Week 19
Project Presentation
Task: Project Development
Prepare drafts of your final project summary slide (presentation.png, 1920×1080) and video clip (presentation.mp4, 1080p HTML5 format, ~1 minute, <25 MB). Ensure both files are placed in the root directory of your project folder.
Develop a plan for dissemination of your final project
Complete your final project, tracking your progress:-
To share and promote the Color Sorting Robot, the following dissemination plan has been developed:
1. Plan for Dissemination of Final Project
• Fab Academy Archive:
Submit all documentation, source files, videos, and the final slide to the Fab Academy archive to ensure global access and peer visibility.
• Project Website / Git Repository:
Upload all design files, PCB schematics, Arduino and Python code, STL/DXF files, and a step-by-step build guide to a public GitHub repository and a dedicated project page.
• Video Demonstration:
Publish the final demonstration video (1-minute format) on FabLab channels.
• Live Demo and Poster Presentation:
Present the project during the local FabLab or institutional demo day with a working prototype and printed poster.
2. Final Project Completion and Tracking
✅ What Tasks Have Been Completed?
✅ Project idea finalized and components selected.
✅ Mechanical design completed using CAD.
✅ Conveyor fabricated via laser cutting and assembled.
✅ Color detection using OpenCV successfully implemented.
✅ Servo and DC motor control programmed using Arduino IDE.
✅ Custom PCB designed, milled, and tested.
✅ System integration done and functional.
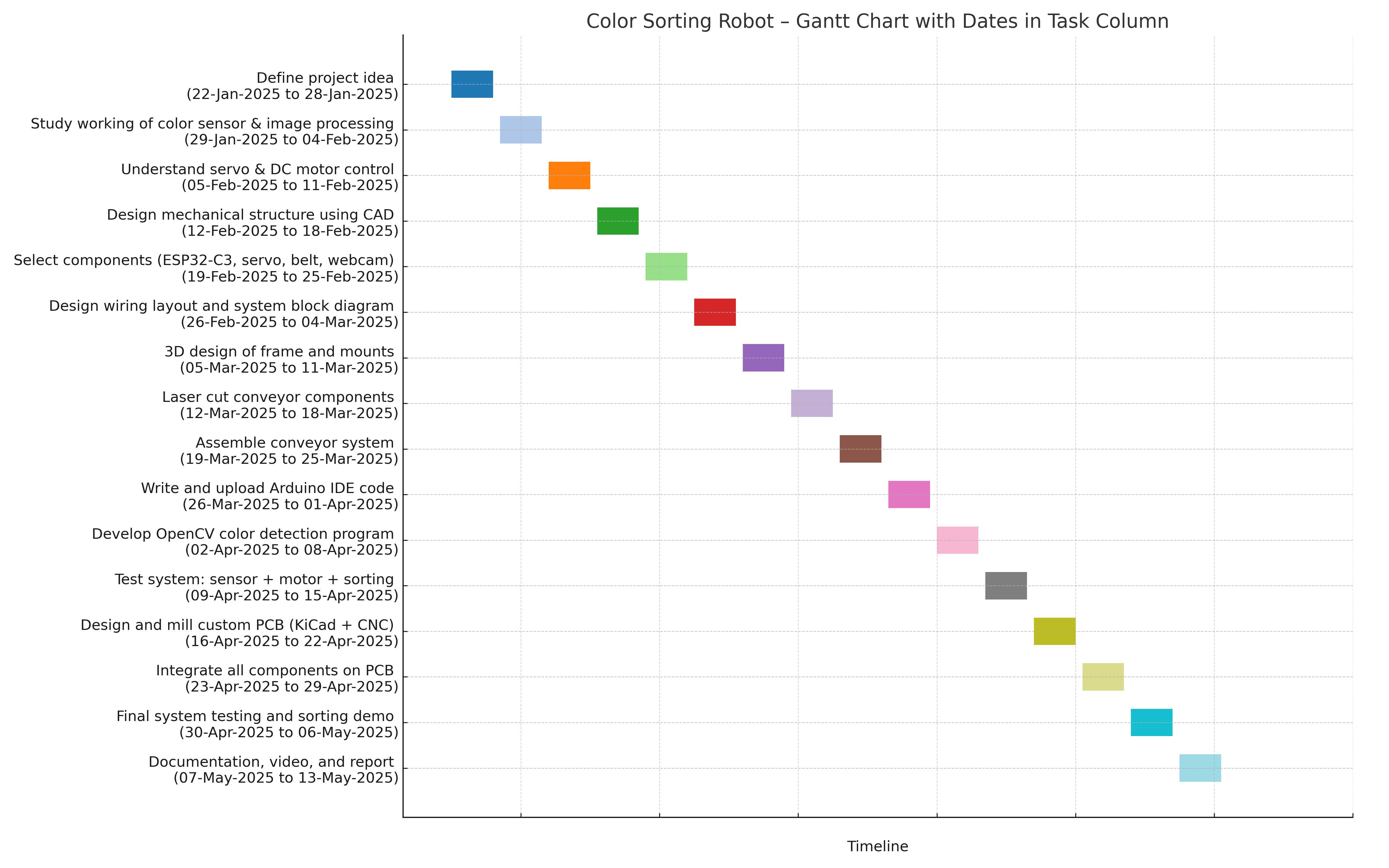
✅ Final Gantt chart, documentation, and planning slide prepared.
3. What Tasks Remain?
❗ Final video editing and formatting for presentation.mp4
❗ Uploading all files to the Fab Academy repository and checking links
❗ Review of final report and compliance checklist
❗ Final testing for continuous sorting over long durations
4. What's Working?
• Real-time color detection using webcam and OpenCV.
• Accurate sorting of red, green, and blue objects using servos.
• Smooth conveyor belt movement with DC motor.
• Reliable communication between PC and microcontroller.
5. What's Not (or Needs Refinement)?
• Servo occasionally misses position due to sudden signal lag.
• Motor response needs better PWM tuning under heavier loads.
• Object alignment on conveyor may need a side guide.
6. Questions to Be Resolved
• Can object detection be improved with better lighting or camera angle?
• Should sorting be done dynamically (while object is moving) or in stop-and-sort mode?
• How many objects per minute can it sort reliably?
7. What Will Happen When?
• This Week: Final tests, video recording, and editing.
• Next Week: Upload final files and check Fab Academy links.
• Before Deadline: Present the live demo and finalize evaluations.
7. What I Have Learned?
• How to integrate electronics, mechanical, and programming into a single functional system.
• How to control real-world objects using computer vision.
• Project planning through Gantt charts and documentation discipline.
• PCB design and fabrication using KiCad and CNC.
• The importance of debugging, iteration, and interdisciplinary knowledge.
