WEEK 9 - Input Devices
INTRODUCTION
I think these weeks will never be forgotten, we are in the third month and the world is still under pandemic, but we are trying to help with digital fabrication, and i think we have done a good job so far.
Assignment Description
- measure something: add a sensor to a microcontroller board that you have designed and read it
individual assignment:
components
- Servo Motor
- Attiny 44
- 1 R 10kohm
- 1 capacacitor 1uf
- 3 AvrISP pin head
- 1 Resonator 20MHz
- POT 20K
- push button
Circuit
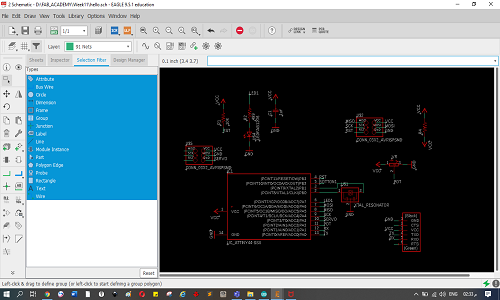
The Idea: I need to make a start/stop button for the code, and control my servo with 90 dgree by using POT
I used Eagle to design my board
you can learn more about Eagle here
and I used Hello echo board
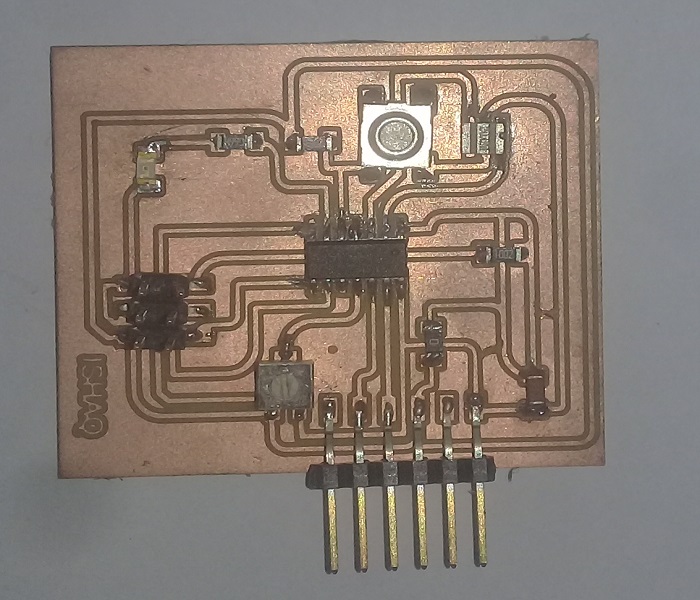
Hello Echo board
- I started with Hello Echo board
- Now we need to make an action with POT
- we can consider the POT is an analog sensor
- so, we can read the analog with arduino via analog ports
- this syntax to read it
int sensorValue = analogRead(A0);
- this the simple code to proof that
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
int sensorValue = analogRead(A0);
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(sensorValue); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(sensorValue); // wait for a second
}
#define pb 2
#define pb1 3
#define buz 11
int count=0;
void setup()
{
pinMode(pb,INPUT_PULLUP);
pinMode(pb1,INPUT_PULLUP);
pinMode(buz,OUTPUT);
}
void loop()
{
if(digitalRead(pb)==LOW)
{
delay(10);
while(digitalRead(pb)==LOW);
count++;
if(count==2) count=0;
}
if(digitalRead(pb1)==LOW&&count==true)
{
delay(10);
digitalWrite(buz,HIGH);
}else digitalWrite(buz,LOW);
}
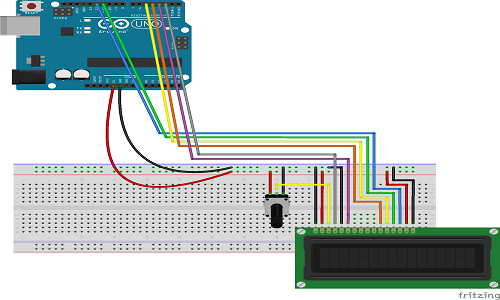
Circuit with Arduino
- the same idea here, we need control the duration of motion for servo motor
Note
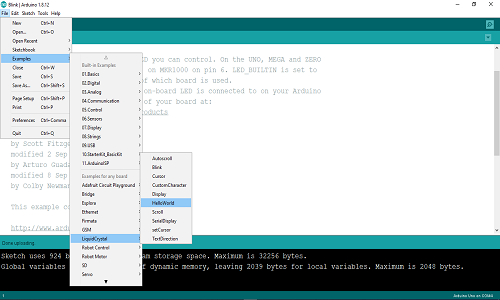
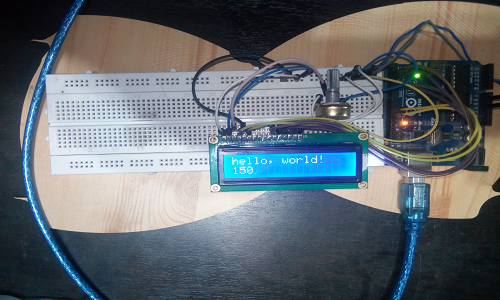
: This circuit is for both input and output, but what interests us here is the input, which is represented here by the POT- its very easy, you can open Arduino IDE
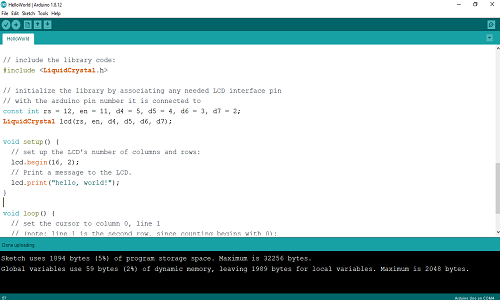
- and go to the examples and choose the liquid crystal
- just follow the instructions
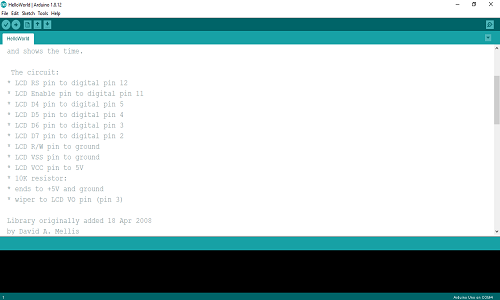

Programming
- I built my code on the Hellow world example, and sweep for servo
- based on my idea, I devided the movement of servo to tow sections with 90 degree:Inhaling for Right moving, Exhaling for left moving
- to simplify my code, i built tow VOID functions for Inh and Exh
all documents here