WEEK 11 - Output Devices
INTRODUCTION
I think these weeks will never be forgotten, we are in the third month and the world is still under pandemic, but we are trying to help with digital fabrication, and i think we have done a good job so far.
Assignment Description
- add an output device to a microcontroller board you've designed, and program it to do something
individual assignment:
components
- Servo Motor
- Attiny 44
- 1 R 10kohm
- 1 capacacitor 1uf
- 3 AvrISP pin head
- 1 Resonator 20MHz
- POT 20K
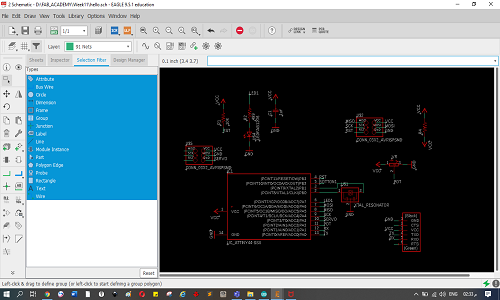
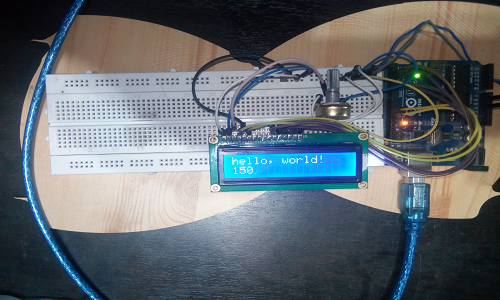
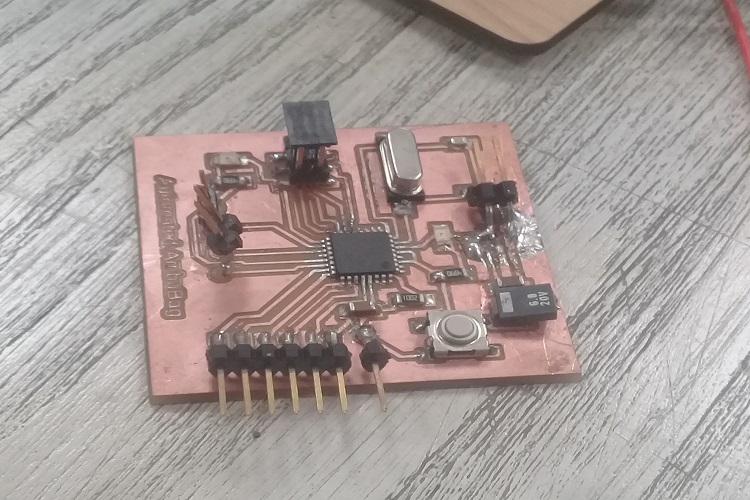
Circuit
The Idea: I need to control my servo with 90 dgree by using the Arduino, and i need to adjust the speed
I used Eagle to design my board
you can learn more about Eagle here
and I used Hello echo, after I modified it
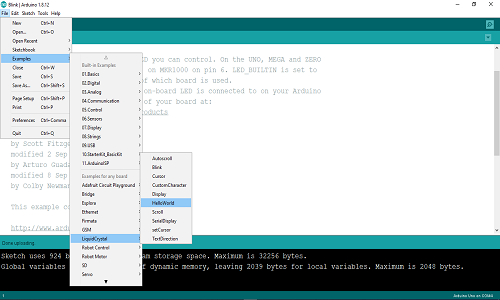
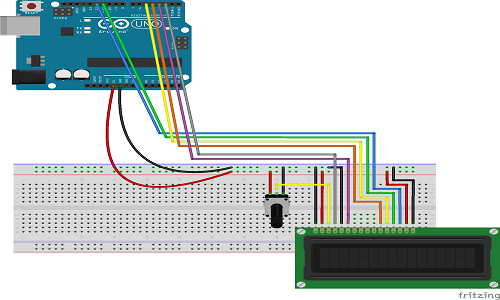
Circuit with Arduino
- its very easy, you can open Arduino IDE
- and go to the examples and choose the liquid crystal
- just follow the instructions

Programming
- I built my code on the Hellow world example, and sweep for servo
- based on my idea, I devided the movement of servo to tow sections with 90 degree:Inhaling for Right moving, Exhaling for left moving
- to simplify my code, i built tow VOID functions for Inh and Exh
Code
// include the library code:
//#include
#include
LiquidCrystal_I2C lcd(0x27,20,4); // set the LCD address to 0x27 for a 16 chars and 2 line display
#include
//const int rs = 12, en = 11, d4 = 5, d5 = 4, d6 = 3, d7 = 2;
//LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
Servo myservo; // create servo object to control a servo
int pos = 0; // analog pin used to connect the potentiometer
int val=0; // variable to read the value from the analog pin
int potpin = 0;
int a=0;
int value=0;
int T=0;
int dn=0;
int val2=0;
int hold=0;
void setup() {
lcd.init(); // initialize the lcd
// Print a message to the LCD.
lcd.backlight();
myservo.attach(9); // attaches the servo on pin 9 to the servo object
// set up the LCD's number of columns and rows:
//lcd.begin(16, 2);
Serial.begin(9600);
// Print a message to the LCD.
lcd.print("Breathing");
T=millis();
}
void loop() {
val=analogRead(A0);
val = map(val, 0, 1023, 0, 25);
value=val+9;
Serial.println(value);
lcd.setCursor(0, 1);
lcd.print(value);
val2=analogRead(A1);
hold= map(val2, 0, 1023, 0, 500);
lcd.setCursor(11, 0);
lcd.print("Hold");
lcd.setCursor(12, 1);
lcd.print(hold);
INH();
delay(hold/2);
EXH();
delay(hold);
lcd.setCursor(3, 1);
lcd.print(millis() / 1000);
dn=((millis()-T)/1000);
if(dn>=60){
a=0;
millis();
T=millis();
dn=0;
}else{
a++;
lcd.setCursor(7, 1);
lcd.print(a);}
}
void INH(){
for (pos = 0; pos <= 90; pos += 1) { // goes from 0 degrees to 90 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(val-4); // waits (val value)for the servo to reach the position
}
}
void EXH(){
for (pos = 90; pos >= 0; pos -= 1) { // goes from 90 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(val+5); // waits (val value)for the servo to reach the position
// lcd.setCursor(0, 1);
// lcd.print(pos);
}
}
Servo motor test for final project
all documents here