Final Project¶
FOR MY FINAL PROJECT I WANT TO MAKE A MESSENGER ROBOT
to take the temperature at several places of an agricultural plantation
- air
- ground
Projet Presentation¶
## List of componants
| COMPONANT | DESCRIPTION | QUANTITY | PRICES | LINKS |
|---|---|---|---|---|
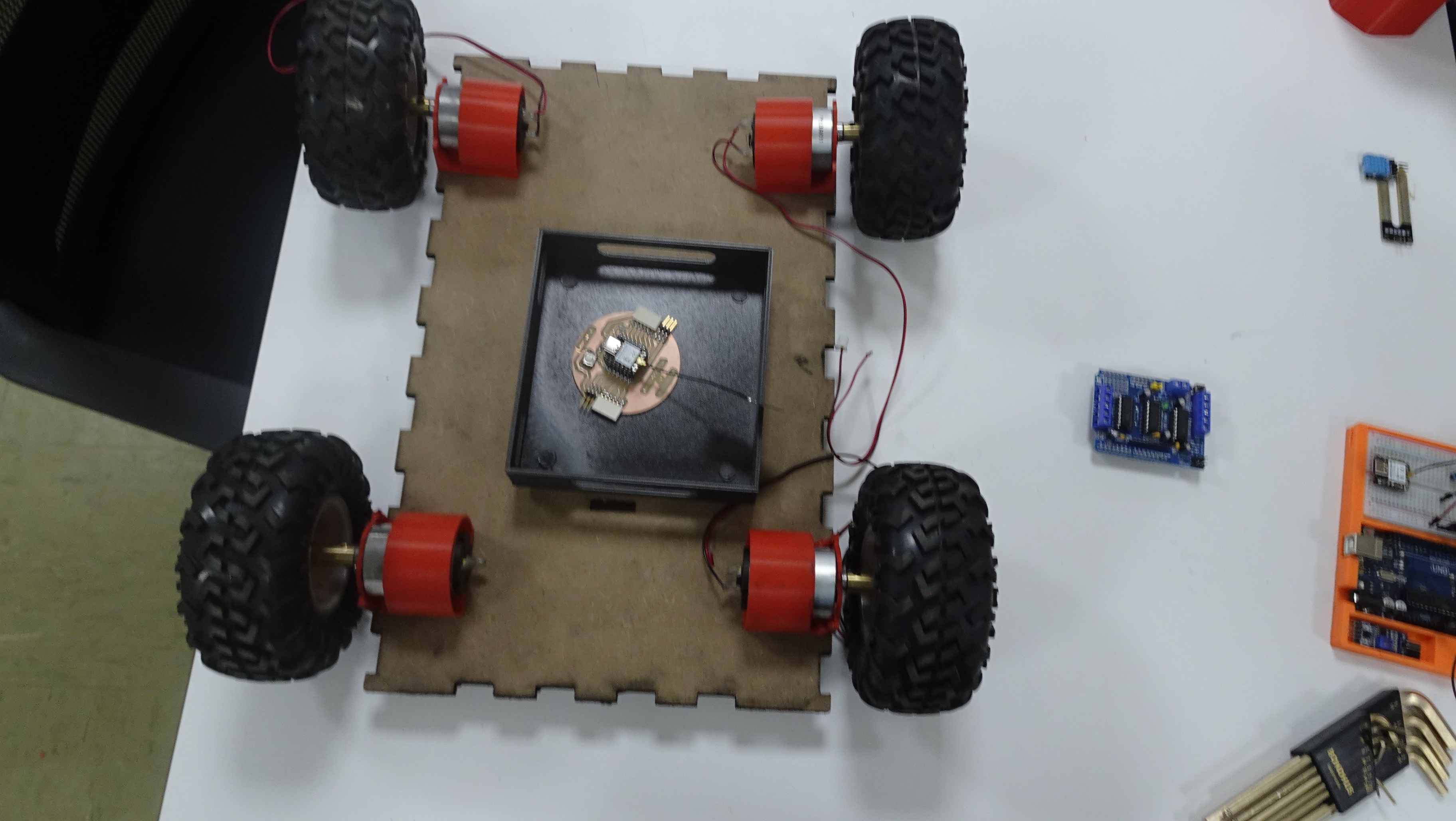
| DC MOTOR | DC 12 VOLT, reduction gear motor, 5 rpm | 4 | 4x 14,50 $US | link |
| MOTOR DC DFRIVER | L293D | 2 | 2x 2,88 $US | LINK |
| temperature sensor | DHT 11 | 1 | 1x 0,84 $US | link |
| probe, | Hygrometer Soil Moisture Modules | 1 | 1x 7,49€ | link |
| ESP 32 cam | camera | 1 | 1x4.15 $US | Link |
| Xiao esp C3 | microcontroller | 1 | 8 $US | Link |
| Dupont line | 120pcs 10cm 40Pin | 1 | 0.43 $US | Link |
| Original serial download cable | cable | 1 | 1x1.48 $US | Link |
| PLA | D = 1.75mm | 1 | 30 $US | Link |
| MDF | E= 6mm l= 400 l = 300 | 1 | 30 $US | Link |
| ultrason sensor | 4.5M | 1 | 0.65 $US | Link |
A. plan of my final projet realization¶
1 MECHANIC PART¶
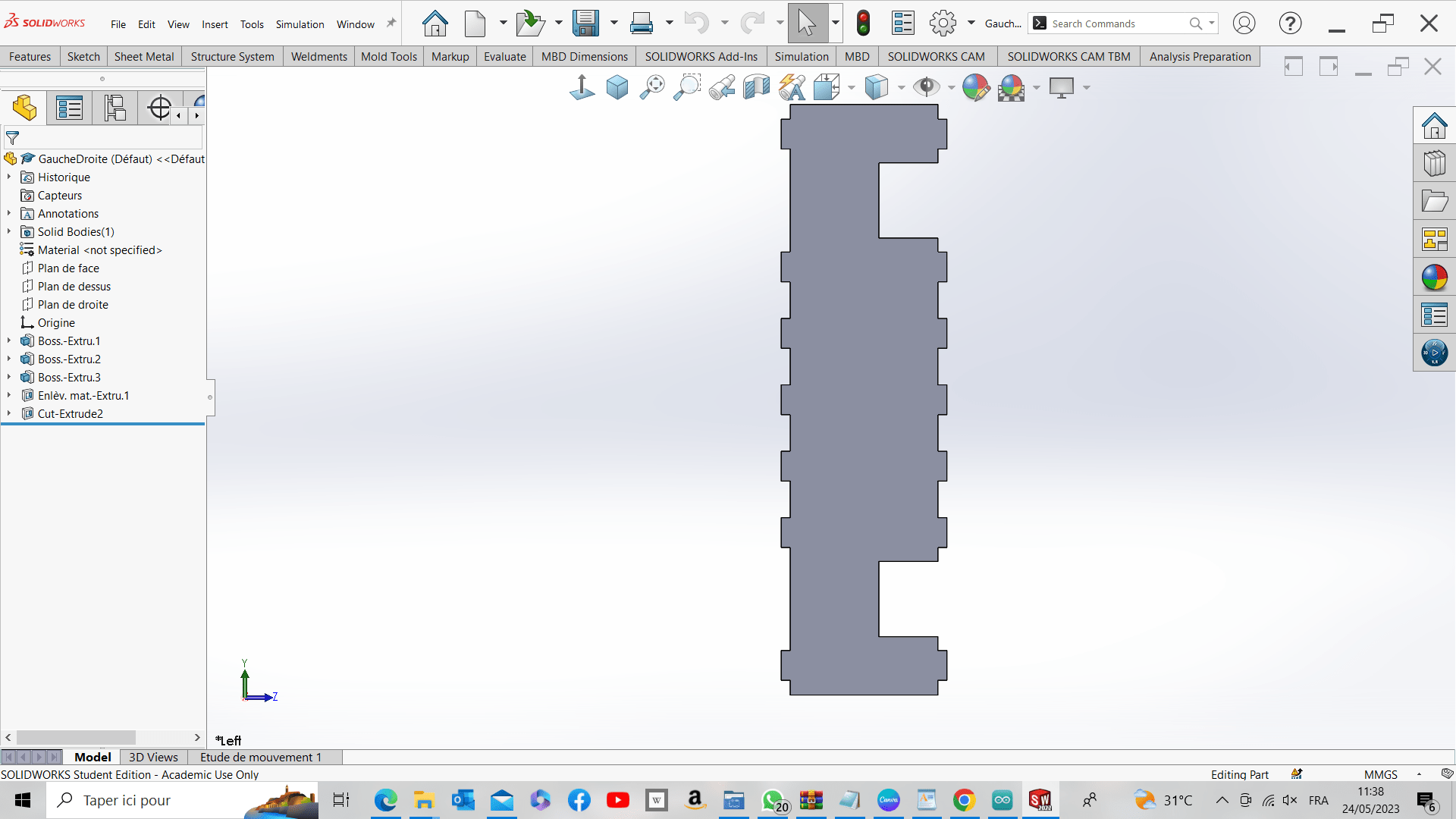
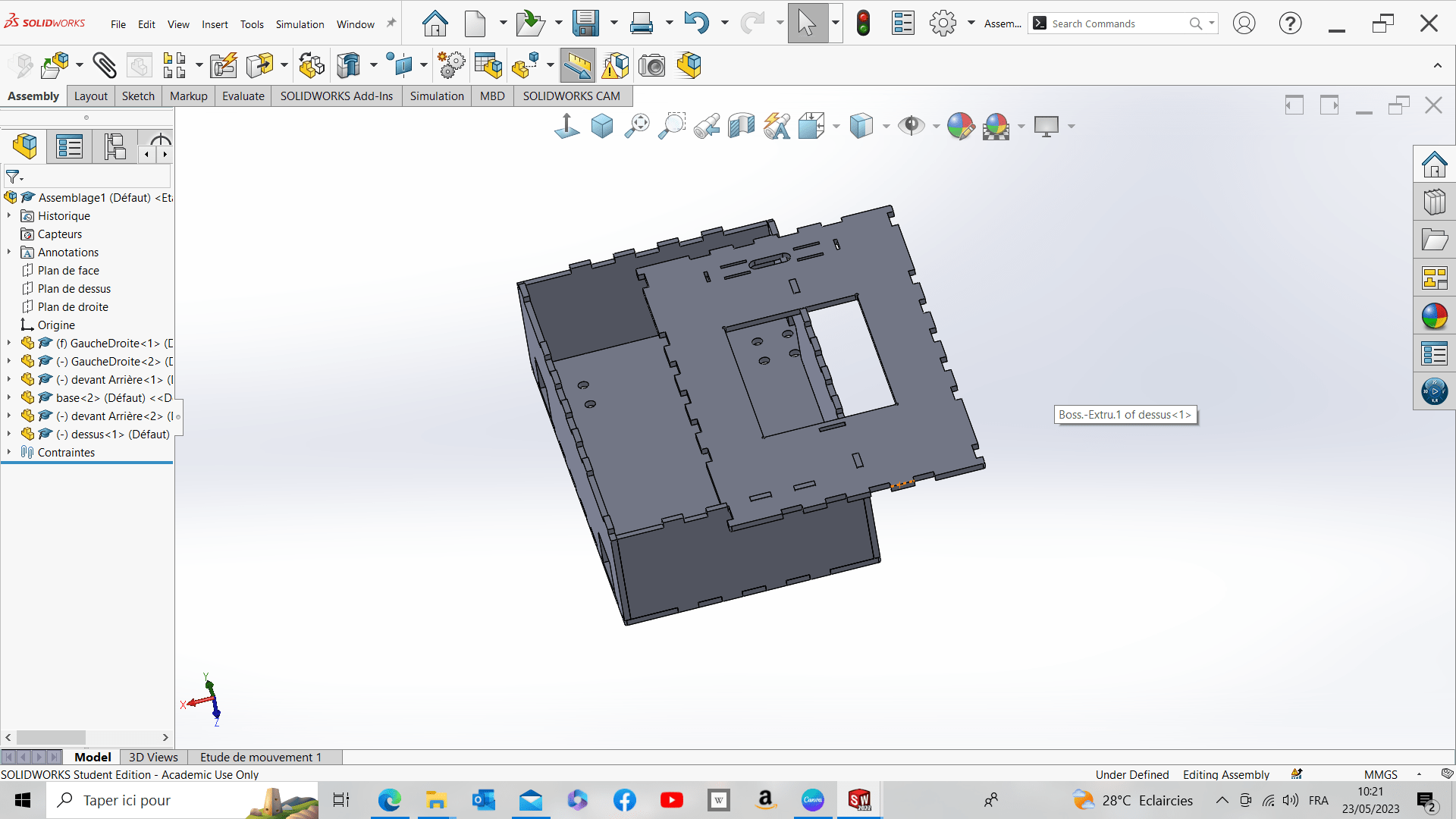
1 .design
I will use SolidWorks and fusion 360 to design my parts
2 .Fabrication
### 2 ELECTRONIC PART
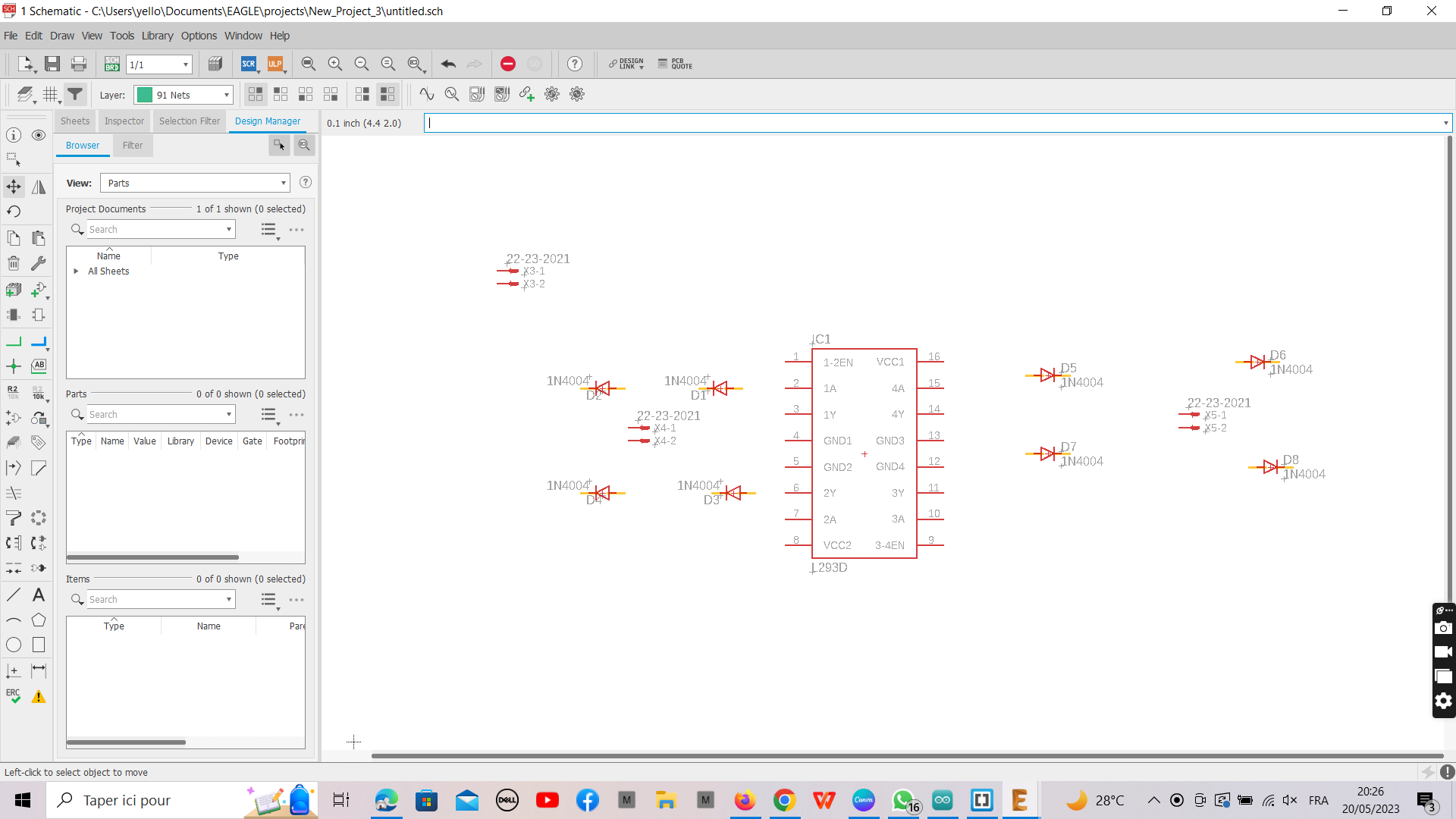
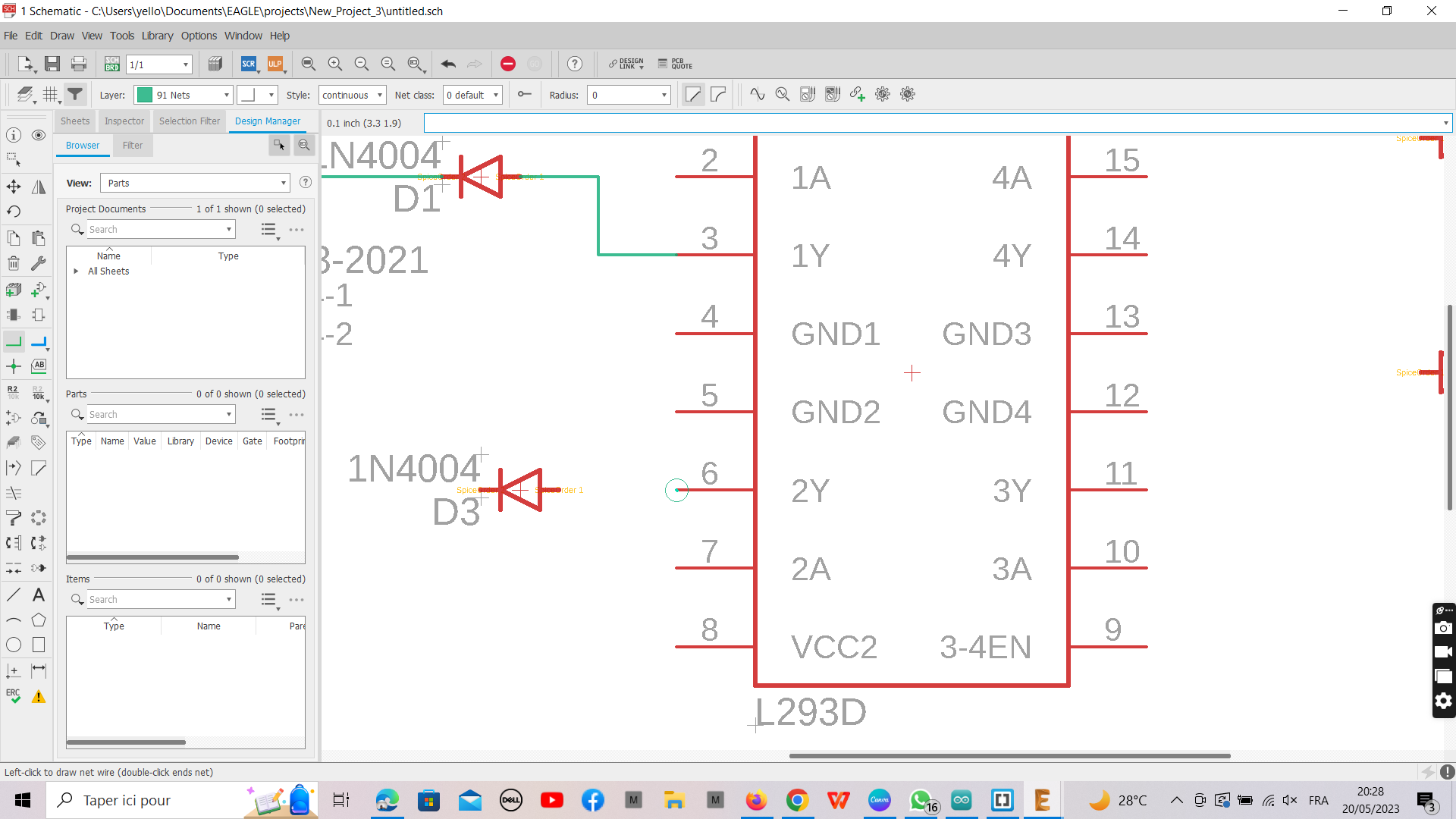
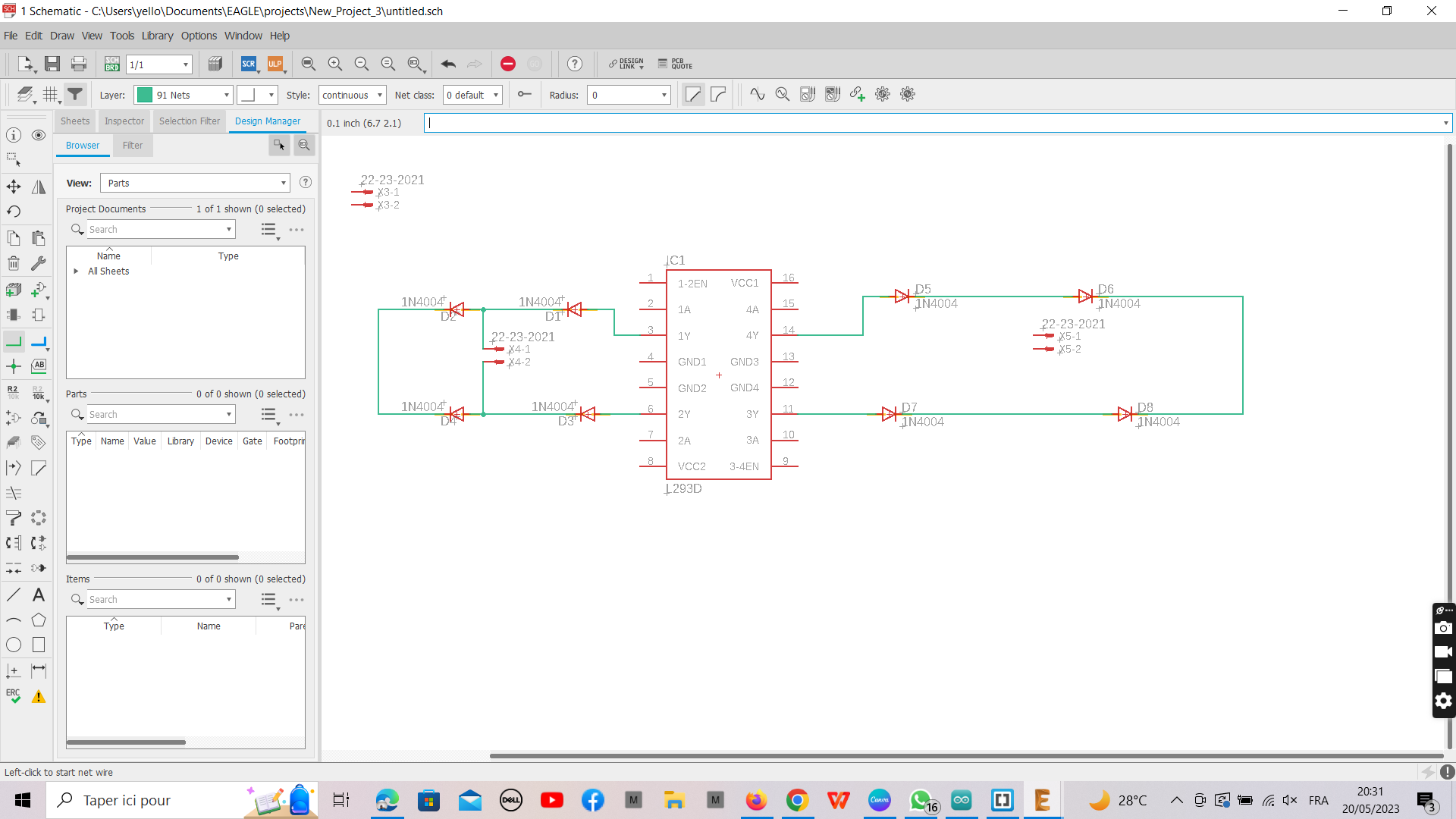
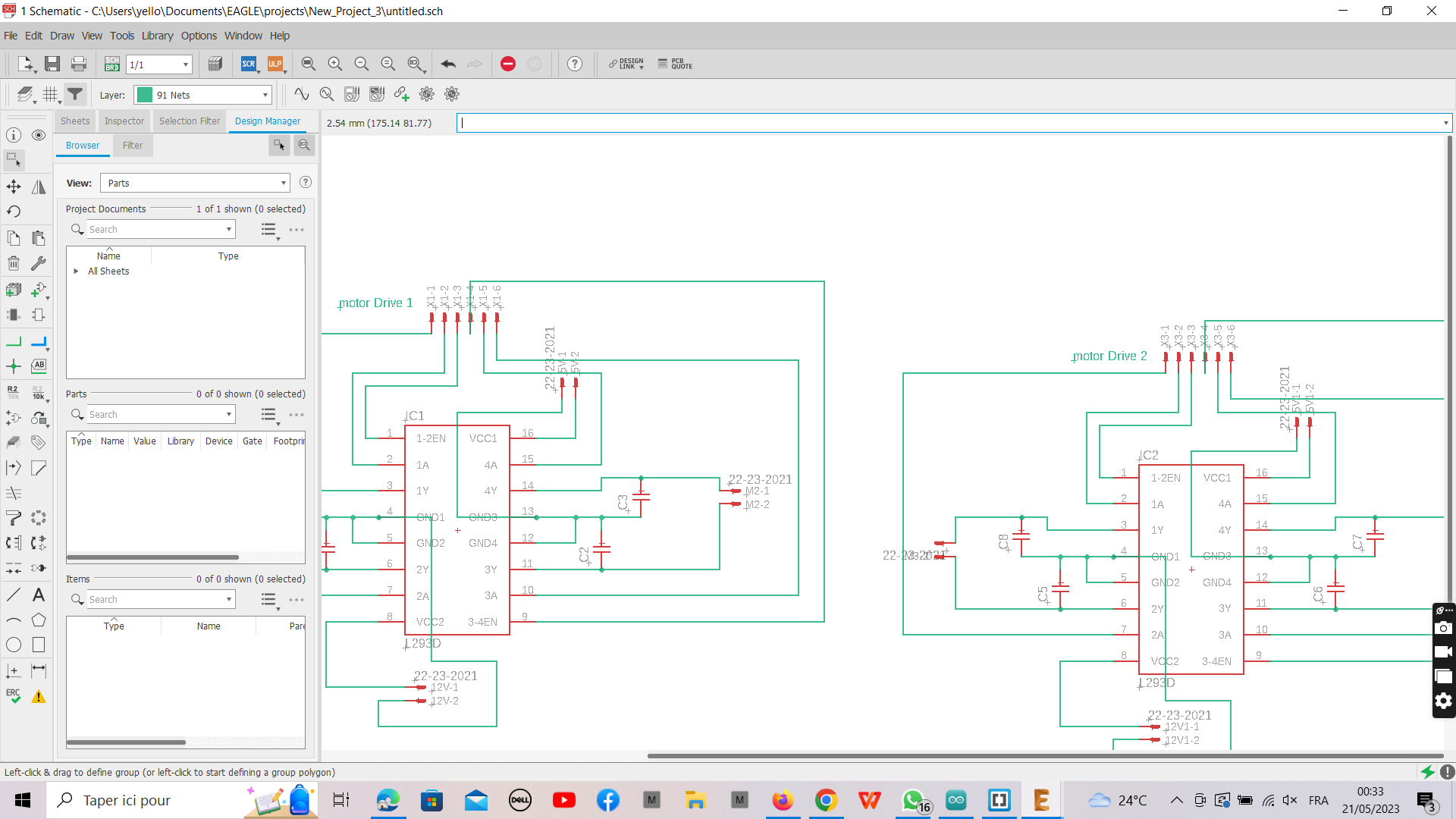
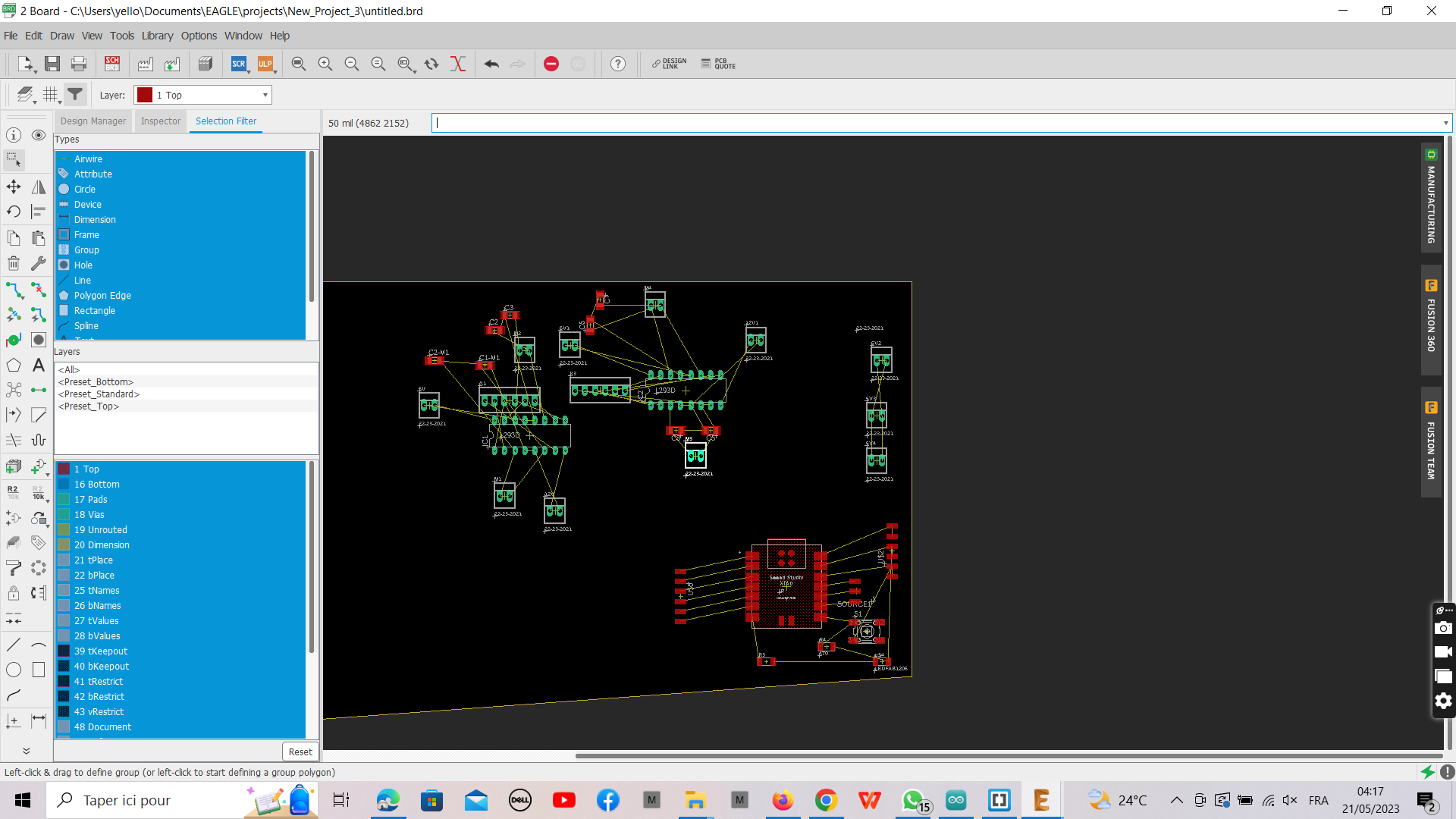
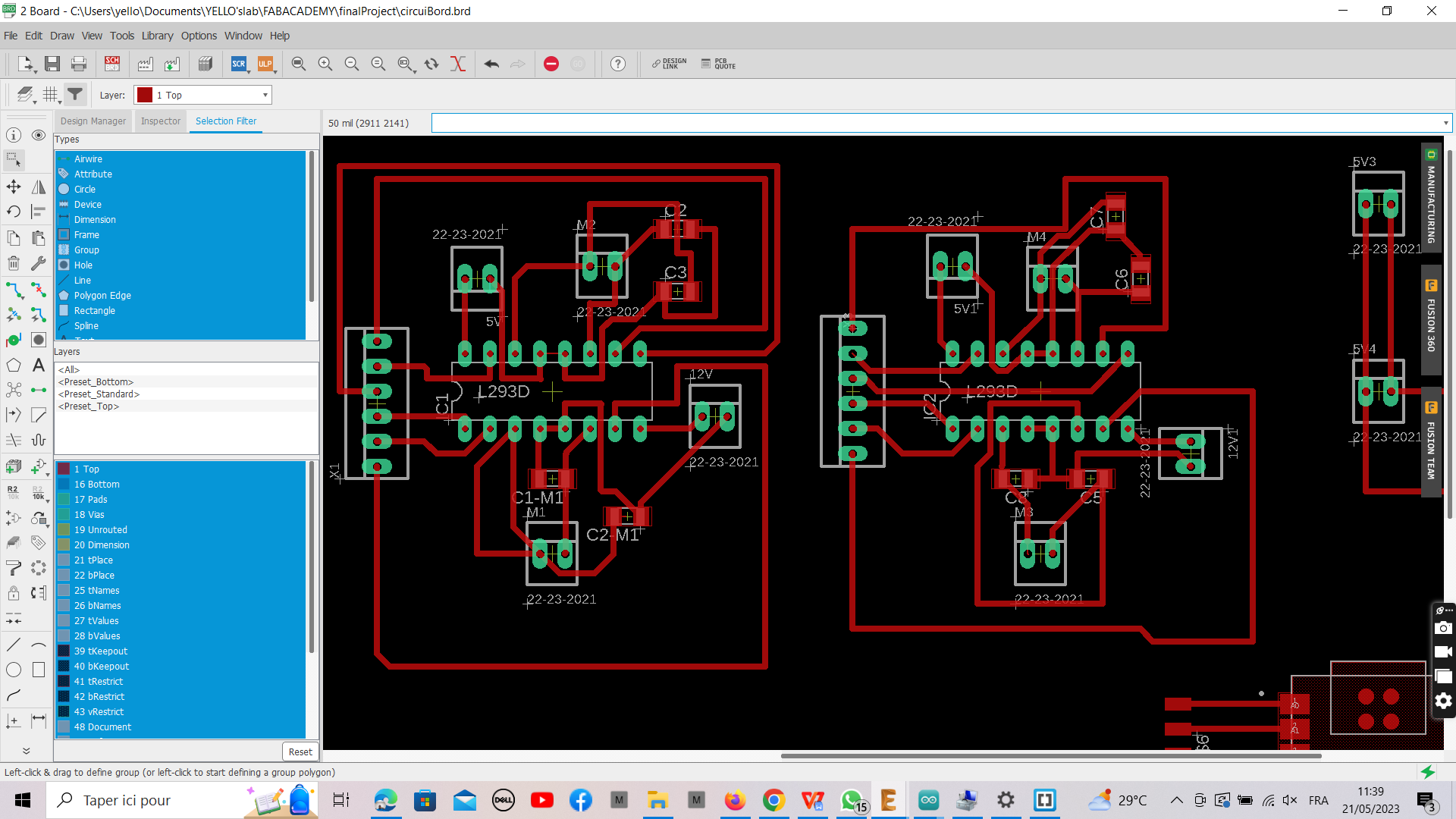
Design Boards¶
For the electronic design of my robot I will use EAGLE

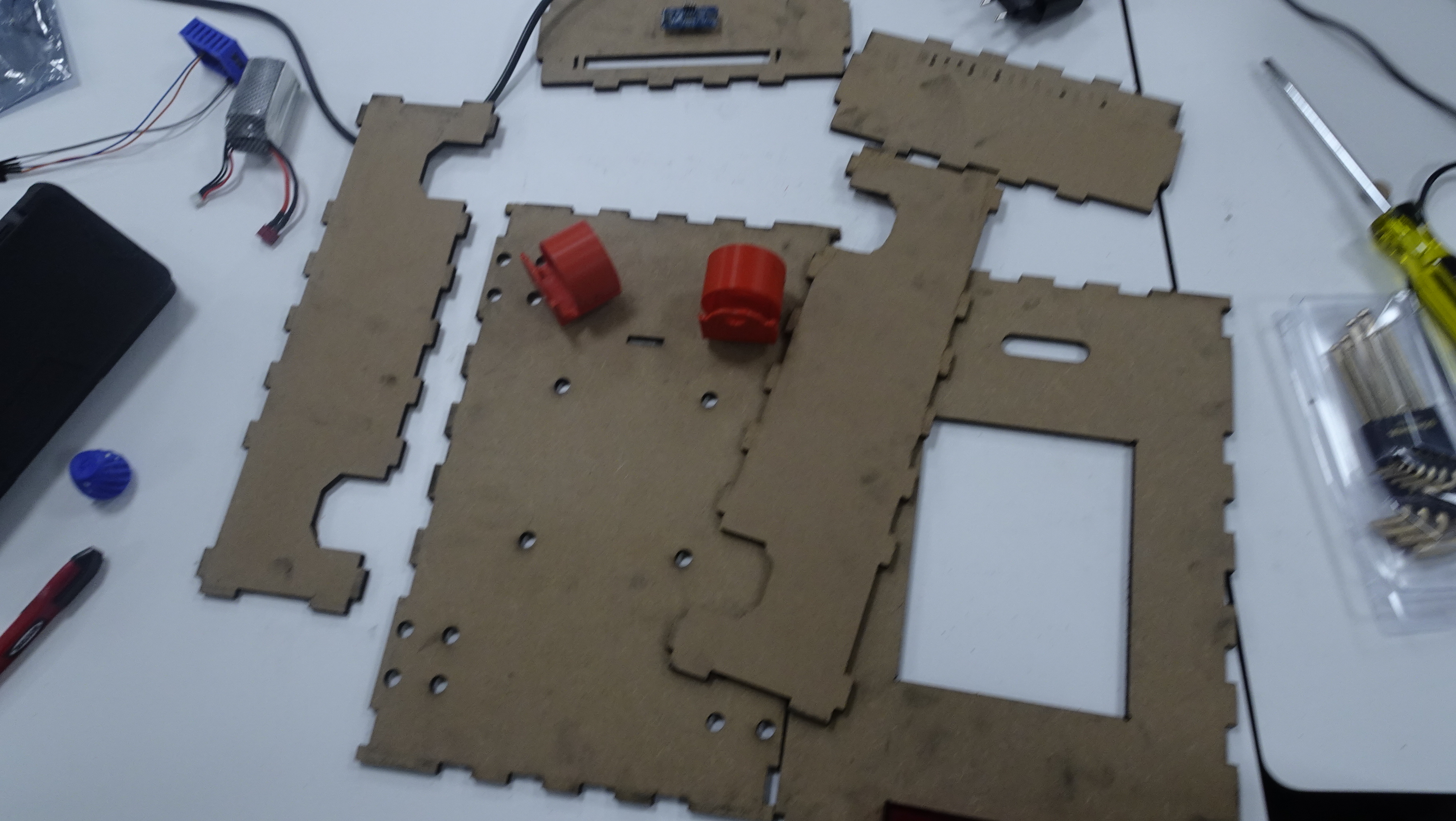
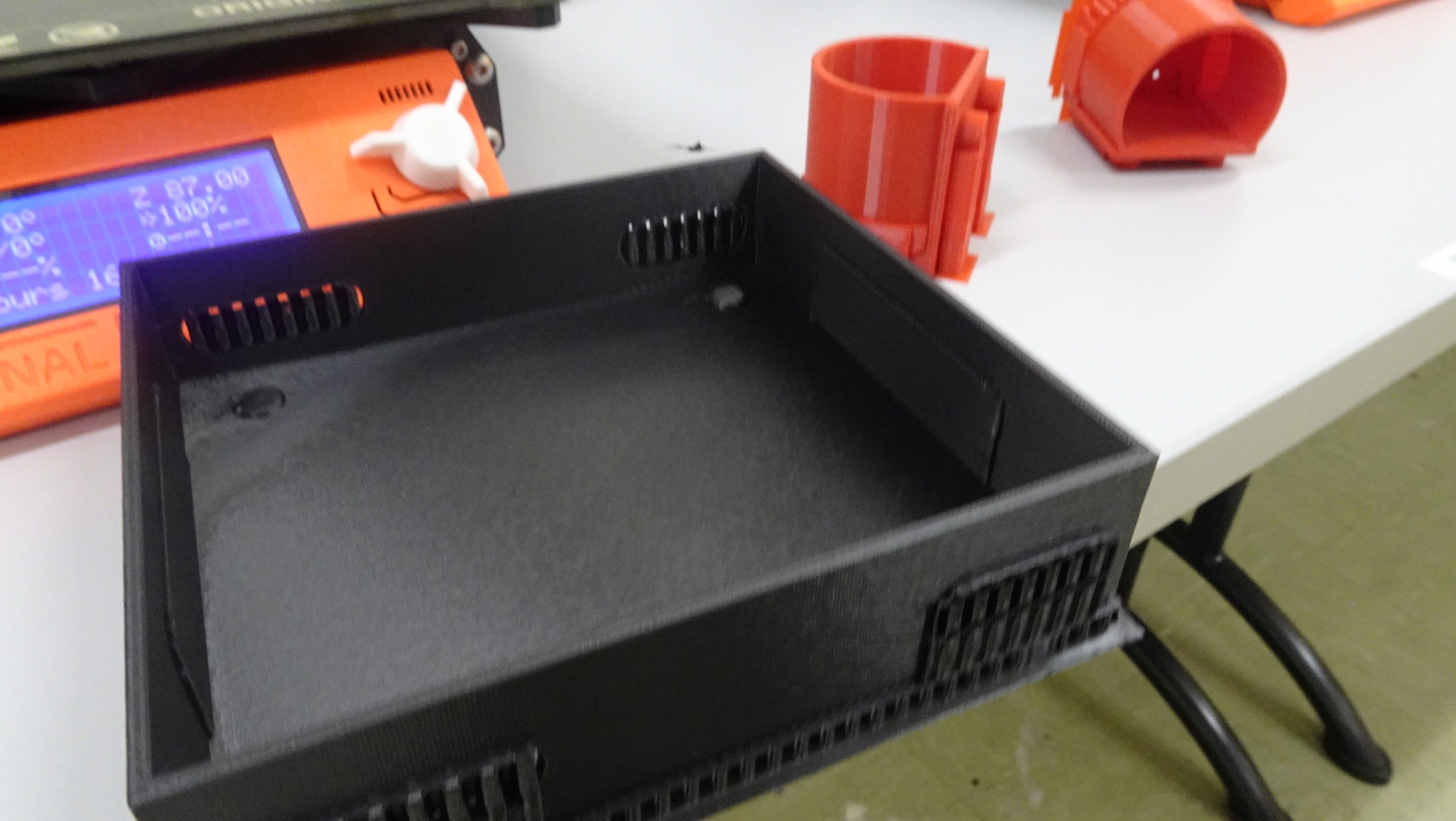
### 3 3D printing and cutting (laser,milling )
-electronics board
-body pieces
### 4 programming
esp32 + esp32 cam¶
DATASHEET: CLIC HERE
#### CODE WITH ARDUINO IDE
#include "esp_camera.h"
#include <WiFi.h>
#include "esp_timer.h"
#include "img_converters.h"
#include "Arduino.h"
#include "fb_gfx.h"
#include "soc/soc.h" // disable brownout problems
#include "soc/rtc_cntl_reg.h" // disable brownout problems
#include "esp_http_server.h"
// Replace with your network credentials
const char* ssid = "YELLOLAB_WIFI_ADMIN";
const char* password = "Y'ELLOLAB@AD23";
#define PART_BOUNDARY "123456789000000000000987654321"
#define CAMERA_MODEL_AI_THINKER
//#define CAMERA_MODEL_M5STACK_PSRAM
//#define CAMERA_MODEL_M5STACK_WITHOUT_PSRAM
//#define CAMERA_MODEL_M5STACK_PSRAM_B
//#define CAMERA_MODEL_WROVER_KIT
#if defined(CAMERA_MODEL_WROVER_KIT)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 21
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 19
#define Y4_GPIO_NUM 18
#define Y3_GPIO_NUM 5
#define Y2_GPIO_NUM 4
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#elif defined(CAMERA_MODEL_M5STACK_PSRAM)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 25
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 32
#define VSYNC_GPIO_NUM 22
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#elif defined(CAMERA_MODEL_M5STACK_WITHOUT_PSRAM)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 25
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 17
#define VSYNC_GPIO_NUM 22
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#elif defined(CAMERA_MODEL_AI_THINKER)
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#elif defined(CAMERA_MODEL_M5STACK_PSRAM_B)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 22
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 32
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#else
#error "Camera model not selected"
#endif
#define MOTOR_1_PIN_1 14
#define MOTOR_1_PIN_2 15
#define MOTOR_2_PIN_1 13
#define MOTOR_2_PIN_2 12
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
httpd_handle_t camera_httpd = NULL;
httpd_handle_t stream_httpd = NULL;
static const char PROGMEM INDEX_HTML[] = R"rawliteral(
<html>
<head>
<title>ESP32-CAM Robot</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<style>
body { font-family: Arial; text-align: center; margin:0px auto; padding-top: 30px;}
table { margin-left: auto; margin-right: auto; }
td { padding: 8 px; }
.button {
background-color: #2f4468;
border: none;
color: white;
padding: 10px 20px;
text-align: center;
text-decoration: none;
display: inline-block;
font-size: 18px;
margin: 6px 3px;
cursor: pointer;
-webkit-touch-callout: none;
-webkit-user-select: none;
-khtml-user-select: none;
-moz-user-select: none;
-ms-user-select: none;
user-select: none;
-webkit-tap-highlight-color: rgba(0,0,0,0);
}
img { width: auto ;
max-width: 100% ;
height: auto ;
}
</style>
</head>
<body>
<h1>ESP32-CAM Robot</h1>
<img src="" id="photo" >
<table>
<tr><td colspan="3" align="center"><button class="button" onmousedown="toggleCheckbox('forward');" ontouchstart="toggleCheckbox('forward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Forward</button></td></tr>
<tr><td align="center"><button class="button" onmousedown="toggleCheckbox('left');" ontouchstart="toggleCheckbox('left');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Left</button></td><td align="center"><button class="button" onmousedown="toggleCheckbox('stop');" ontouchstart="toggleCheckbox('stop');">Stop</button></td><td align="center"><button class="button" onmousedown="toggleCheckbox('right');" ontouchstart="toggleCheckbox('right');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Right</button></td></tr>
<tr><td colspan="3" align="center"><button class="button" onmousedown="toggleCheckbox('backward');" ontouchstart="toggleCheckbox('backward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Backward</button></td></tr>
</table>
<script>
function toggleCheckbox(x) {
var xhr = new XMLHttpRequest();
xhr.open("GET", "/action?go=" + x, true);
xhr.send();
}
window.onload = document.getElementById("photo").src = window.location.href.slice(0, -1) + ":81/stream";
</script>
</body>
</html>
)rawliteral";
static esp_err_t index_handler(httpd_req_t *req){
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, (const char *)INDEX_HTML, strlen(INDEX_HTML));
}
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
Camera test¶
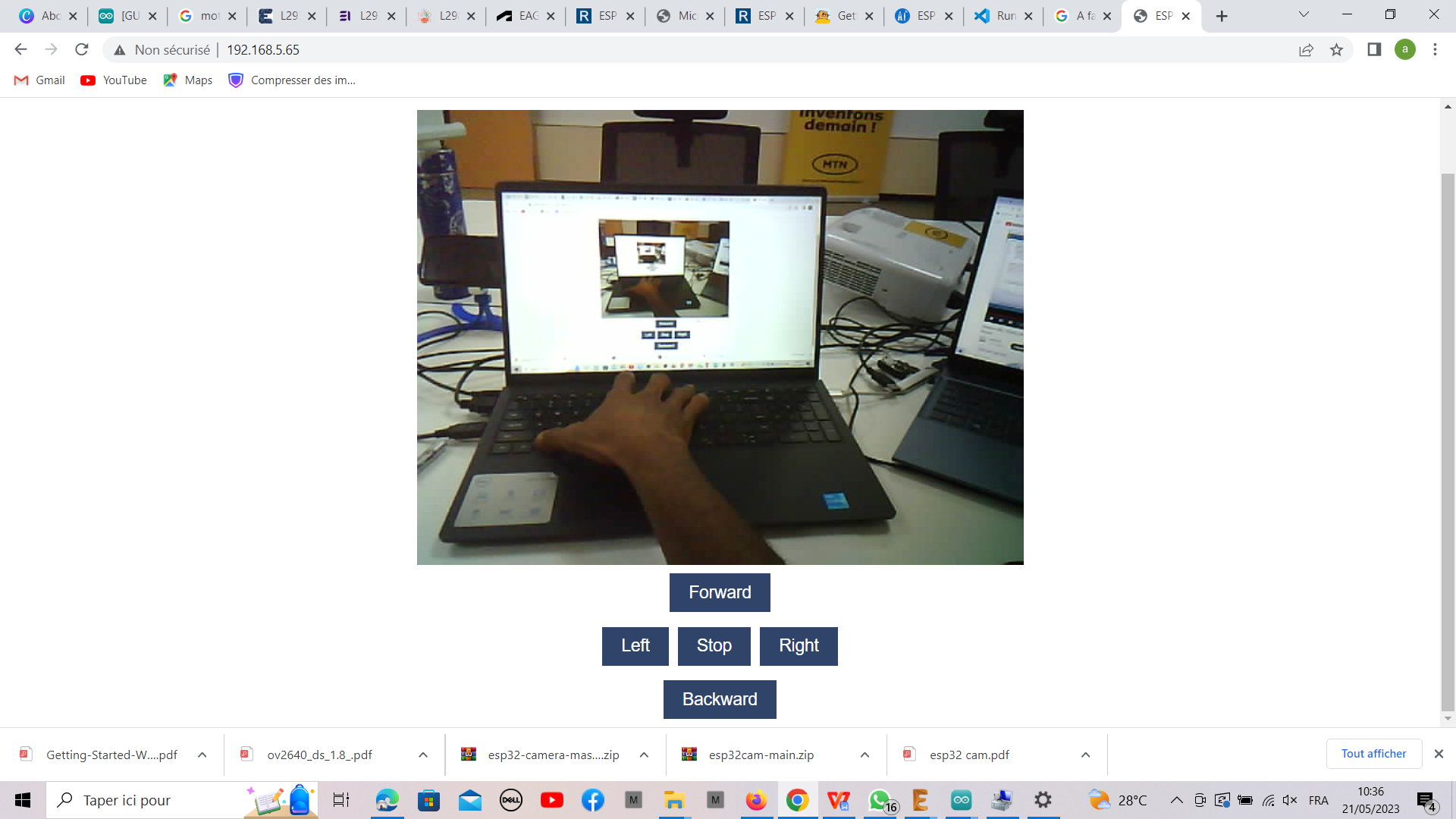
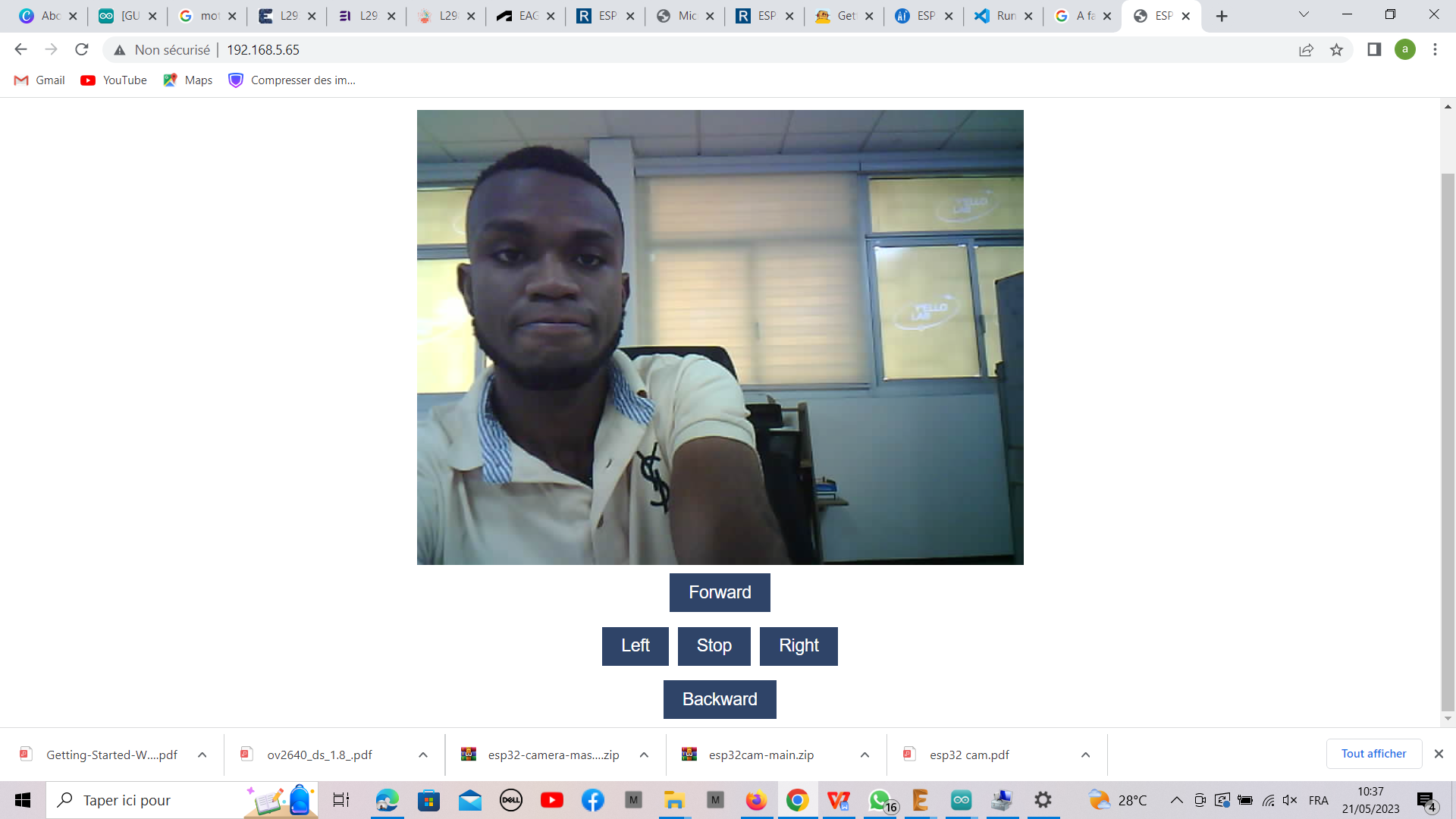
code explaination: your can take this useful tutorial.
- motors
5 assembly part and config.¶
- Body piece assembly

FILES¶
i didn’t used shopbot but this is all cutting part on V carve.
Last update:
July 2, 2023