11. Machine design¶
Planning¶
Tasks - Must¶
- In group: Design a machine that includes mechanism + actuation + automation
- In group: Build the mechanical parts and operate it manually.
- In group: Document project
- Document your individual contribution.
Execution¶
In our initial brainstorming session we came up with multiple machine ideas and after discussing them we agreed to build a motion wall.
The idea is inspired by the installations of Daniel Rozin. In our motion wall there will be multiple mechanical elements that can create different patterns and animations based on their orientation.
On the first day we made two prototypes to choose the design of our mechanical elements. We made a prototype with rotating pointers and one with tilting pixels.
Tilting pixels servo bracket ¶
I worked on the tilting pixels prototype. We decided to use servo motors to move our mechanical elements but we had to find a way to use the servo motor to tilt a pixel.
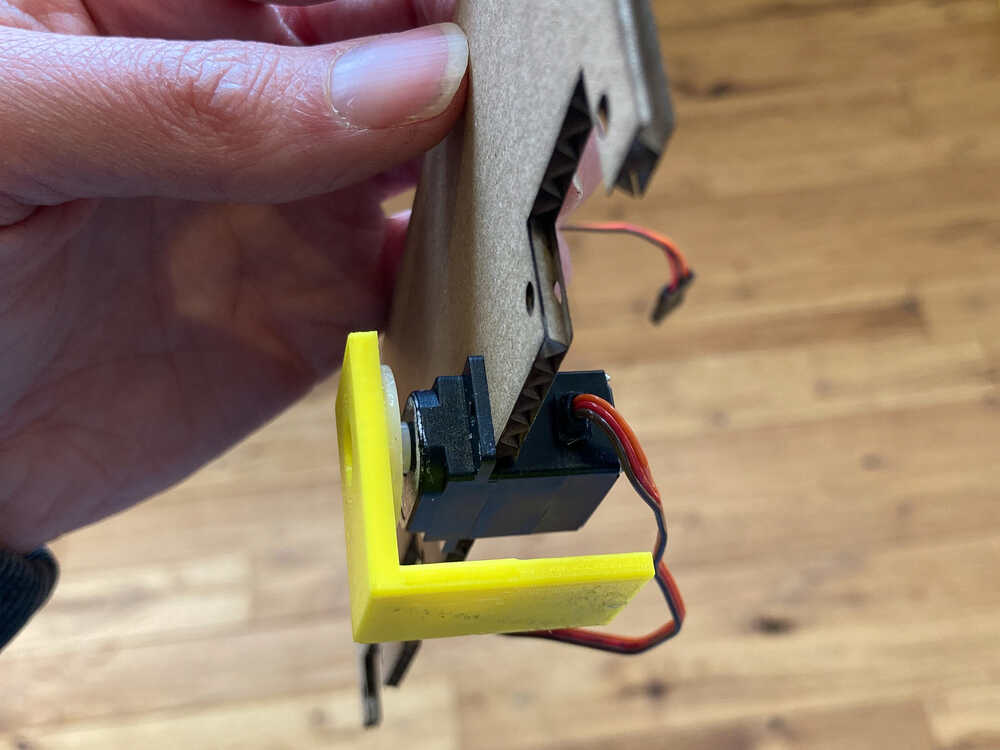
I reused the yellow L bracket from the servo pan tilt head I made in the CAD week. I designed a fixing plate to hold the servos in place and laser cut a cardboard prototype.
rotation axis
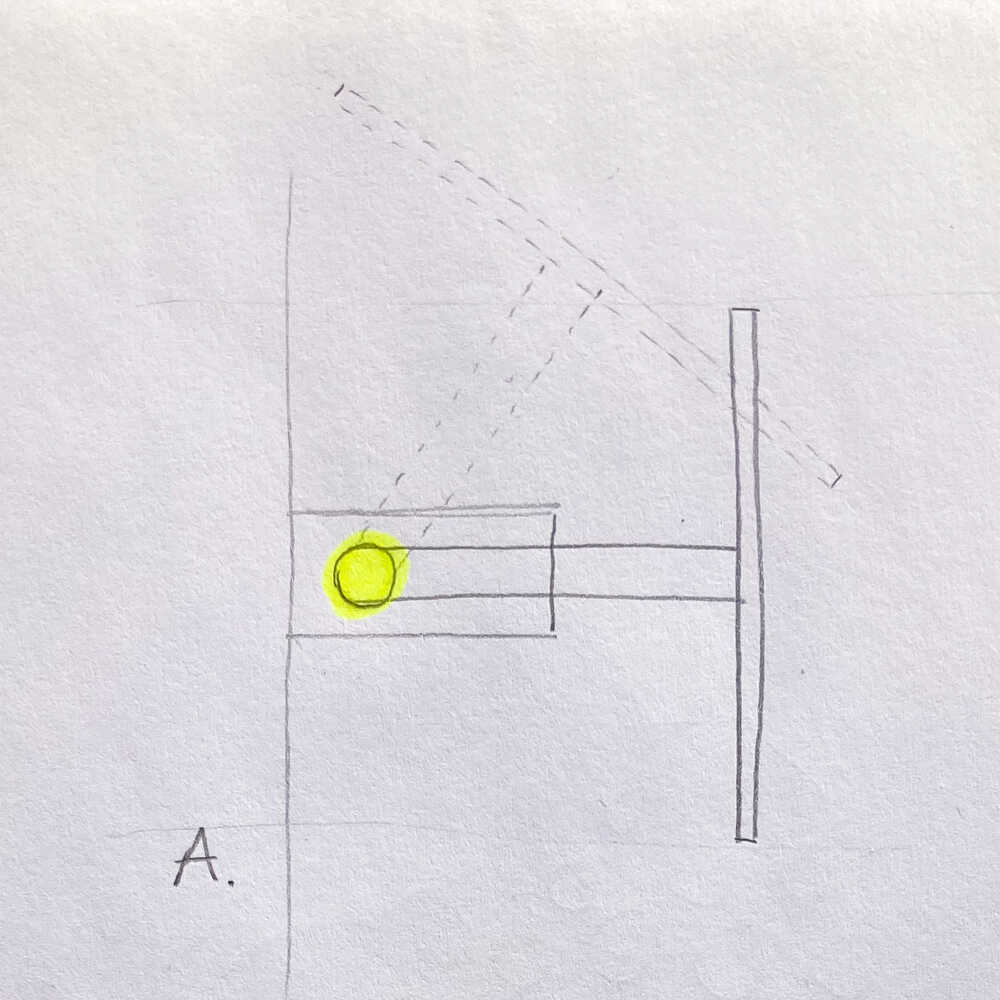
With this design the rotation axis (marked in yellow) is close to the back plate. This makes the pixel move up and down. This is not ideal as we would have to leave a lot of space between pixels to avoid collisions. It would be better to have the rotation axis closer to the pixel so that it tilts instead of moving up and down.
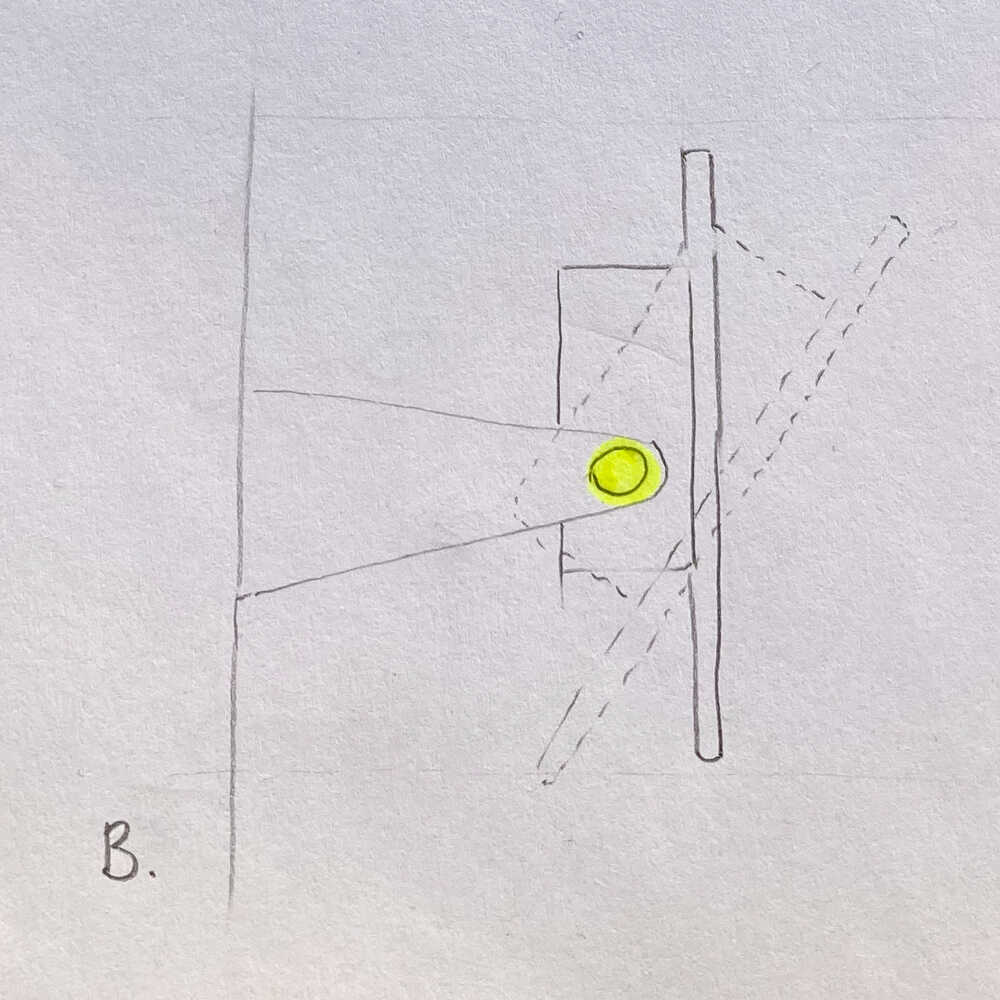
To have the rotation axis as close to the pixel as possible I decided to attach the servo to the pixel instead of the back plate.
I designed the bracket to attach the servo to the back plate and 3D printed a prototype.
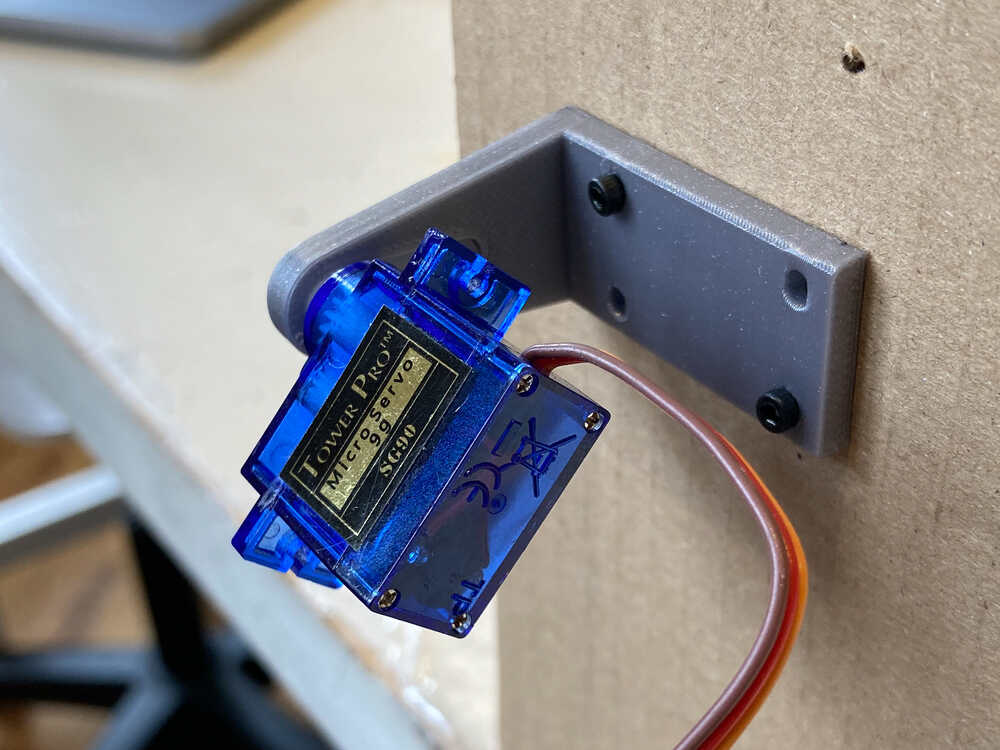
This design worked well :-)
We used a slightly modified version of this bracket in our final machine. Joany modified the design to include a hole to pass the servo cable through.
Arduino mega servo shield ¶
We found ~30 servo motors in our Lab so that’s the number of pixels we’re aiming for. We decided to use an Arduino Mega to control them as it has more than enough I/O pins.
We have to power the servos from an external power supply as the Arduino board is not able to provide enough current to run all the servos. We have to make a lot of connections: 30 servos * 3 wires = 90 connections.
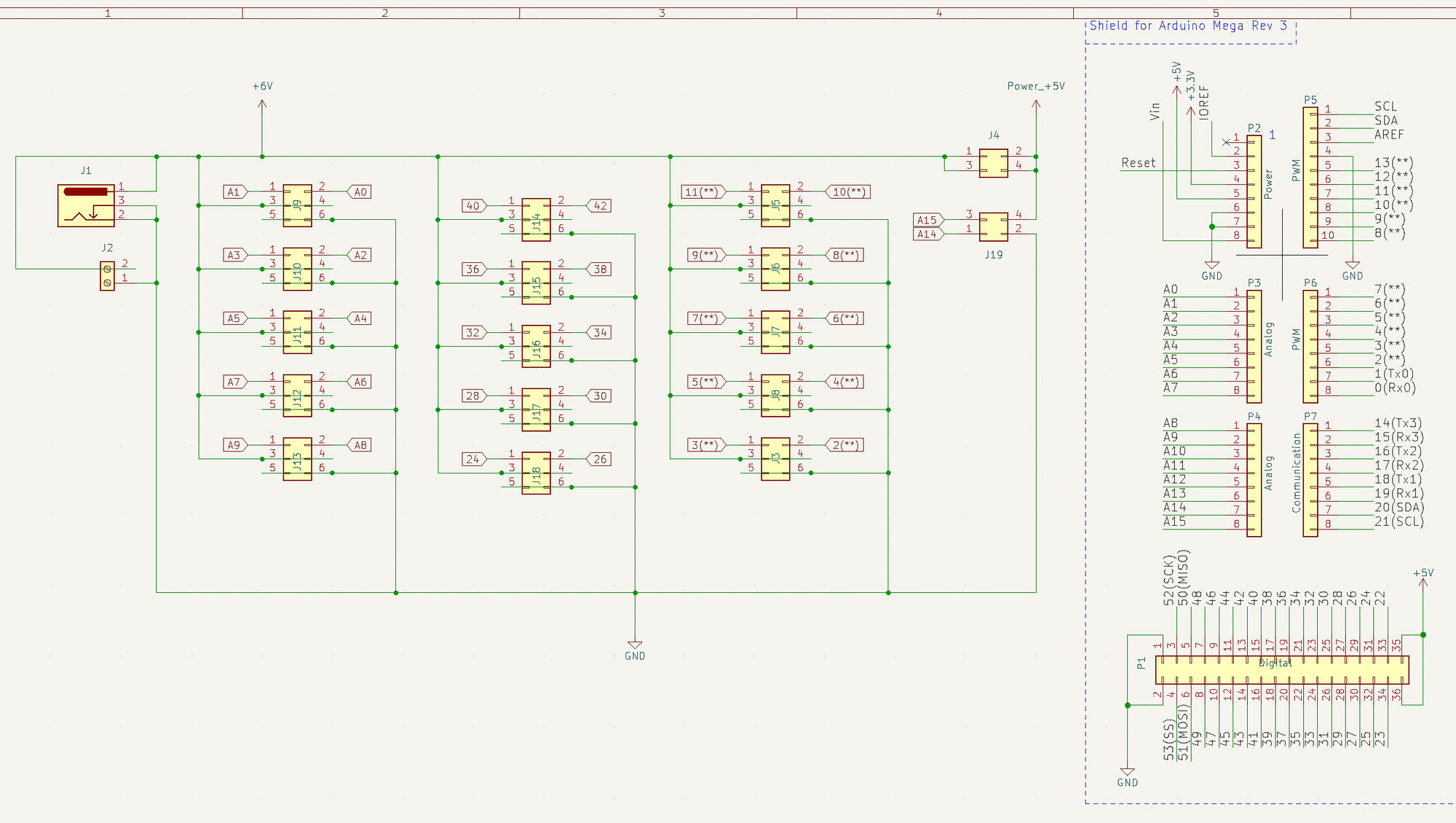
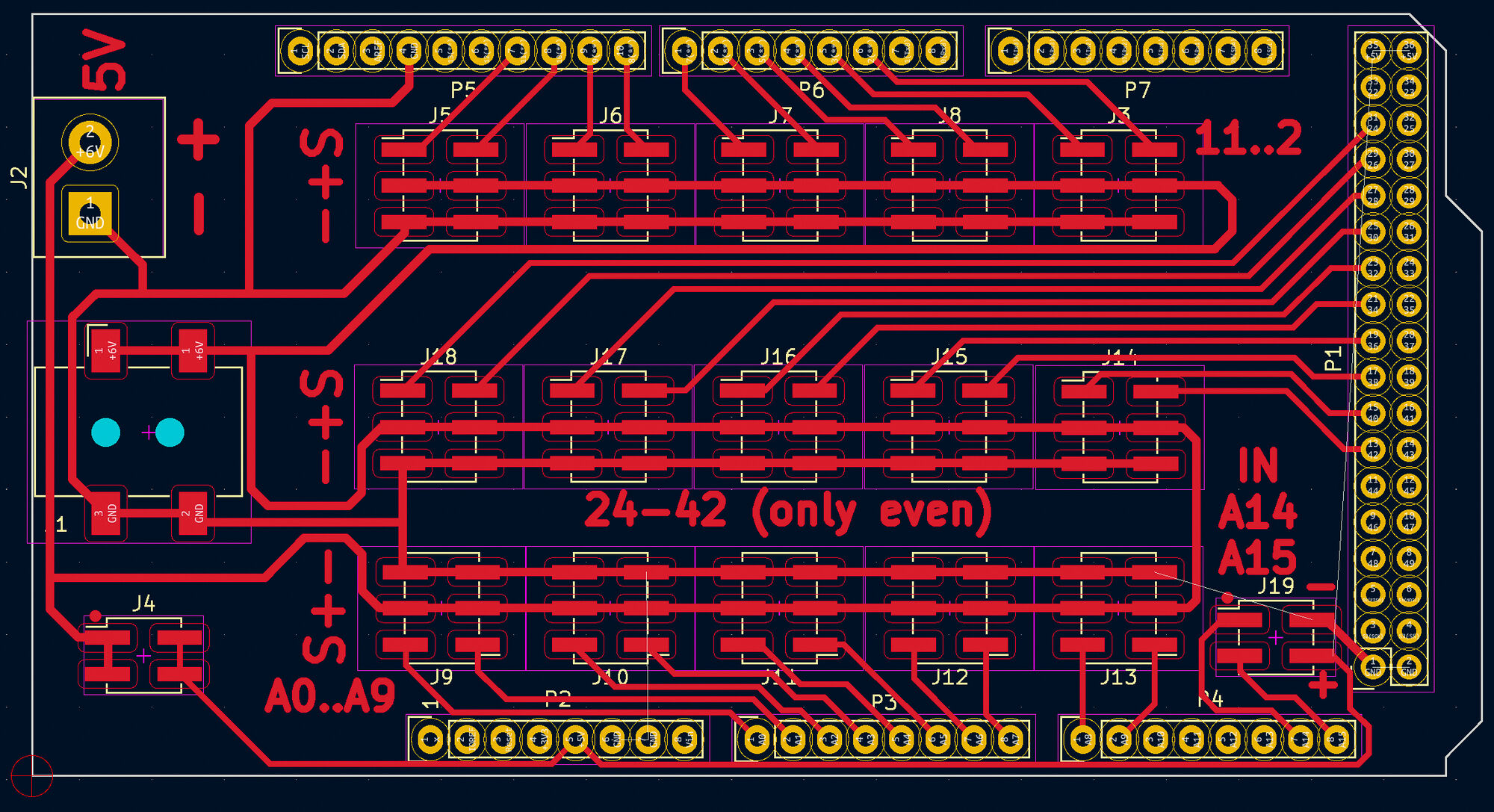
I decided to create an Arduino Mega shield to make external powering and hook-up of the servos easy.
KiCad has an Arduino Mega - Extension Board template (File > New project from template...) that made it easy to get started with the shield.
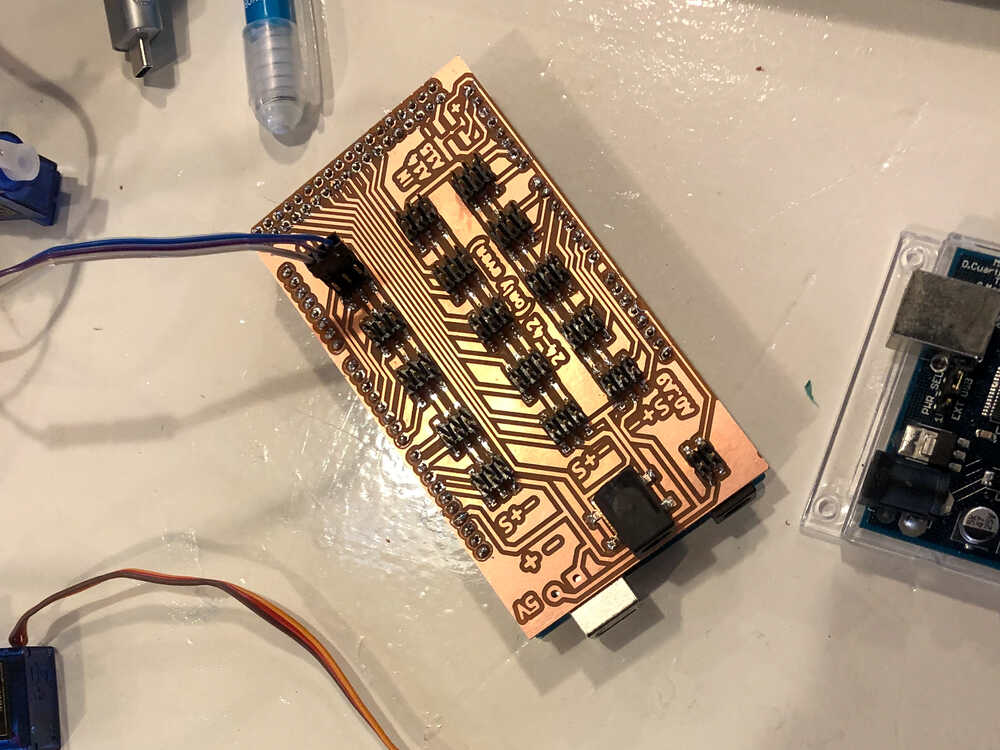
And this is how it looked once Bente did mill ans stuff it:
Backplate ¶
Joany made the backplate designs for all the prototypes. The day we started the assembly of the final machine Joany was not available so I made a backplate design using openscad.
Basted on the prototypes and testing we wanted the final machine to
- Use ~24 servo motors
- Have hexagonal pixels
I made a backplate design for 24 servos and one for 23 to have two options to choose from. This is the one for 24:

And this is the one for 23:

In the final machine we used the second design.
Retrospective¶
During the 2 weeks we had to build the machine I was abroad. I was able to contribute remotely to the project but I couldn’t come to the waag.
I was really excited about building a machine and at times it was disappointing to be unable to come to the lab and help with the physical construction of our machine. In the past weeks I really liked the process of getting the machines to create physical objects from the designs and then assemble the different parts.
Even though it wasn’t ideal to be remote I feel like I made the best out of it as I still managed to make some good contributions.
I really enjoyed working in our team: Communication was easy, everyone was motivated and we managed to distribute the tasks well. It really helped to have regular standups in the morning to discuss the plans for the day.
I’m super happy with the motion wall we managed to build in this short time :-)
Other inspiring machines¶
- Madrid - Solaser
- Hong Kong - RoboMaid
- Amman - Clay forming machine
- Detroit - Foam Creawler
- Kochi - Product video taking setup
- Shanghai - FABCUP