12. Mechanical design, machine design¶
Group assignment:¶
-
Design a machine that includes mechanism + actuation + automation + application
-
Build the mechanical parts and operate it manually.
-
Actuate and automate your machine.
-
Document the group project
To see our group assignment click here
Individual assignment:¶
- Document your individual contribution.
12. Mechanical design, machine design¶
Group assignment:¶
-
Design a machine that includes mechanism + actuation + automation + application
-
Build the mechanical parts and operate it manually.
-
Actuate and automate your machine.
-
Document the group project
To see our group assignment click here
Individual assignment:¶
- Document your individual contribution.
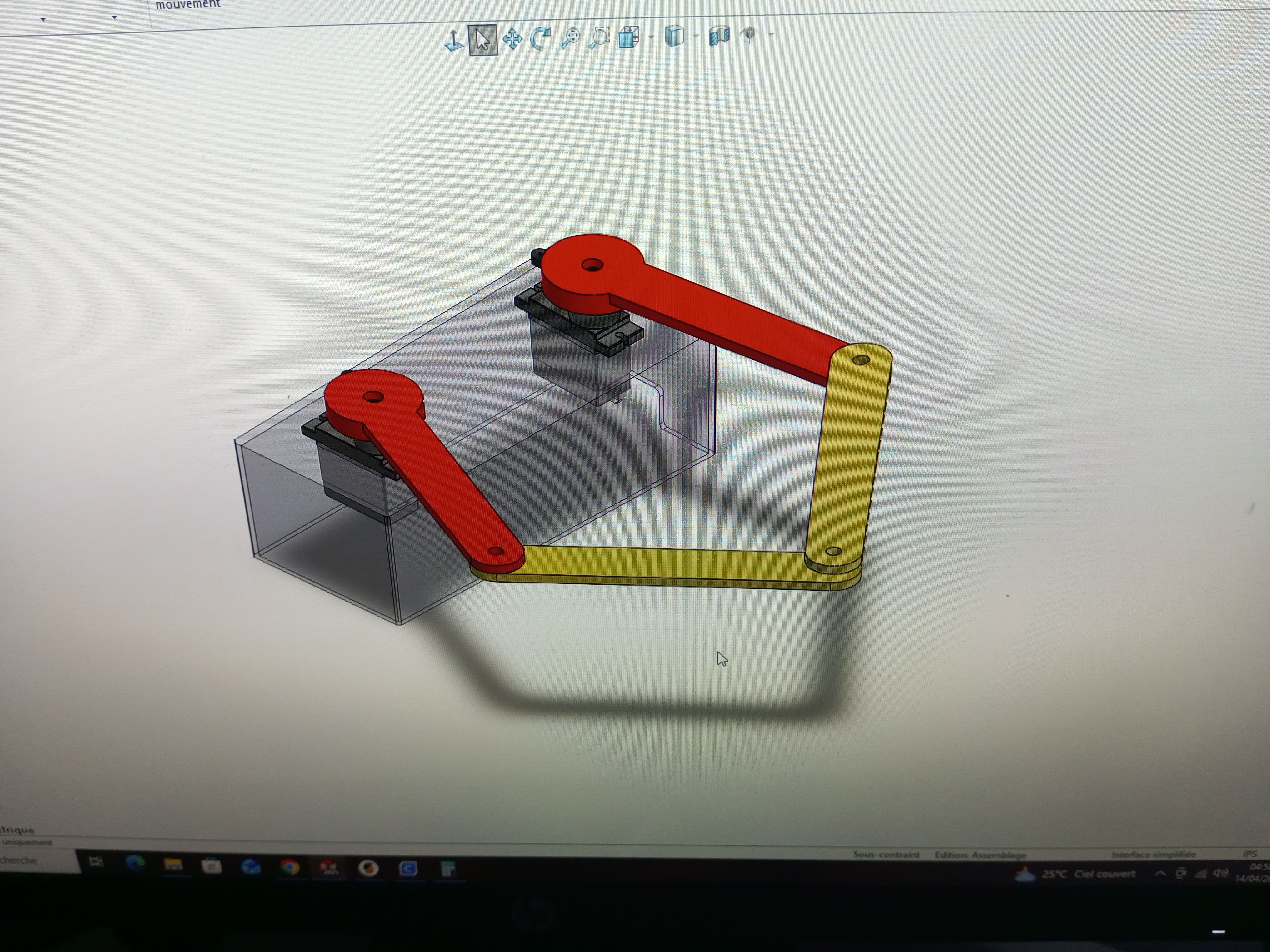
Introduction¶
For this project, I designed a SCARA robot capable of drawing.
The robot can be controlled in two different ways:
- Using servo motors
- Using two MCC modules
This project is related to robotics, embedded systems, and digital fabrication.
It helped me improve my skills in:
- 3D modeling
- Mechanical assembly
- 3D printing
- Electronics integration
- Robot control systems
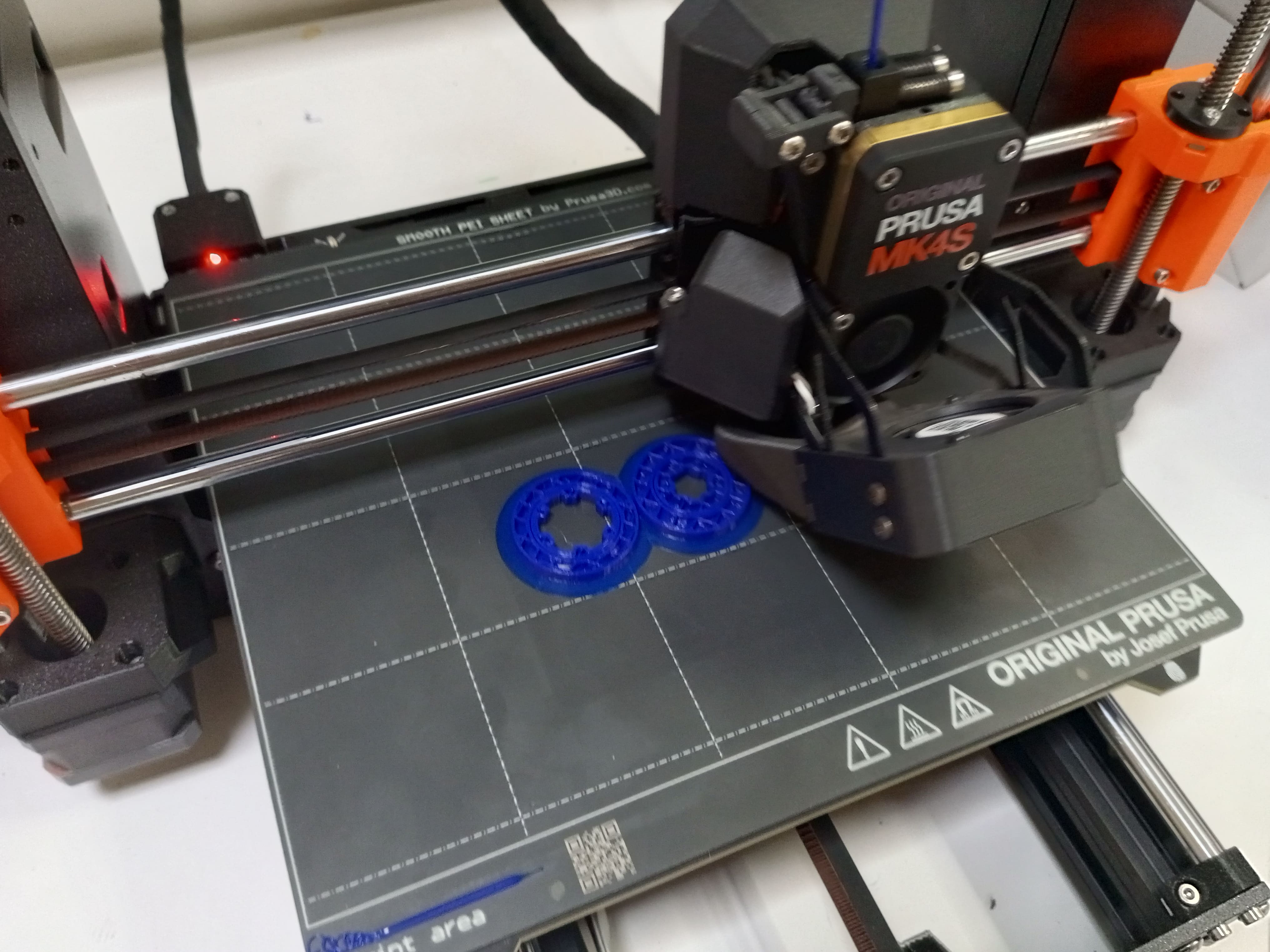
2. 3D Printing Process¶
After completing the design, I started printing the different parts of the SCARA robot using a 3D printer.
Printed parts include: - Robot arms - Base structure - Motor supports - Pen holder
The printing parameters were adjusted to obtain better precision and stronger parts.
 ¶
¶
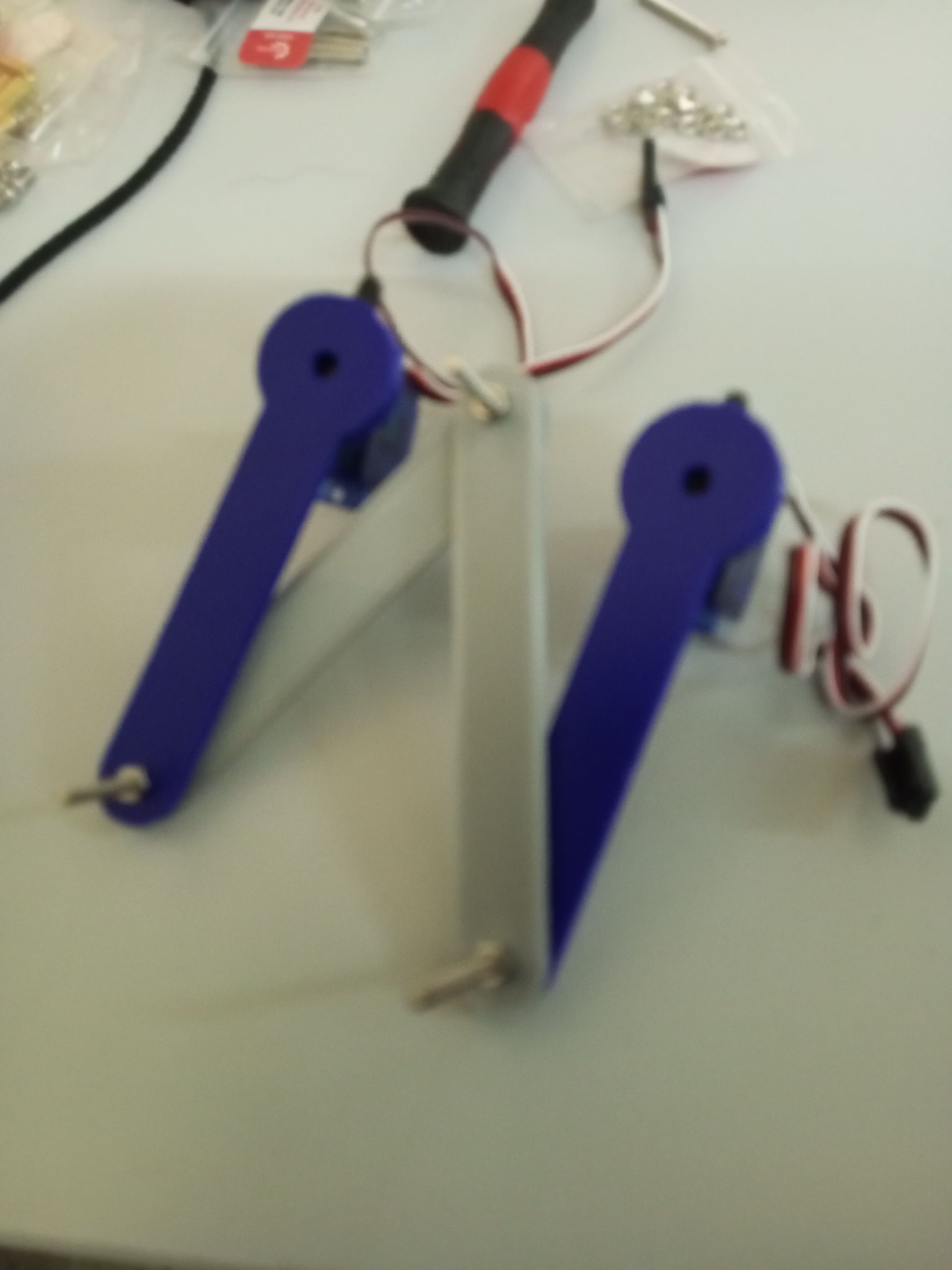
3. Assembly Process¶
After printing the parts, I assembled the different components of the robot.
Assembly steps: - Fixing the servo motors - Connecting the robot arms - Installing the drawing mechanism - Verifying the movement of the joints
This step allowed me to test the mechanical behavior of the robot.
 *
*
Glue Gun Usage in the Project¶
The glue gun was used during the assembly process of the project to fix and secure different components together.
A glue gun is a tool that melts glue sticks using heat and applies hot adhesive material to surfaces.
Main uses in the project: - Fixing electronic components - Holding wires in place - Reinforcing mechanical parts - Temporary or permanent assembly
 ¶
¶
4. Final Product¶
The final SCARA robot was successfully assembled and tested.
Main functions: - Drawing capability - Motor control - Mechanical movement demonstration
The robot can reproduce movements and draw shapes using the pen system.

5. Video Demonstration¶
Several videos were recorded to demonstrate: - The robot movement - The drawing process - Servo motor operation - Final system functionality