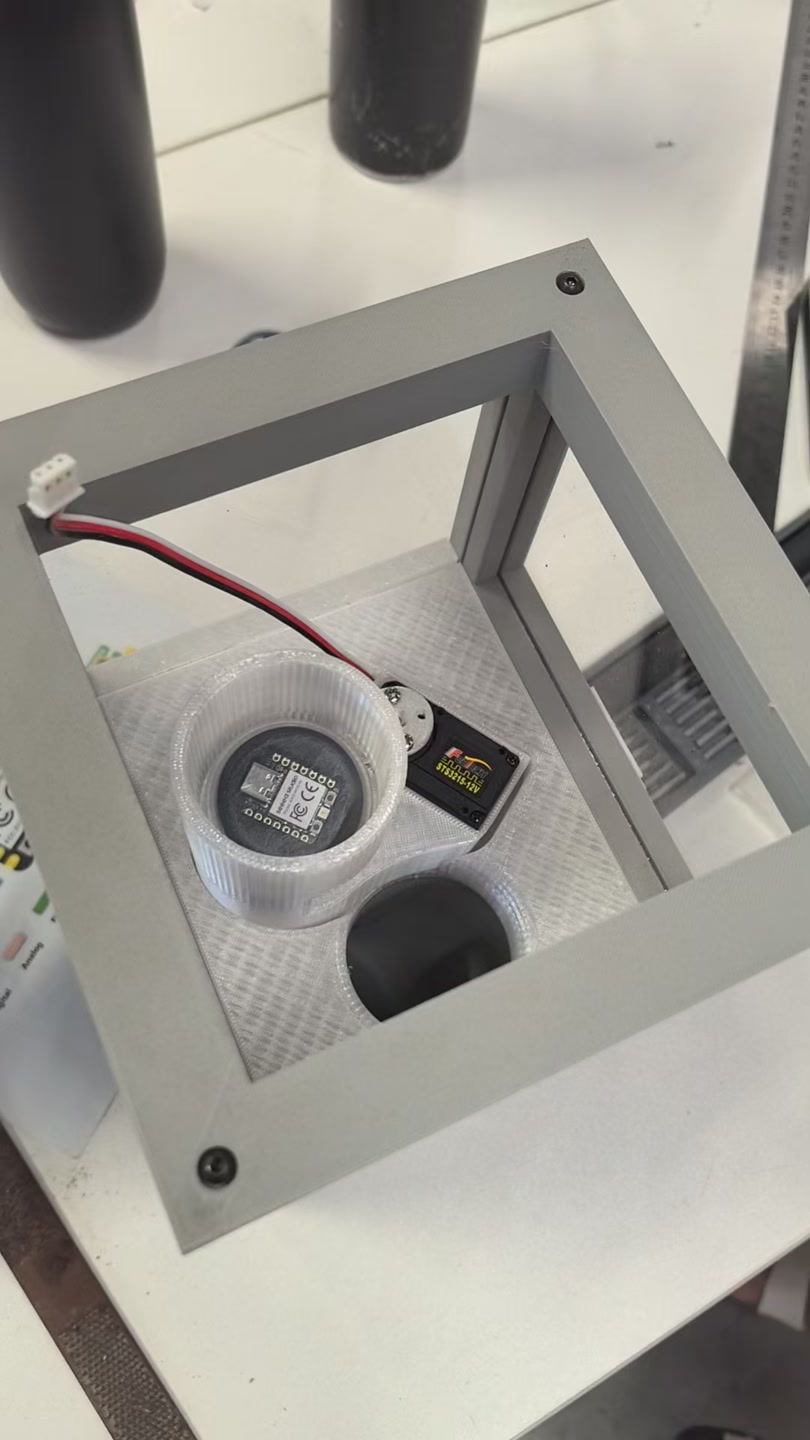
B. Servo-Driven Scraper Mechanism
To dispense the product, I designed an active "scraper" arm controlled by an STS3215 serial-bus servo.
-
The "Scraping" Action: When a successful RFID payment is verified by the Wio Terminal, the servo rotates. The scraper arm sweeps across the buffer platform.
-
Delivery Path: The arm "scrapes" the bottom-most tub off the platform and pushes it into the delivery chute (slide). Once the tub is pushed off, it slides down to the output tray via gravity.
-
Automatic Reloading: As soon as the platform is cleared and the scraper arm returns to its home position, the next XIAO tub in the warehouse automatically drops onto the buffer platform due to gravity, resetting the system for the next user.

C. Mechanical Integration & Housing
-
The Delivery Chute: We designed a smooth, angled slide positioned directly adjacent to the buffer platform. The transition between the platform and the chute was chamfered to ensure the tub doesn't catch on any edges during the "scraping" motion.
-
Structural Stability: By using the buffer platform to support the weight of the inventory, we ensured that the servo motor only needs to overcome the friction of a single tub, rather than the weight of the entire stack. This significantly increases the lifespan of the STS3215 servo and the reliability of the machine.
Summary of Architecture
This two-tier structure creates a Top-Down mechanical flow (Storage -- Scrape -- Slide) and a Centralized Bottom-Level user flow (Tap -- Read -- Collect). By separating the tall storage column from the interactive components, the design achieves a compact footprint while keeping the interface at a convenient level for the user.
