Applications and Implications
- Propose a final project masterpiece that integrates the range of units covered
My plan is to develop the Motorized translational microscopic stage. For the experiments I'm doing with optical tweezers, sample movements have to be precisly controlled. For this purpose, 2 or 3-dimensial motorised stages are usually used. Unfortunately, the price of these kind of stages is quite high, plus they can't be freely adjusted to different kind of setups.
The gold standard of reliable stages are commercially produced solustions with a special software to control the movements of the stage. One good option is Thorlabs XYZ stage. The price of this stage goes up to thousands of euros. My idea is to create the cheaper analoge of XY stage.

Fig 1. Example of the comercial translational XYZ stage.
I would HIGHLIGHT the projects:
However, for my purpose the embedded backlight is neccessary, and I hope for the lower total costs.
I'm still thinking about the proper design of the stage and its control, therefore I have to dedcide on the stepper motors types to use. In case I will need the stepper motor of higher performance or some extra components I'm goind to order them from Digikey (delivery takes about 1 week).
The preliminary cost estimation of the materials is about 92.78 EUR, plus some extra components for PCBs, Ip hope will male a total price about 100 EUR. The final updated list of components will be posted on the Project Development page.
Preliminary list of components:
| Component | Properties/Function | Qty | Buy/Produce | Price, EUR |
|---|---|---|---|---|
| ROB-10846 Stepper motor | 3A, 400 steps | 2 | Digikey | 33,08 EUR |
| Threaded rod or lead screw | Pitch 2 mm , length 300 mm | 2 | Available at local Fablab | ≈10 |
| Flexible 8mm - 5mm coupler | Coupler between the motor shaft and threaded rod | 2 | Available at local Fablab | ≈2 |
| Stainless rods | Holding the construction | 5 | Available at local Fablab | 6 |
| ???Limit switch DG23-B1LA | 3 | Digikey | 9.12 | |
| Ball bearing | Holding the moving stages on the metal rods | 6 | Available at local Fablab | ≈2 |
| NEOPIXELs or White LED Backlight Module | Backlight | 1 | Digikey | 2.30 |
| TMC2209 SILENTSTEPSTICK | STEPPER MOTOR DRIVER (Smooth microstepping up to 1/256 step!!!) | 2 | Digikey | 27.10 |
| ATtiny44 | Motor and backlight control | 1 | Available at local Fablab | 1.18 |
Design will incorporate the following fabricated parts:
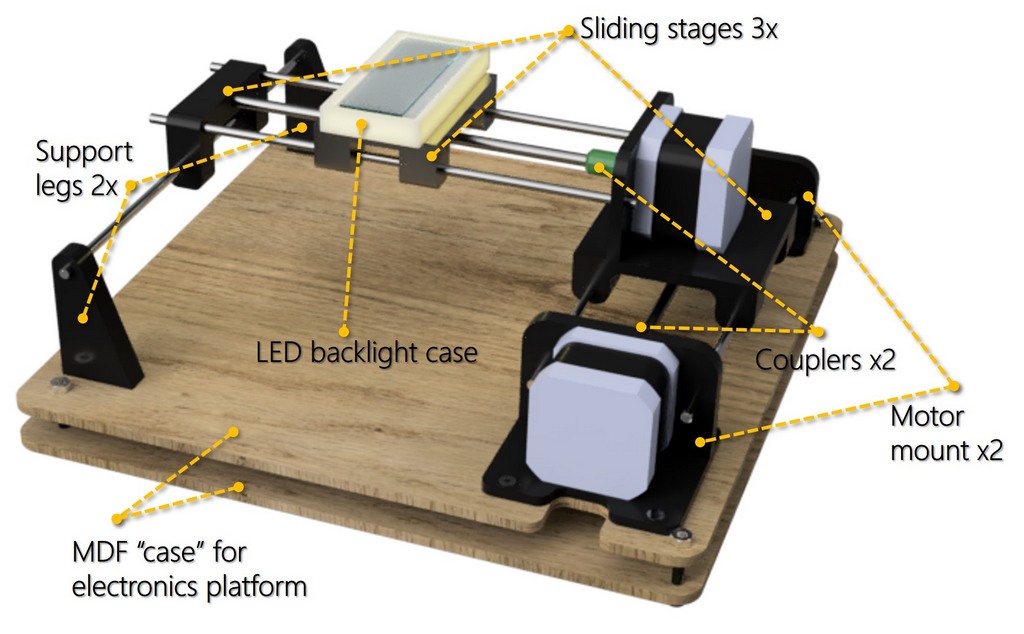
Fig 2. Preliminary Design of the motorized XY stage
The stage performance will evaluated in terms of precision and resolution of the mechanical movement, particularly in terms of the horizontal (XY plane) direction.
Usefull link for calculation the number of steps for the system:
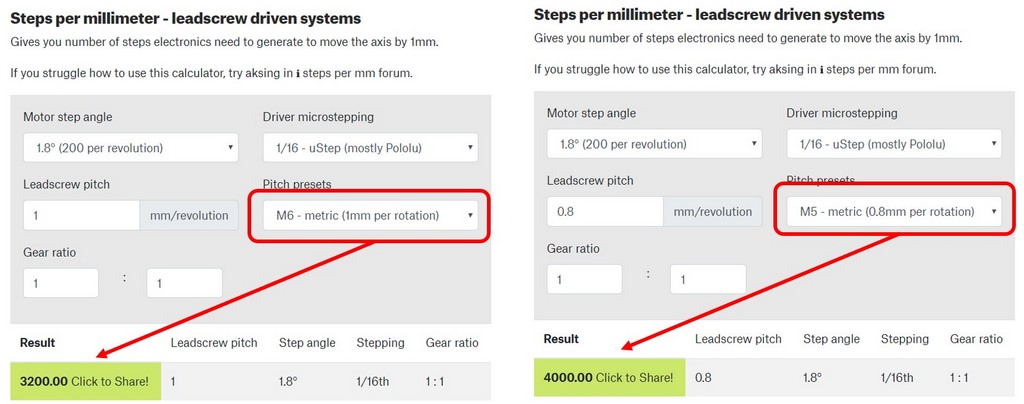
Fig 1. Calculation of number of steps electronics need to generate to move the axis by 1 mm.
| Leadscrew pitch, mm/rev | Full step | 1/2 | 1/4 | 1/16 |
|---|---|---|---|---|
| M6 (1 mm) | 5 um | 2.5 um | 1.25 um | 0.31 um |
| M5 (0.8 mm) | 4 um | 2 um | 1 um | 0.25 um |
