- Week 1 : Project Management
- Week 2 : Computer-aided
- Week 3 : Computer Controlled Cutting
- Week 4 : Embedded Programming
- Week 5 :3D Scanning and Printing
- Week 6 : Electronic Design
- Week 7 : Computer Controlled Machining
- Week 8 : Electronics Production
- Week 9 : Input Devices
- Week 10 : Output Devices
- Week 11 : Networking and Communication
- Week 12 : Mechanical Design and Machine Design
- Week 14 : Molding and Casting
- Week 15 : Interface and Application Programming
- Week 16 : System Integeration
- Week 17 : Wildcard Week
- Week 18 : Applications and Implications, Project Development
- Week 19 : Invention, Intellectual property and Income
- Week 20 : FInal Project Requirements
Week 20 : Final Project Requirements
Objectives of the Week
Final Project Page
Bill of Materials (BoM)
The following table summarizes the major components used in the development of the Line Following Robot. The costs are approximate and may vary depending on supplier and procurement quantity.
| S.No | Component | Description | Quantity | Unit Cost (₹) | Total Cost (₹) |
|---|---|---|---|---|---|
| 1 | XIAO ESP32-C3 | Main microcontroller for robot control and processing | 1 | 750 | 750 |
| 2 | Custom Fabricated PCB | Main control and sensor interface boards | 2 | 150 | 300 |
| 3 | BO Gear Motors | DC geared motors for locomotion | 2 | 180 | 360 |
| 4 | Robot Wheels | Compatible wheels for BO motors | 2 | 60 | 120 |
| 5 | L298N Motor Driver | Dual H-Bridge motor driver module | 1 | 180 | 180 |
| 6 | 5-Channel IR Sensor Array | Line tracking sensor module | 1 | 250 | 250 |
| 8 | JST Connectors & Wiring | Interconnection cables and connectors | 1 Set | 150 | 150 |
| 9 | Header Pins | Male and female pin headers | 1 Set | 50 | 50 |
| 10 | Acrylic Chassis | Laser-cut structural base frame | 1 | 150 | 150 |
| 11 | Rechargeable Battery Pack | Power source for the robot | 1 | 400 | 400 |
| 12 | Fasteners | Screws, nuts, spacers, and mounting hardware | 1 Set | 100 | 100 |
Total Estimated Cost: ₹2,810
The overall cost was kept low by utilizing in-house fabricated PCBs, laser-cut acrylic components, and readily available educational robotics hardware. The design emphasizes affordability, ease of assembly, and suitability for learning embedded systems, PCB design, and autonomous mobile robotics.
All PCB design files, source code, CAD models, fabrication files, and documentation are included within the project archive available on this page.
System Integration
Hardware Integration
All components are mounted on a custom single-layer PCB. The Seeed XIAO collects joystick data, displays output on the OLED, and drives LEDs using a GPIO pin.
Software Integration
Arduino firmware reads inputs, updates outputs, and sends serial data to Processing for visualization. Code is modular and handles multiple tasks simultaneously.
Power Management
Battery powers the whole system via an AMS1117 regulator. Charging and programming are done via USB-C breakout.
Presentation Files
Related Weekly Assignments
- Computer Aided Design
- Computer Controlled Cutting
- Electronic Design
- Electronics Production
- Embedded Programming
- Networking and Communication
- Mechanical Design and Machine Design
- Interface and Application Programming
- System Integration
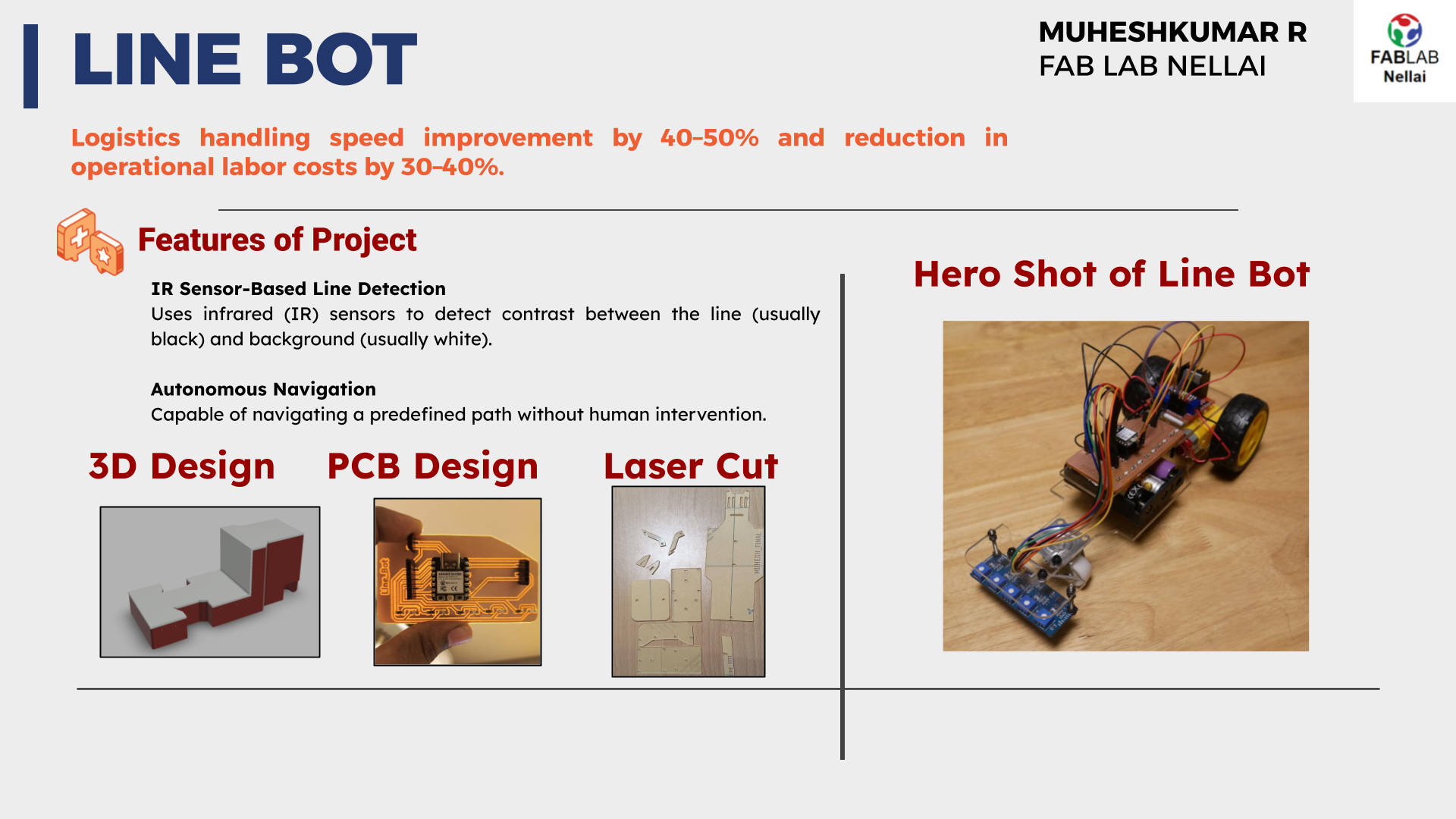
Final Project Hero Shot
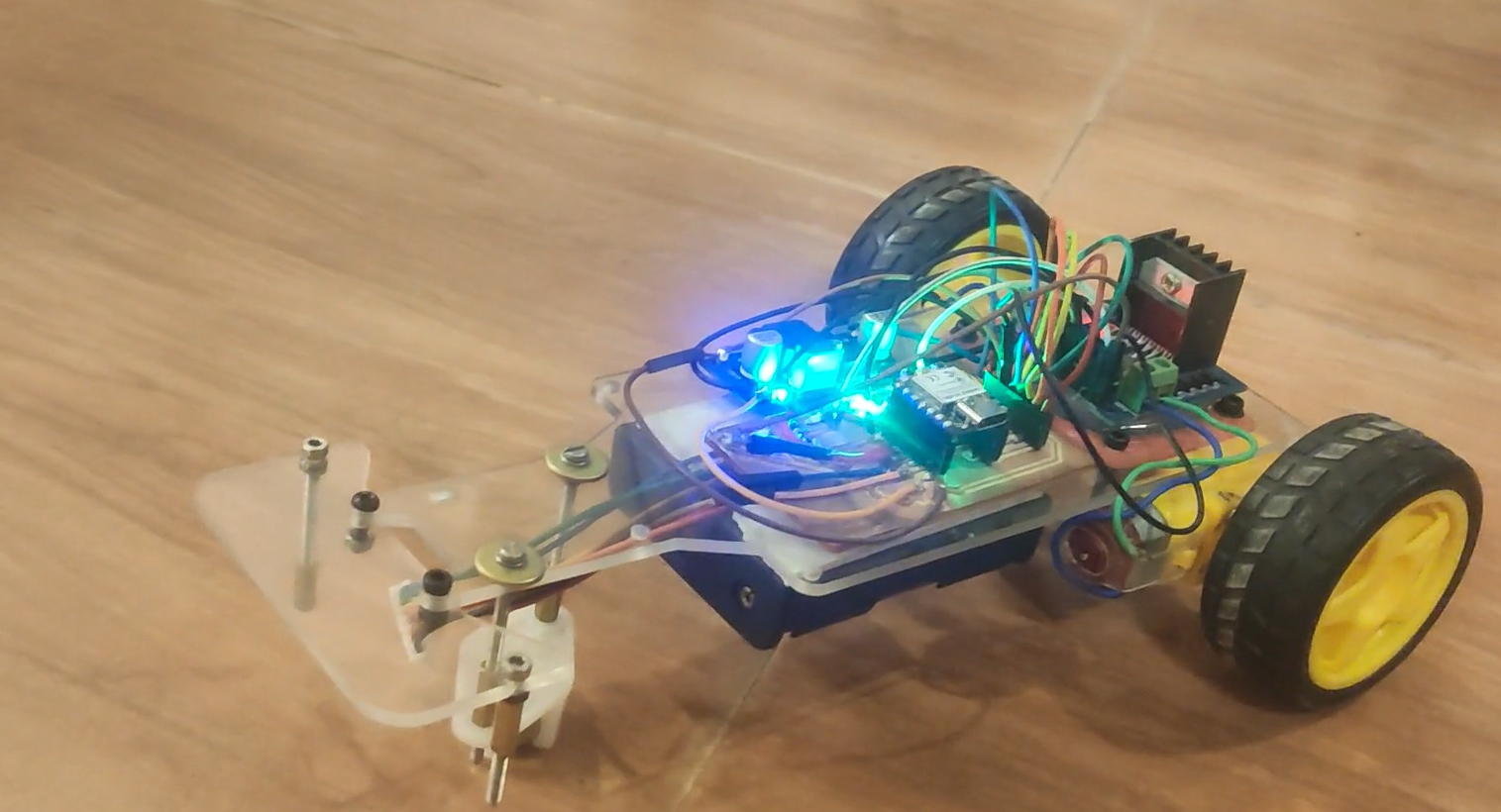
Final integrated Line Bot prototype demonstrating line detection, custom electronics, embedded control, and mechanical integration.
License
This project is released under the Creative Commons Attribution 4.0 International (CC BY 4.0) license.
Line Bot © 2025 by Muheshkumar R is licensed under Creative Commons Attribution 4.0 InternationalAcknowledgements
- Fab Academy Instructors – Guidance in electronics, design, and integration.
- All Local Instructors – Mentoring and strategic support.
- FabLab Nellai Team – Tools and technical support.
- Open-source Community – Libraries and reference codes.
- Peers and Classmates – Feedback and collaboration.
Project Files and Resources
To ensure reproducibility and open-source accessibility, all design files, source code, and project documentation related to the Line Bot project are provided below. These files allow anyone to understand, modify, fabricate, and further develop the system.
Source Code
Electronics Design Files
Mechanical Design Files
All files have been developed as part of the Fab Academy final project and are provided to support documentation, replication, future development, and educational use.