
Big 3D-Printer
With a maximum volume of 150 x 90 x80 cm
Some of our Ultimaker
We´ve got more than 25 3D-Printer of diffrent types

Greeting
Our best employee in HRW FabLab
Final Project
Concept
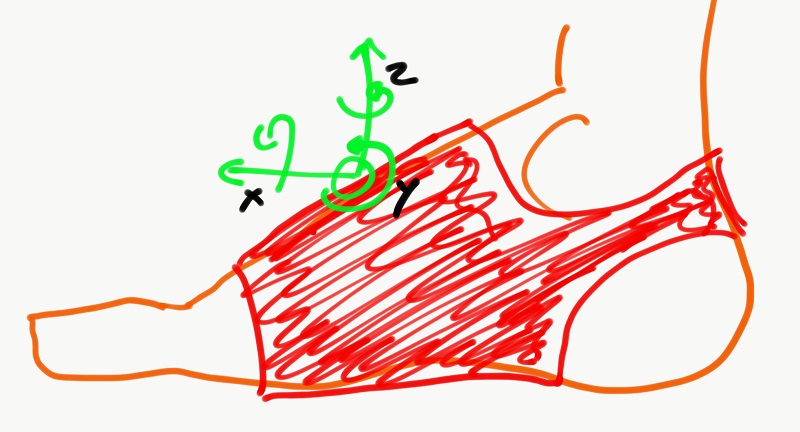
During the FabAcademy I developed my idea of a foot controller. I learned a lot of new technologies and especially my programming skills raised from zero to maybe 3. 😊 So I thought a more flexible and smaller system would be more interesting. In my first idea I thought about a mechanical position tracking but during the Academy I found a lot of sensors which are also able to track the position and also motion. So I decided to use a gyroscope and accelerometer to track the foot position.Another pro of this approach is the flexibility. So my system will not only work with the foot but also with any other body part. You only need a fitting adapter to it. The complete system would be clearly smaller what is another pro. So see the idea in the sketch below.
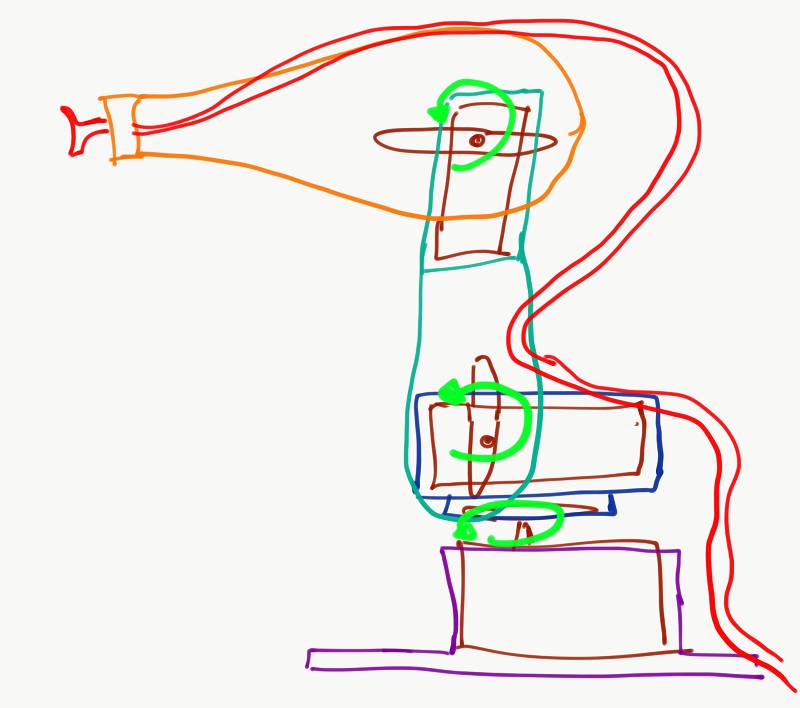
Because I learned a lot about networking, protocols and the problems of integrating new systems into given ones I decided to develop a closed system. My first idea to create a controller which is a plug and play option for any device like computers or industrial robot arms would be a lot of programming work. Also industrial robot are closed systems to, so there is not a simple way to connect them with a external controller. So I decided to develop my own robot arm which works like a demonstrator for what my foot controller is able to achieve. In the first step I wanted to keep it simple and build a system with “only” three degrees of freedom and a grab function. See here the first sketch of it:
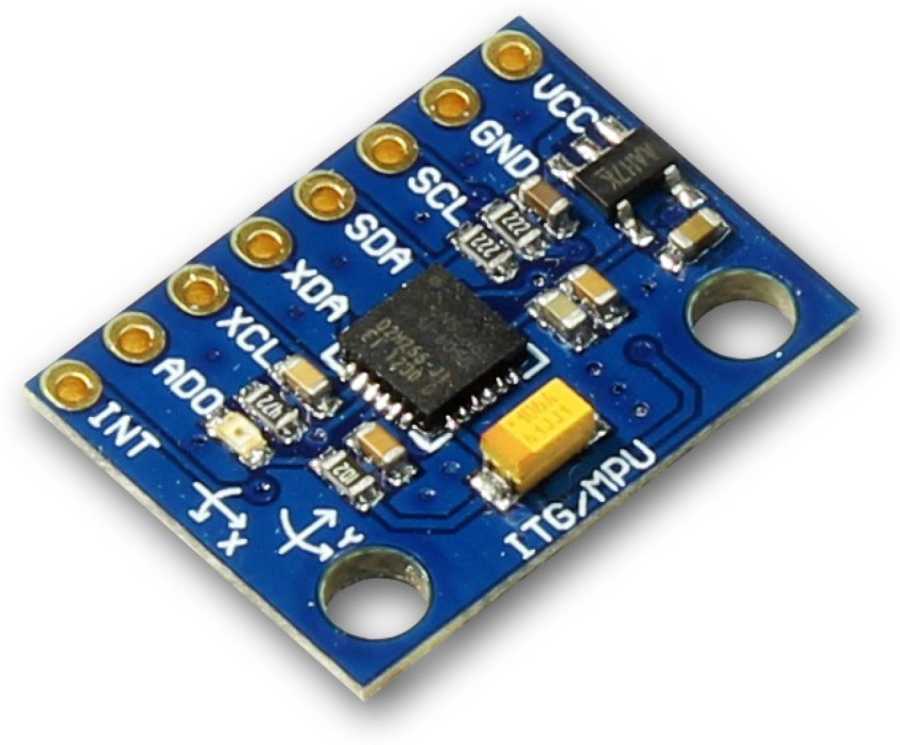
After some research a found the MPU 6050 modul which is a quite small combination of a gyroscope an accelerometer. With this small device and some math I´l be able to detect nine degrees of freedom: acceleration along the X, Y and Z-axis, the rotation around the three axis and the tilt angle around the three axis. So there is a lot of space to develop the system. See the modul below:
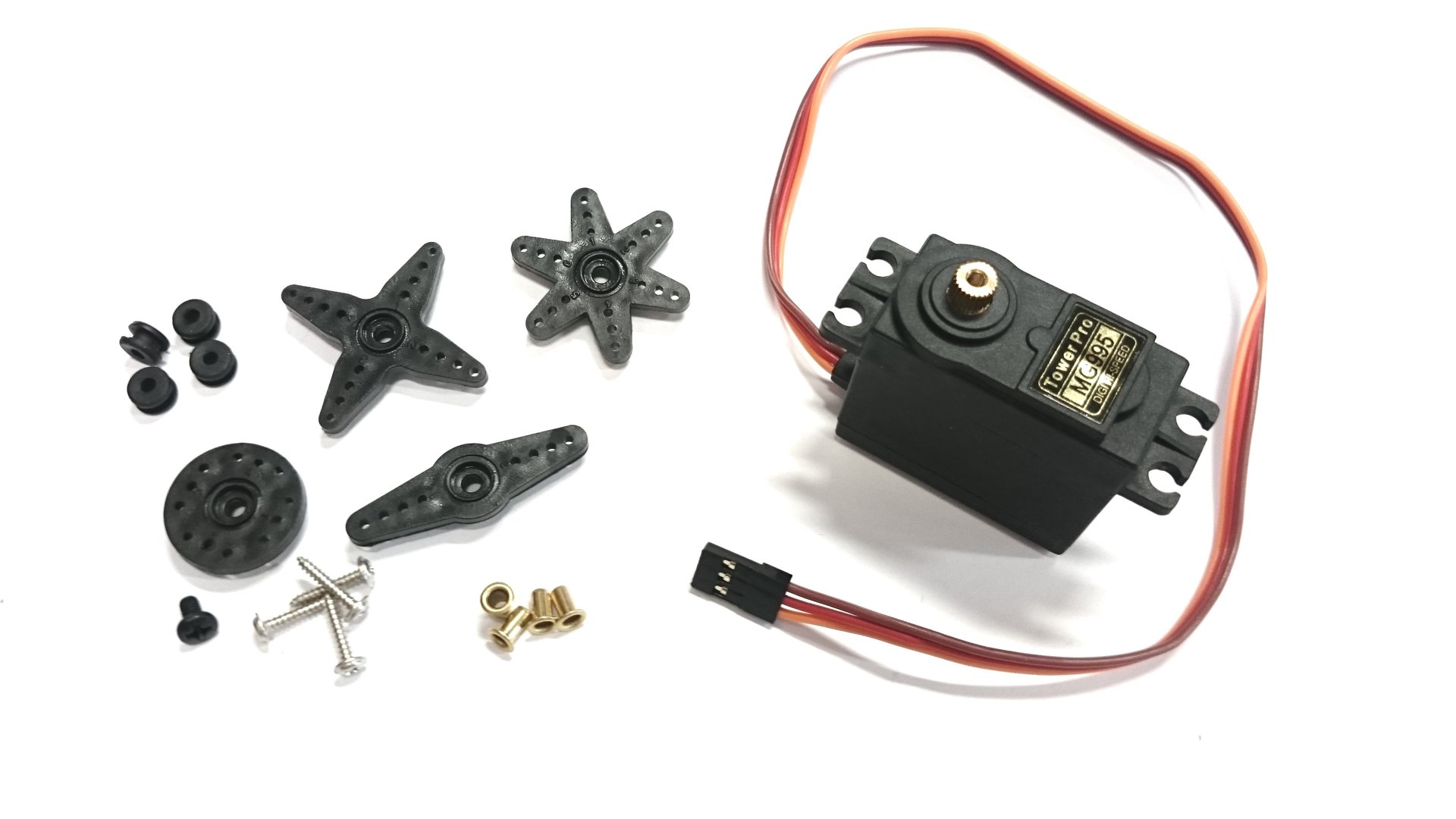
To make my robot arm move I used duration servo. That makes the control a lot more easy and I´m not limited to 180 or 360 degrees. For my robot arm I used the Tower Pro MG995 servos because they are really cheap and strong. Badly they are not that accurate so I noticed later it is hard to control them for precise works but the system will allow you to choose any servo you want and upgrade my system.
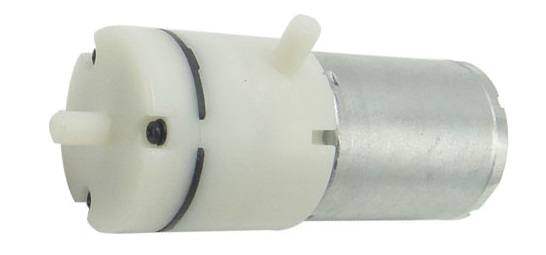
For my grab system I decided to use a small 12V vacuumpump to keep the function simple. Here you can find small ones for less than 5$ which are really strong. I tested it and lifted up to 1,5kg objects with a clean surface. See here the used pump:
After defining the concept, let´s start develop the system 😊
Downloads
| Datasheets | download |
