Week 12 - Machinery and Mechanical Design¶
The theme of this week is Mechanical Design , which is also closely related to the machine design in the next stage. Mechanical design is not just about drawing a shell or a part, but about making the structure, actuator, control system, functional objectives, and user interaction work together to ultimately form a machine that can operate.
This week's group assignment requires designing a machine that includes mechanism + actuation + automation + function + user interface , and fabricating the mechanical part to enable it to operate manually first. Additionally, it is necessary to document the group project and each individual's contributions.
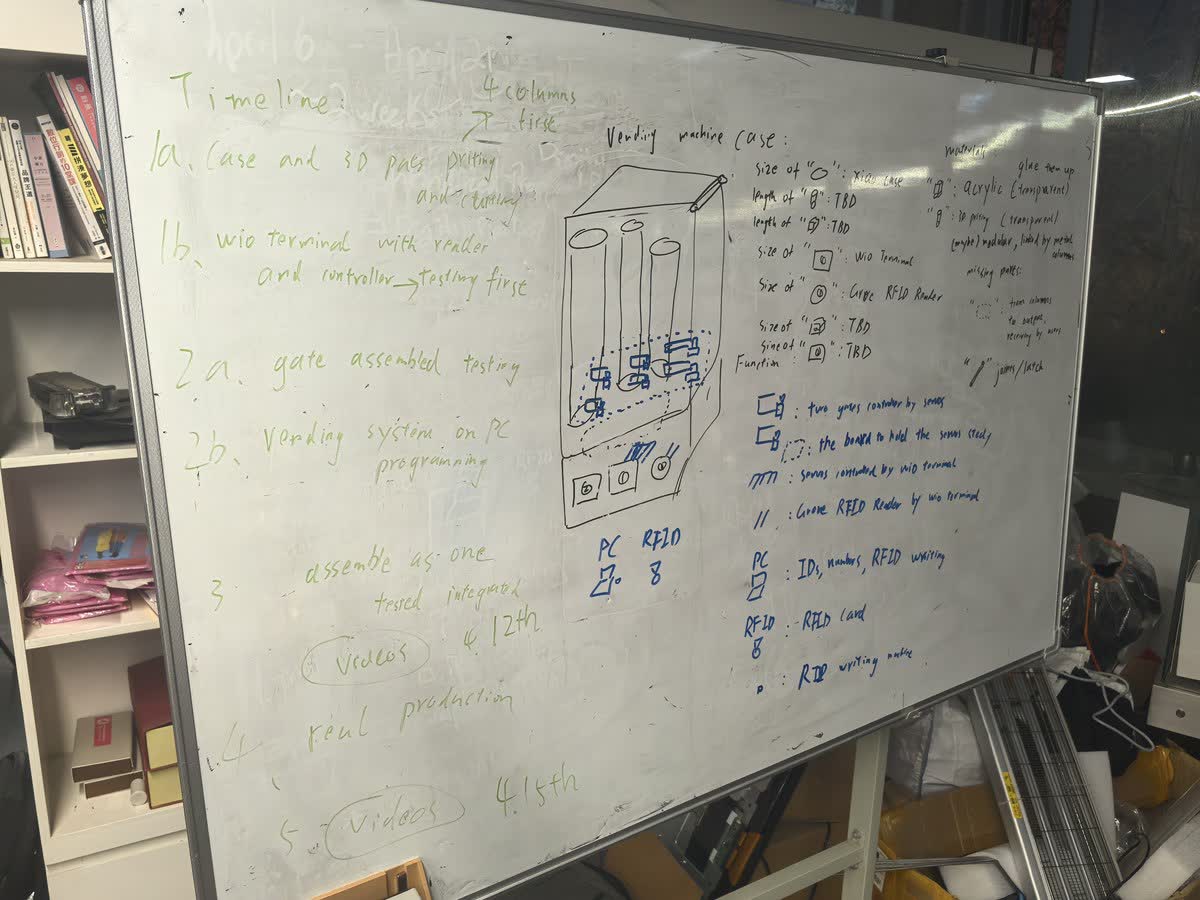
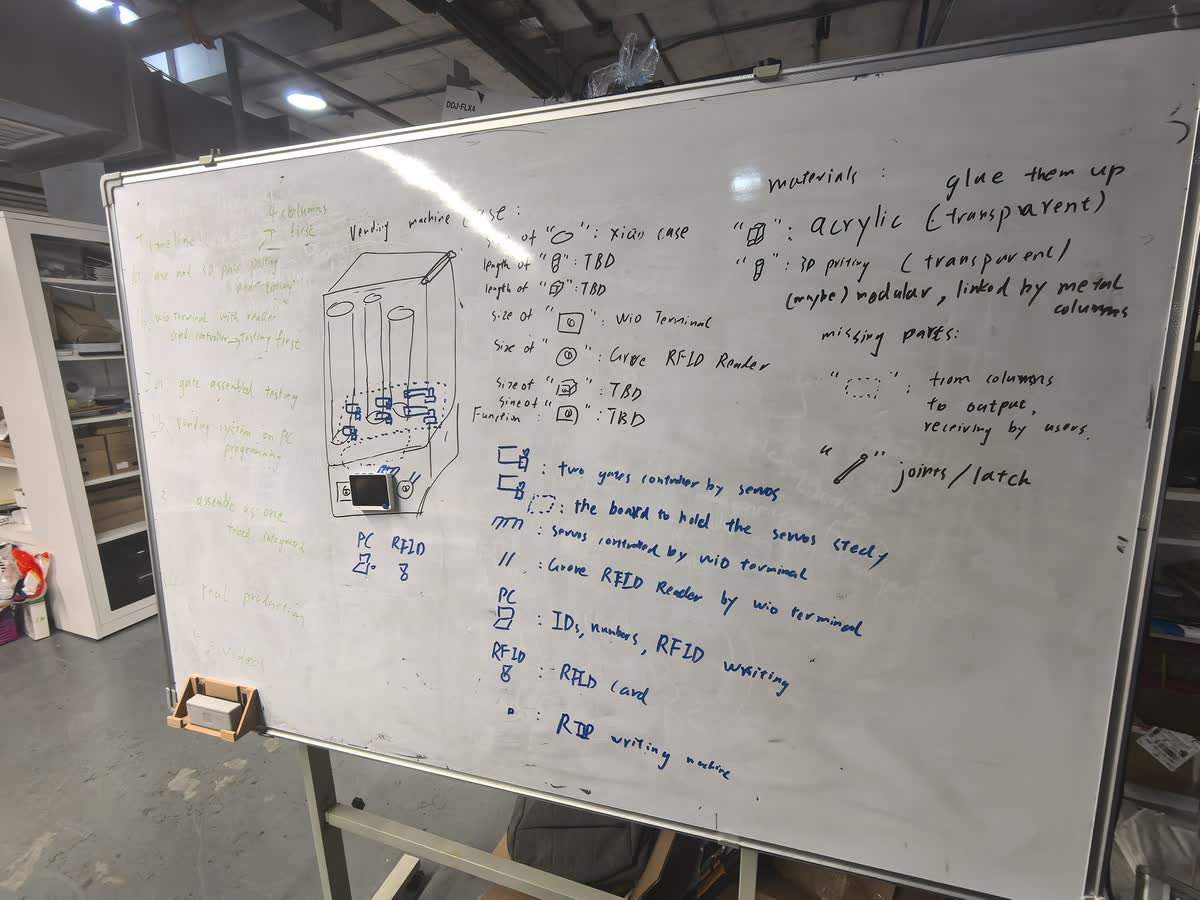
Our group chose to build a RFID-based vending machine. This machine triggers the dispensing action through RFID recognition, uses a columnar storage bin to store products, and then controls the opening and closing of the bottom door panel through a servo mechanism to achieve single-item dispensing.
Design and Implementation of RFID-based Vending Machine¶
Group Assignment Page: https://fabacademy.org/2026/labs/chaihuo/docs/week12/week12_group_assignment
1. Project Overview¶
This group project has developed a vending machine that integrates mechanical structure, actuators, automated control, practical functions, and User Interface. The device mainly relies on RFID identification to trigger automatic product dispensing, and the overall structure uses a columnar distribution system to complete product storage and dispensing.
During the development process, the team integrated the Wio Terminal with the RFID module to build an automated control system, using the STS3215 serial bus servo as the actuator to drive the bottom door panel to complete the discharging action. The entire project covered the complete process from structural design, part fabrication, mechanical assembly, manual testing to system integration.

Functionally, the goal of this machine is very clear: when the user swipes an RFID card and the system successfully recognizes it, the servo mechanism opens the discharge door, allowing a single product at the bottom of the column bin to fall. Although this process is not complicated, it contains the complete logic of machine design.
2. Overall Machine Design (Mechanism + Execution + Automation + Function + User Interface)¶
According to the job requirements, this project divides the machine into five parts for design: mechanism, execution, automation, function, and User Interface.
| Component | Implementation in this project |
|---|---|
| Mechanism Institution | Columnar storage bin, bottom door panel, product sliding channel |
| Actuation Execution | STS3215 Serial Bus Servo Drive Door Panel |
| Automation 自动化 | Wio Terminal controls servo action after reading RFID |
| Function 功能 | Identify the user and automatically distribute a single product |
| User Interface User Interface | Wio Terminal screen displays recognition and operating status |
3. Institutional Design¶
3.1 Overall Architecture¶
This vending machine uses a columnar dispensing structure as its main mechanical framework. Products are vertically stacked inside the transparent columnar storage bin and slide down naturally under gravity. The device's outer shell is made of transparent acrylic material, allowing users to directly observe the quantity of remaining products inside.
The fuselage is mainly fixed and spliced using 3D printed parts, transparent sheets, and metal columns. Inside, a bottom door panel that can be opened and closed is provided as a transfer mechanism, and the door panel cooperates with a servo arm to control the release of the bottommost product.
3.2 Discharge Mechanism¶
The products inside the column silo are stacked vertically. By default, the bottom door panel remains closed to support the bottommost product. During discharging, the servo arm pushes the door panel open, causing the bottommost product to fall under the force of gravity. Subsequently, the door panel closes to prevent the products above from continuing to fall.
The core difficulty of this structure is to control "only one product drops at a time". If the opening of the door panel is too large or the opening time is too long, multiple products may drop at once; if the stroke of the door panel is too small, it may cause the product to get stuck. Therefore, the size of the discharge port, the rotation angle of the door panel, the product diameter, and the column bin clearance all need to be adjusted in coordination.
4. Actuator Design¶
The device selects STS3215 serial bus servo as the main actuator, and is paired with a customized 3D printed servo arm to complete mechanical transmission. The servo arm has pre - drilled mounting holes, enabling it to be tightly connected to the servo output shaft and the door structure.
The rotational motion of the servo is converted into the opening and closing action of the door panel through the servo arm. Compared with ordinary DC motors, the advantage of the servo is that it can control the angle, so it is more suitable for mechanisms that require fixed opening and closing positions.

The execution process is as follows:
- The servo maintains the initial angle, and the door panel closes.
- After successful RFID identification, the main controller sends servo action commands.
- The servo rotates to the door opening angle.
- The product falls from the bottom of the column silo.
- The servo returns to the initial angle, and the door panel closes.
5. Automated Control Design¶
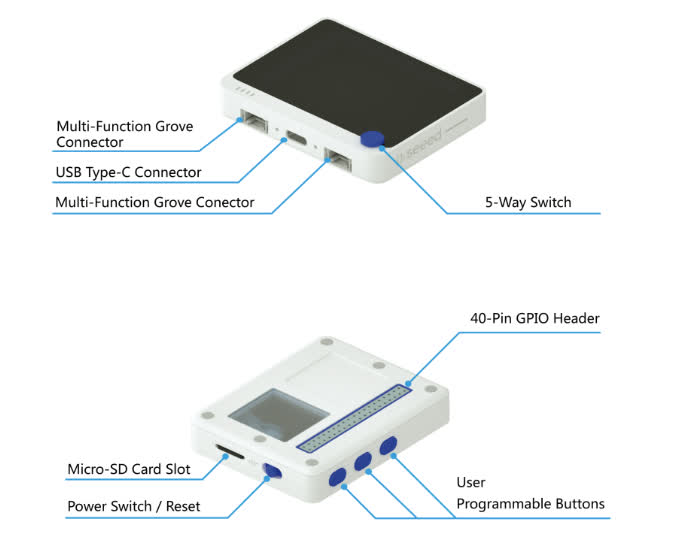
The device uses Wio Terminal as the main control unit, combined with Grove RFID reader and STS3215 servo to build the automation control logic.

The automated process is as follows:
- The device is in standby mode, and the Wio Terminal screen displays "Waiting for card swipe".
- The RFID module reads card information.
- The main controller determines whether RFID identification is successful.
- If the recognition is successful, the master sends an action command to the servo.
- The servo drives the door panel to open, releasing the product.
- After discharging is completed, the servo resets, and the machine returns to standby mode.
This process forms a basic automated closed loop: user input is generated via RFID, the main controller processes the recognition results, the actuator completes mechanical actions, and the screen provides feedback on the status.
6. Function and User Interface¶
6.1 Core Functions¶
This vending machine has the following functions:
- RFID card recognition, supporting contactless triggering.
- Columnar storage structure, capable of storing multiple products.
- Servo-controlled door panel enables single discharge.
- The transparent storage body displays the inventory status.
- The main control screen displays the operating status of the device.
These functions, when combined, endow the device with the basic logic of a vending machine: identifying the user, confirming the operation, executing product dispensing, and providing status feedback.
6.2 User Interface¶
This machine mainly uses the Wio Terminal screen as the Human-Machine Interface (HMI). The screen can display RFID recognition results, device status, and material dispensing progress in real-time, allowing users to know whether the machine has recognized the card and whether it is currently dispensing material.
The team has also planned a PC backend dashboard for subsequent inventory management and data statistics. This part will be developed by other members of the group.
7. Mechanical Part Fabrication and Manual Operation¶
According to the requirements of this week's assignment, the machine needs to first complete the fabrication of the mechanical part and be able to operate manually. Therefore, before the full integration of the electronic control system, we first conducted manual tests on the column silo and door panel structures.
Key points of manual testing include:
- Whether the product can slide smoothly in the column silo.
- Can the bottom panel stably support the product when closed?
- Can the door panel open smoothly when manually pushing the servo arm?
- Does only one product drop each time the door panel is opened?
- After the door panel is closed, can the next product return to the position awaiting discharge?
During the testing process, we found that the clearance of the mechanical structure is crucial. If the column magazine is too tight, the product will get stuck; if the discharge port is too large, the product is prone to continuous dropping. Therefore, we gradually made the discharging process more stable by adjusting the position of the door panel, the stroke of the servo arm, and the support structure.
Continue with the integration of the servo and RFID control systems only after the manual verification is completed.
8. Personal Contribution (Xin Ruili)¶
In this project, I was mainly responsible for the design of the overall machine column structure and the product transfer mechanism, while also participating in mechanical assembly and manual debugging.
I independently completed the structural design of the vertically stacked column silo. This structure is based on the principle of gravity discharge, allowing products to fall naturally within the silo and controlling release through the opening and closing door at the bottom. To prevent material jams or multiple products dropping at once, I adjusted the internal space of the silo and the size of the discharge opening according to the product dimensions.
In material selection, I use transparent materials to design the outer frame of the storage bin. This not only ensures structural strength but also allows users to visually observe the quantity of remaining products inside, enhancing the observability of the machine.
I also designed the gating transfer structure at the bottom of the column silo to enable it to cooperate with the movement of the servo arm. The door panel needs to stably support the product when closed and allow the product to fall smoothly when opened, so both the door panel stroke and the servo arm position need to be adjusted repeatedly.
After the structural design was completed, I participated in the assembly work of the column silo components, including parts alignment, splicing, and fixing. Before the electronic system was connected, I simulated the machine operation by manually pushing the servo arm, repeatedly testing the opening and closing stroke of the silo door and the discharging logic to confirm that the mechanical structure could stably complete a single discharging operation.
In addition, I also adjusted the installation position of the column magazine according to the overall machine layout to ensure that the mechanical structure is compatible with the servo, RFID module, Wio Terminal, and the housing frame, thereby ensuring the smooth progress of subsequent overall integration.
9. Group Collaboration Record¶
This project was jointly completed by twelve people, with the team's division of labor covering creative concept, structural design, hardware selection, program development, physical testing, and post-production display.
Guannan, Sunny, and Jerry are responsible for conceiving the project's creative ideas and appearance design, providing shape constraints and design directions for the column silo structure. Tim coordinates the overall structural framework and equipment operation process, and together with me, determines the installation position and functional logic of the column silo mechanism in the whole machine. Maggie completes the hardware research and selection, providing the installation dimensions and motion parameters of the servo and RFID modules for the mechanical structure.
Join Yu and Dolphin are responsible for program writing, module debugging, and back-end control panel development. Jenny and Henry Yu completed parts assembly and circuit wiring. Meia is responsible for multiple rounds of prototype function testing and providing feedback on issues in the mechanical structure. Emily is responsible for material selection and 3D parts production. Alison completed post-production shooting, editing, and organization of presentation materials, integrating the structural design results into the final project presentation content.
The entire project requires multiple modules to cooperate with each other. If the mechanical structure is unstable, the material cannot be discharged smoothly even if the program is complete; if the electronic control response is inaccurate, the mechanical actions cannot be executed as expected. Therefore, communication and iteration among team members are very important.
10. Project Summary¶
In this project, my key focus was on the design optimization of the vending machine's vertical column storage body and product transfer mechanism. Through structural modeling, component assembly, and repeated manual testing, I verified the feasibility and stability of the gravity discharge mechanism, providing core structural support for the mechanical part of the equipment.
With the teamwork, we completed the adaptation and debugging of the mechanical structure and electronic modules, and achieved the function of automatic material discharge after RFID recognition. This practice has enabled me to more comprehensively understand the development process of mechatronic equipment: the mechanical structure, actuator, control logic, and user interface must be considered simultaneously, and if any part is unstable, it will be difficult for the entire machine to operate normally.
This assignment also made me realize that mechanical design does not end with a single modeling but requires continuous correction through assembly and testing. Especially for structures involving product sliding, door panel opening and closing, and servo linkage, problems such as gaps, friction, and laggy operation can only be discovered after actual operation.
AI Assistance:
During the preparation of this documentation, ChatGPT (GPT-4) was used as a language assistance tool.
It helped with sentence polishing and translation from Chinese to English to improve readability and clarity.