Inspiration
The concept of a spherical robot is inspired by nature (rolling insects, tumbleweeds) and robotics advancements like BB-8 (Star Wars), Sphero, and GroundBot. These robots offer a compact, tamper-resistant design that ensures smooth mobility in dynamic environments. The goal is to create an autonomous surveillance robot that can navigate confined spaces, rough terrains, and hazardous areas without being easily detected or obstructed.
Overview
This spherical robot is designed for autonomous surveillance in factories, warehouses, gated communities, and high-security zones. It can patrol predefined routes, detect motion, and transmit live video feeds. Its spherical shape allows it to move smoothly across different terrains while remaining tamper-resistant.
Key Features
360° Surveillance: Equipped with a rotating camera system for panoramic monitoring.
Autonomous Navigation: Uses SLAM (Simultaneous Localization and Mapping) to move without external guidance.
Obstacle Avoidance: Sensors like LiDAR and ultrasonic ensure smooth movement without collisions.
Live Monitoring & Alerts: Streams real-time video and sends intrusion alerts to security personnel.
Weather & Impact Resistance: Designed to withstand harsh conditions and physical shocks.
Stealth & Energy Efficiency: Operates quietly with low power consumption, featuring wireless charging.
Users & ApplicationsFactories & Warehouses: Monitors assets and detects unauthorized access.
Gated Communities & Smart Homes: Provides autonomous home security patrolling.
Military & Defense: Performs reconnaissance in restricted areas or high-risk zones.
Public Spaces (Airports, Malls, Museums): Enhances security by detecting suspicious activities.

Project idea and objective (BB-8 inspired spherical robot)
System segmentation (base module for movement, upper module for future extension)
Design trade-offs (2-motor setup for space vs 3-motor setup for stability)
Spherical shell design (stacked, crescent, or interlocking method)
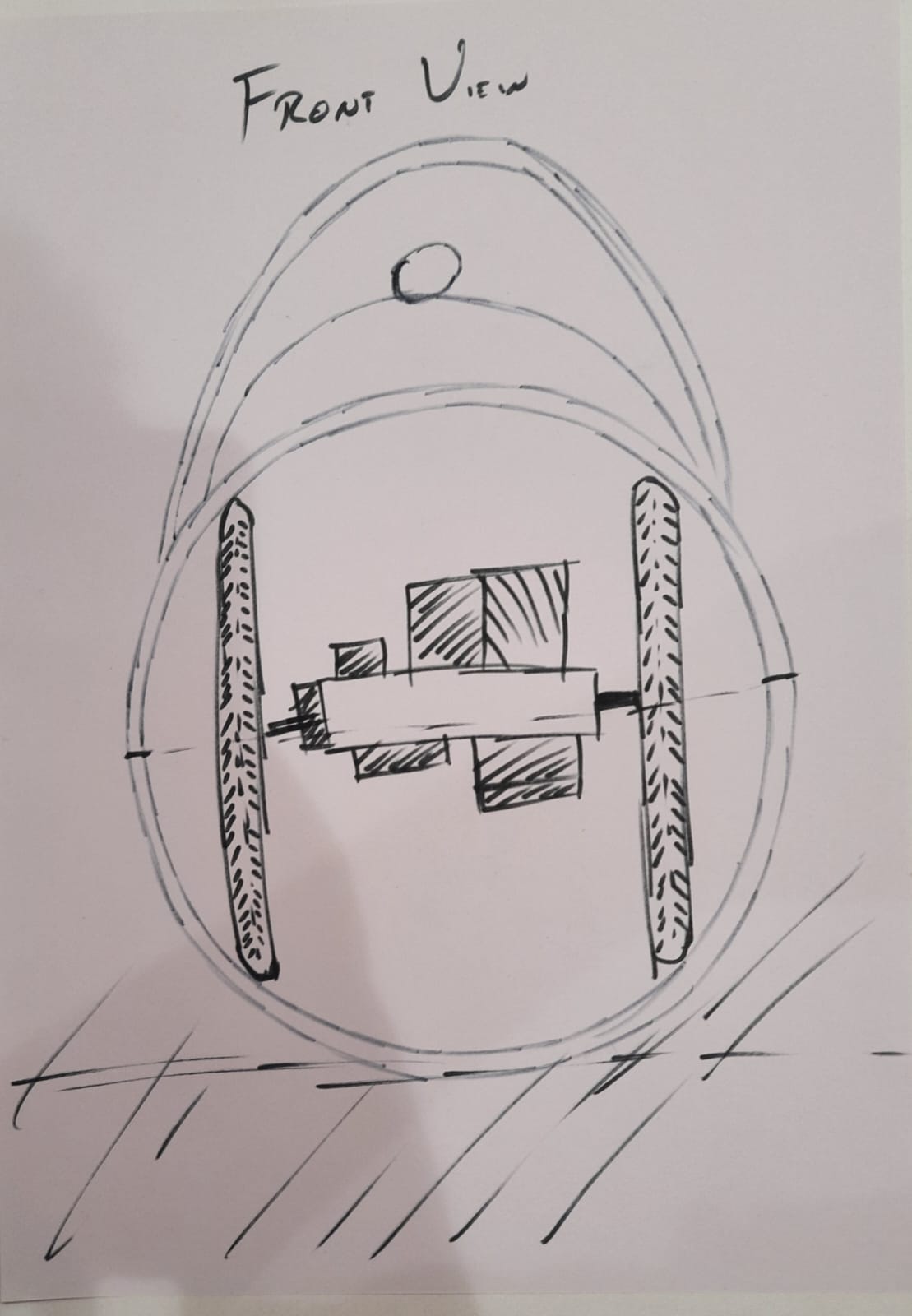
Base module internal layout and structural design
Fabrication techniques used (laser cutting, 3D printing, etc.)
Mechanical assembly and integration
Component selection (N20 motors, Xiao C3, 18650 batteries)
Power management (battery configuration and distribution)
Wiring, connections, and compact layout considerations
Joystick interface for remote control
Wireless communication setup using Xiao C3
Motor drivers and wiring implementation
Motion control logic for the motors
Microcontroller code for base movement
Code for joystick controller
Wireless data transmission and command interpretation
Wi-Fi-based control using two Xiao C3 modules
Real-time control response and reliability
Comparison between 2-motor and 3-motor configurations
Stability, balance, and space utilization tests
Movement behavior and shell dynamics
Sperical Bot © 2025 by Sabareesh is licensed under Creative Commons Attribution 4.0 International
![]()
![]()

