Many makers and hobbyists have built joystick-controlled robots before, using platforms like Arduino, Raspberry Pi Pico, or ESP32, with motor drivers like L298N or TB6612FNG. On YouTube, you’ll find a variety of projects showing wireless robot control using Bluetooth, Wi-Fi, or ESP-NOW, often paired with basic joysticks or smartphone apps. Creators like ElectroBOOM, GreatScott!, and Electronoobs have popularized tutorials around custom PCB design, wireless control, and motor driving logic. Open-source sites like Thingiverse, Hackaday, and Instructables have also featured bots with 3D-printed frames and unique drive systems.
Credits : MODERNIOS TECHNOLOGIJOS Channel from You Tube
A round-shape 'robot-cop' has joined the Chinese police department. The all-terrain robot is helping the local police patrol the streets more efficiently. Find out more in this report.
Credits : James Bruton channel from YouTube
James Bruton, known for his YouTube channel XRobots, built the BB‑8 Droid v1, a fan-made version of the iconic Star Wars robot. Using 3D-printed parts, magnetic stabilization, and custom electronics, he recreated BB‑8’s rolling motion based on limited movie footage. His build evolved over time, improving surface stability and internal balance systems. Like my Special Spherical Bot, his work combines custom mechanics, PCBs, and real-time control. Bruton’s iterative, open-source approach serves as both technical inspiration and proof that unique motion systems—like mine with custom wheels—can create standout bots with a purpose. His project strongly aligns with my development journey.
Credits : James Bruton channel from YouTube
James Bruton’s BB‑8 Droid V2 is a refined version of his earlier Star Wars-inspired robot. It features a hubless internal drive system with a single-axis wheel and flywheel, enabling smooth and responsive motion inside a 3D-printed sphere. To stabilize the droid’s iconic head, he used an IMU (BNO055) paired with PID control logic. This version significantly improved maneuverability and balance over V1. Bruton shared all files and schematics openly, encouraging community replication and iteration. His V2 build exemplifies the power of combining smart mechanics with custom electronics—closely aligning with the approach used in my Special Spherical Bot.
Credits : James Bruton channel from YouTube
James Bruton’s BB‑8 Droid V3 is his most refined version of the spherical robot, focusing on stability, precision, and modularity. It uses a hubless internal drive system with a single-axis wheel and flywheel, allowing smooth rotation and tank-style turning. The flywheel is mounted on a Lazy Susan bearing to minimize friction and enhance torque control. Improved balancing is achieved using multiple IMUs and PID feedback loops for accurate orientation correction. Bruton also released full CAD, code, and circuit details. BB‑8 V3 showcases expert-level integration of mechanical and electronic systems, setting a strong benchmark for spherical robot development.
Credits : Brick Technology’s channel from YouTube
Brick Technology’s LEGO spherical robots are creative, remote-controlled robotic balls built using LEGO Technic and Power Functions components. These robots are designed to roll smoothly in all directions by housing motors and mechanisms entirely within a spherical shell. Controlled via Bluetooth using hubs like the SBrick, they achieve responsive movement through clever internal drive mechanisms. Each version experiments with different stabilization methods and motor placements to optimize balance and control. These playful yet functional builds showcase how accessible components can be used to replicate advanced robotic concepts like those seen in BB-8-style droids or custom spherical bots.
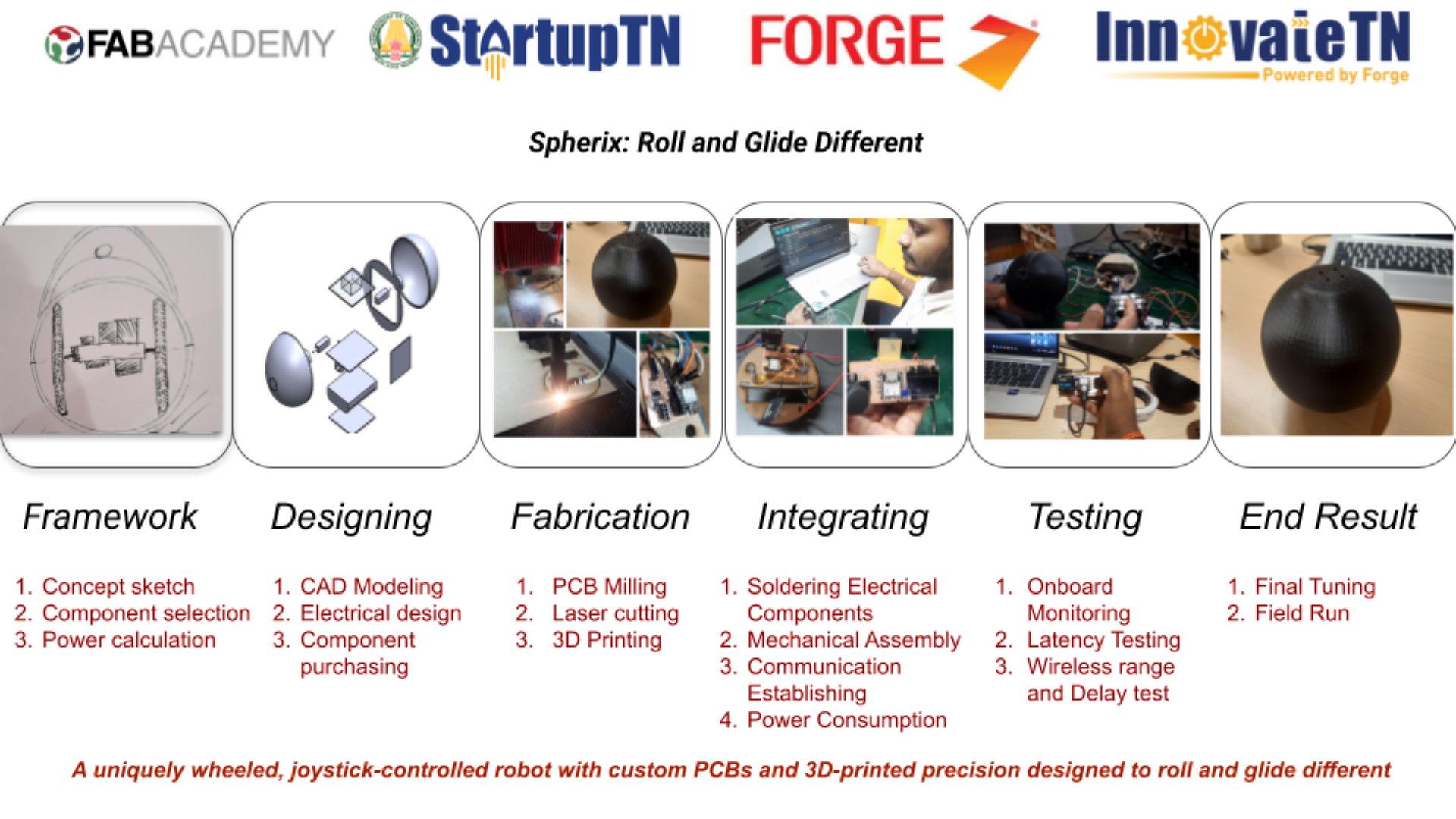
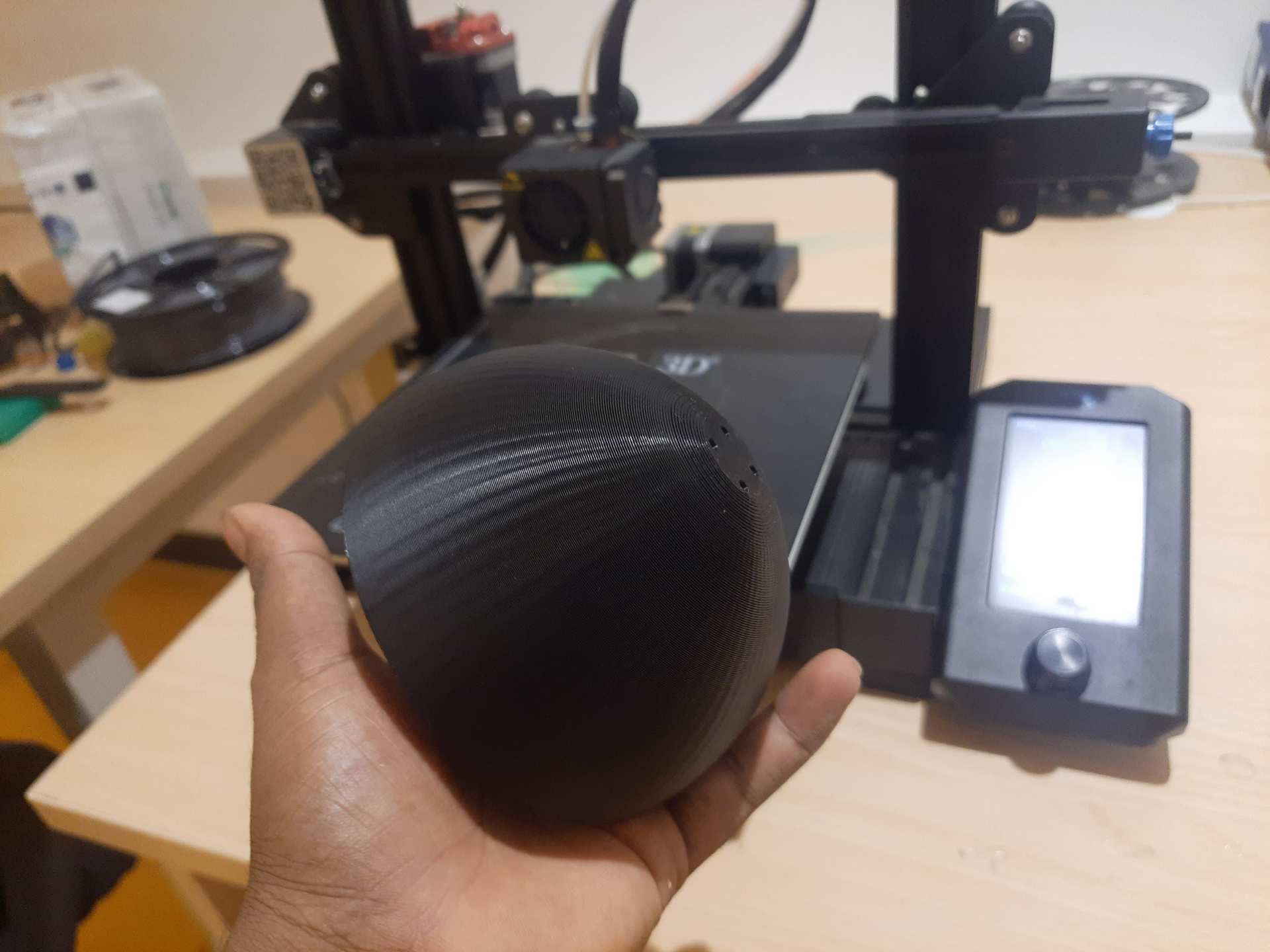
Here, I focused primarily on the movement of the bot, as it's the core functional part. On top of this base, additional features can be built later. I designed the spherical shell with internal compartments housing the receiver and transmission system, which work together to drive and control the bot's movement effectively.
Here is the Bill of Materials (BOM) for detailed reference, listing all components and materials used in the project:
Electronic Components:
3D Printed Parts:
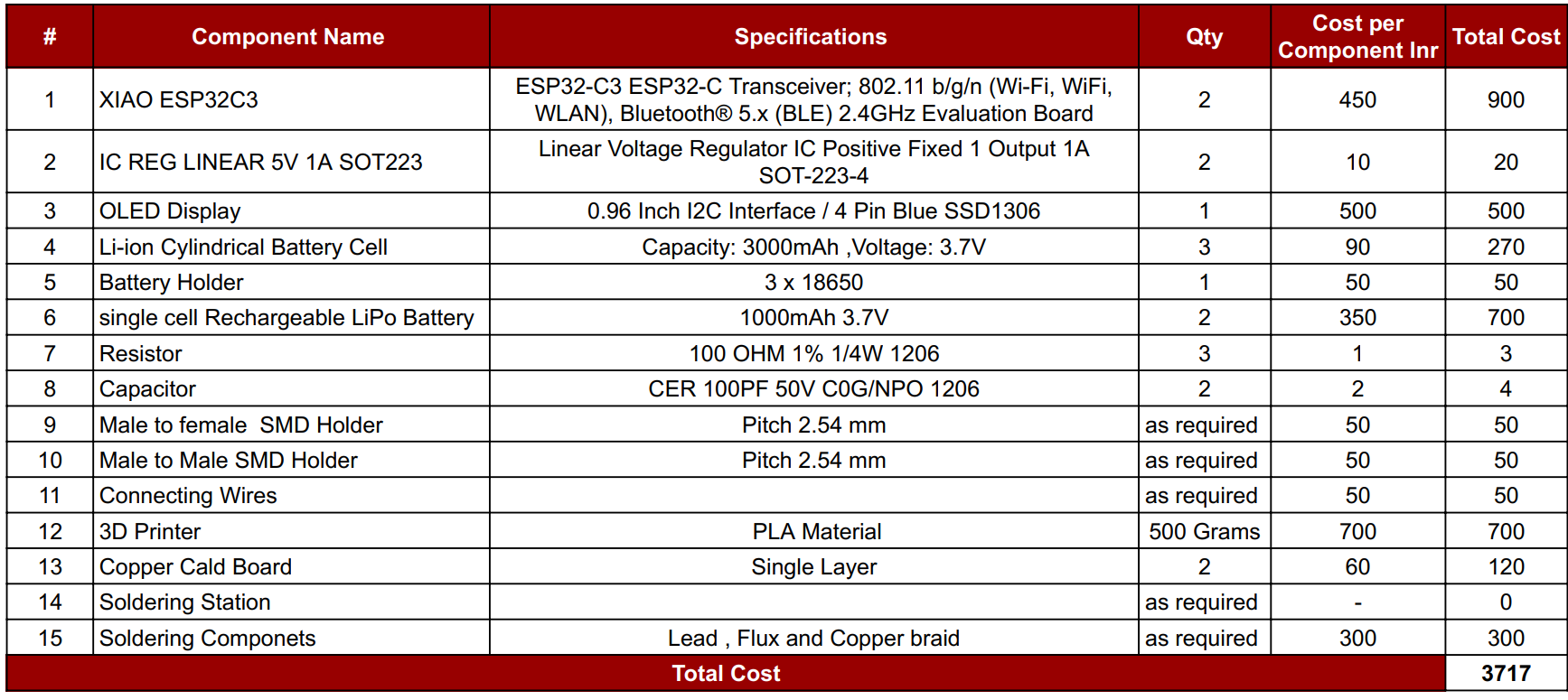
Note: The cost in India is approximately 3700, which is around $50
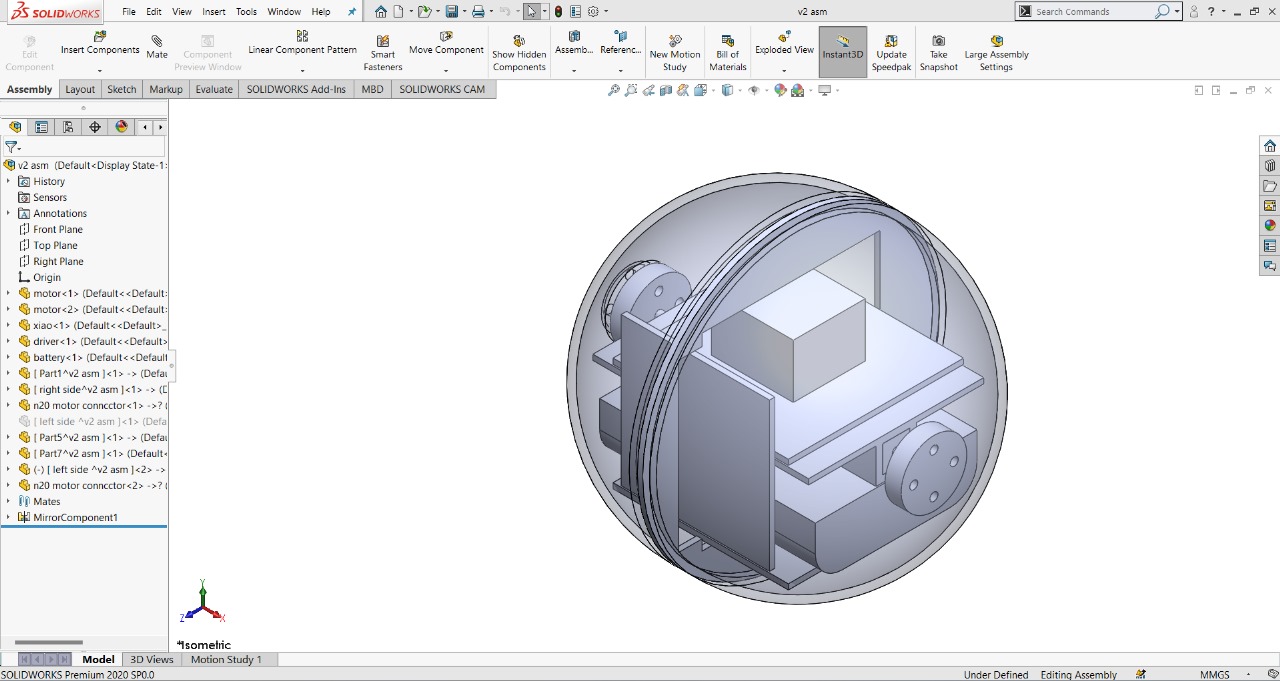
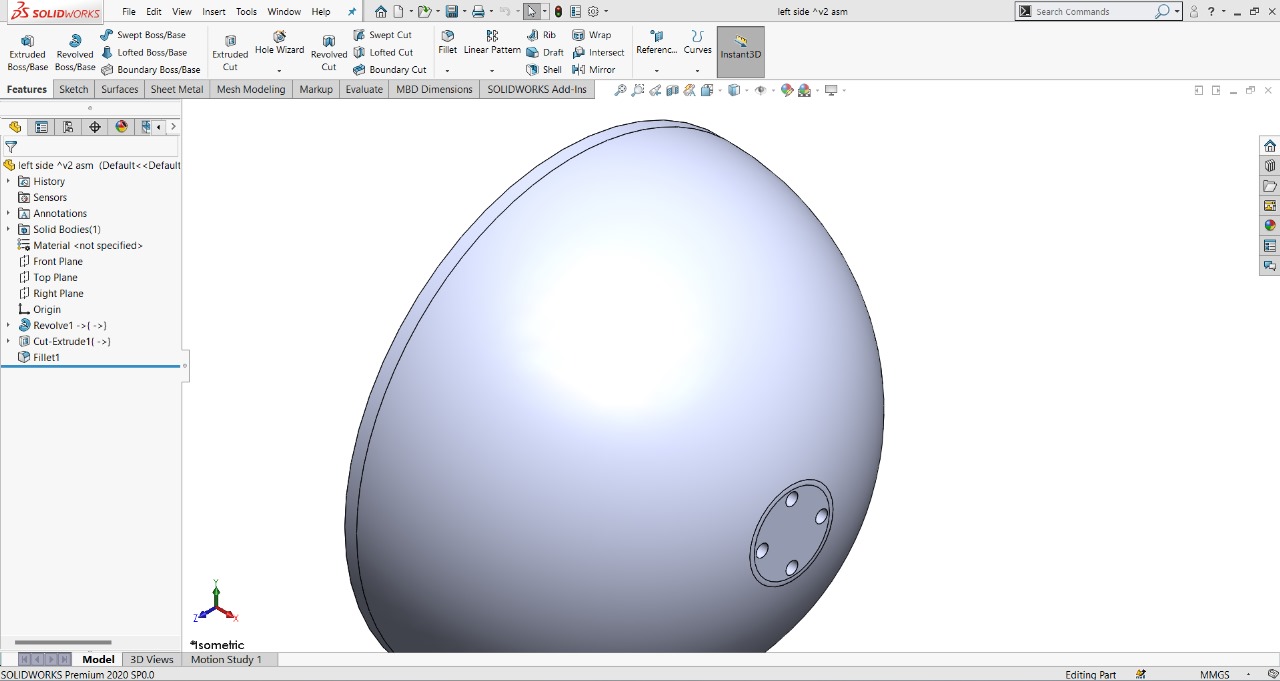
I designed a spherical bot in SolidWorks, integrating N20 motors and a battery holder within a compact, balanced structure. The model includes motor mounts, internal supports, and precise dimensions for proper assembly. All components were virtually tested for fit and function, and the complete design files are included in the original folder.
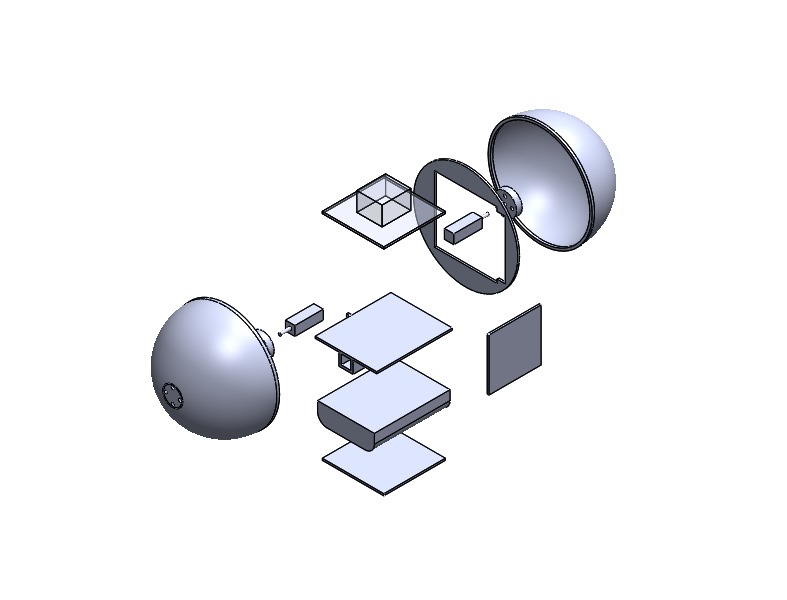
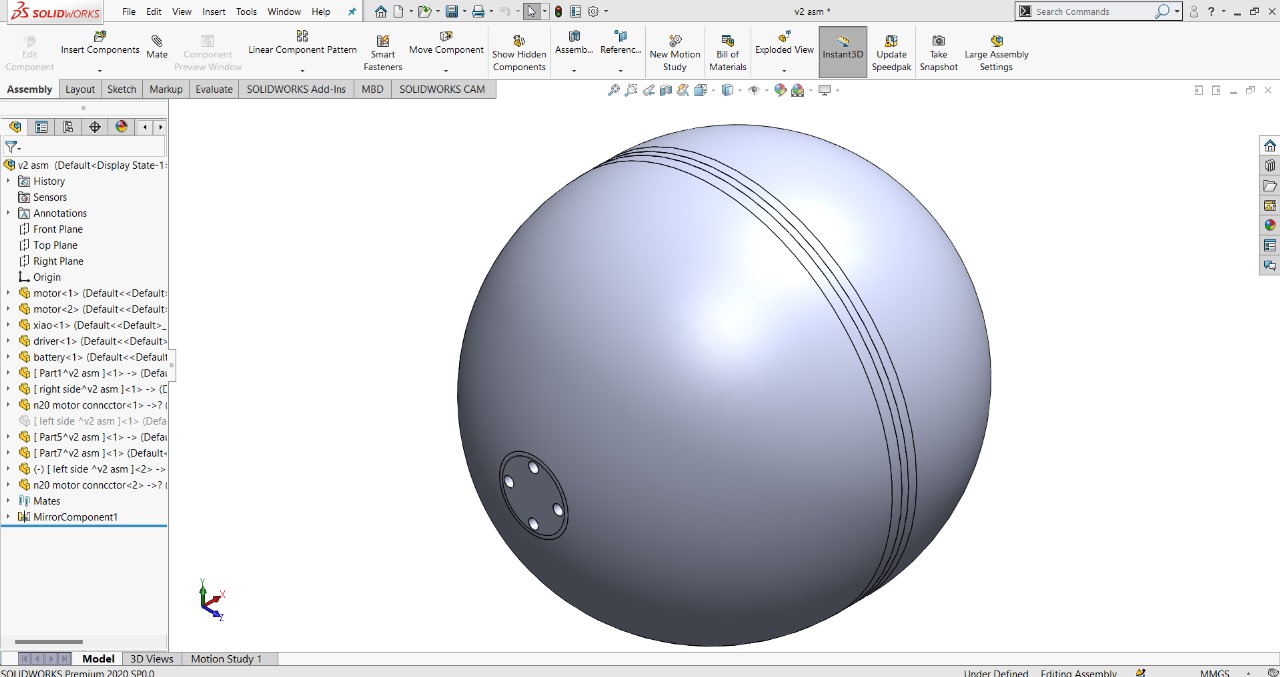
Here is the exploded view of the spherical bot, showcasing all individual components and their assembly order. It clearly illustrates how the N20 motors, battery holder, internal supports, and outer shell fit together. This view helps in understanding the design structure and simplifies the assembly process during physical construction.

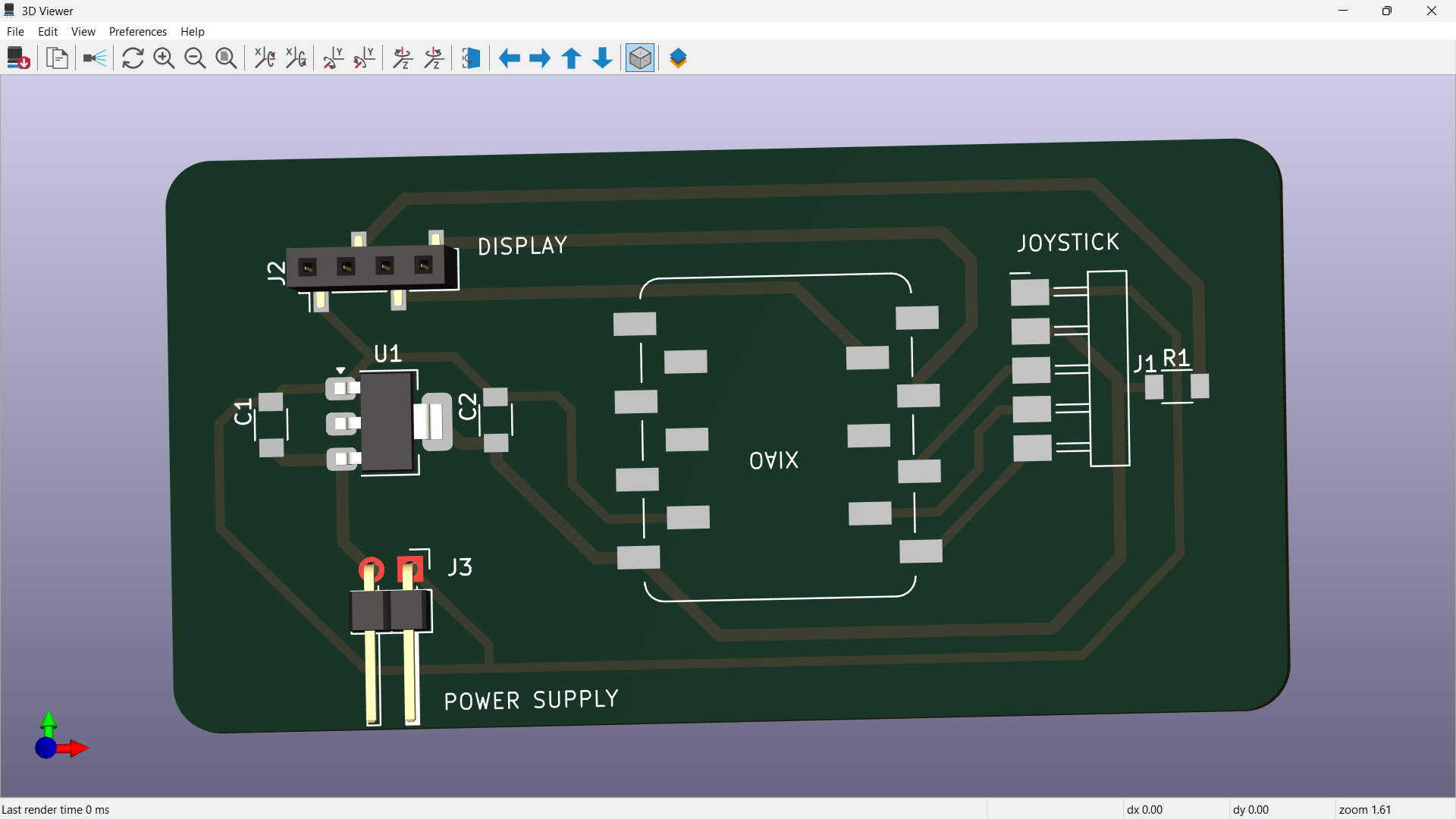
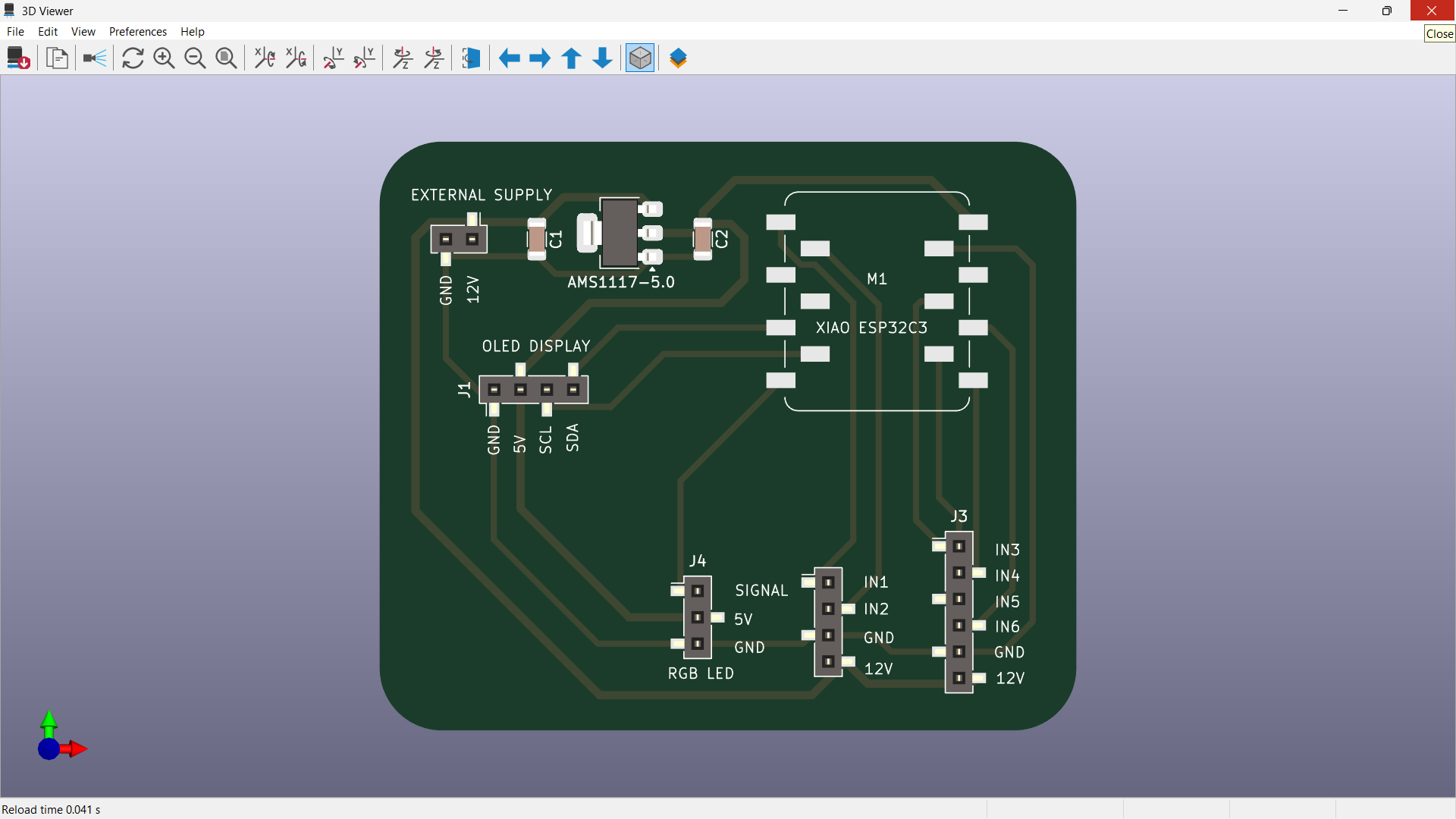
The electronics design and production were completed during the Electronics Design Week and Electronics Production Week. In the design phase, I created custom schematics and PCB layouts using EDA software. During the production week, I milled, soldered, and tested the board to ensure functionality. All design and fabrication files are included.
Link for Electronic Design week
Link for Electronic Production week
As part of my Fab Academy final project, I have chosen to freely share my work with the global maker and academic community. To do this, I am applying an open license that supports collaboration, learning, and reuse.
I have chosen to license my project under the Creative Commons Attribution (CC BY 4.0) license. This is one of the most open licenses available under the Creative Commons framework.
What This License Allows
Application of IP in My Project
My friend and colleague also supported me throughout the final project. They helped with key tasks such as assembling components, testing functionality, troubleshooting issues, and providing valuable feedback during the design and development stages. Their collaboration contributed significantly to completing the project successfully and on time.
Sperical Bot © 2025 by Sabareesh is licensed under Creative Commons Attribution 4.0 International
![]()
![]()
