RAMESH BOMMIDI
Mechanical Engineer
Weekly Assignments
Week_1 Assignment
Project Management
See Details
Week_2 Assignment
Computer Aided Design
See Details
Week_3 Assignment
Computer Controlled Cutting
See Details
Week_4 Assignment
Embedded Programming
See Details
Week_5 Assignment
3D Scanning and Printing
See Details
Week_6 Assignment
Electronic Design
See DetailsFinal Project
Project Title
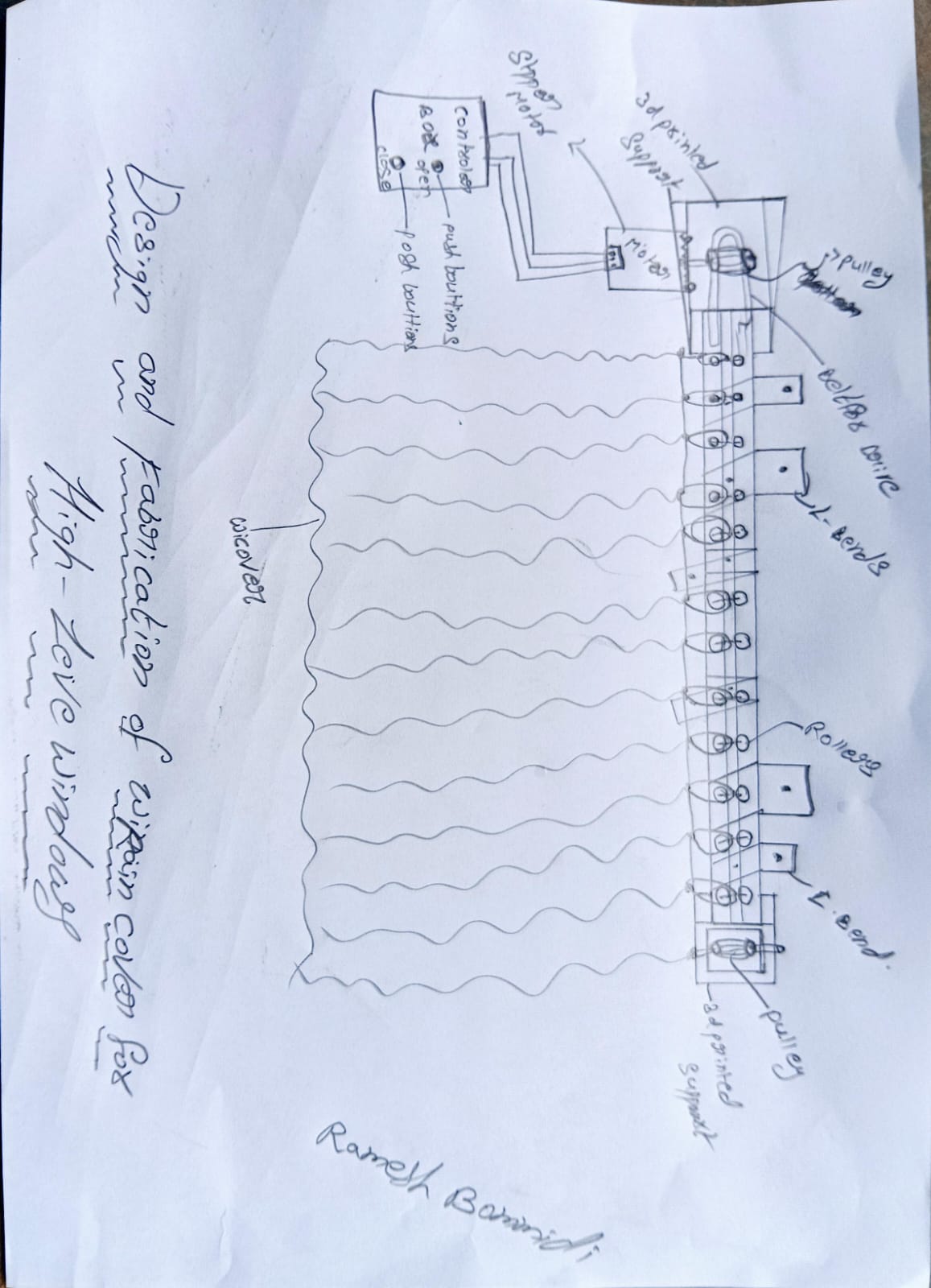
Design and Fabrication of WiRain Cover for High-Level Windows

Abstract
- The WiRain Cover project addresses the problem of rainwater intrusion through high-level windows, which can damage equipment and disrupt indoor comfort. This project proposes a smart, automated sliding rain protection system made of a durable plastic sheet mounted on a rail mechanism. The system offers dual control modes: manual operation via push buttons and remote control through a Wi-Fi-enabled interface, ensuring flexibility and ease of use. Designed to prevent water ingress while maintaining airflow and visibility, the WiRain Cover demonstrates the integration of mechanical design, embedded systems, and wireless communication. Future enhancements could include automatic rain sensing and smart building integration, making it a scalable and practical solution for protecting elevated windows.
sketch of my final project :