10. Mechanical Design
Group assignment:
- Design a machine that includes mechanism + actuation + automation + application. Build the mechanical parts and operate it manually and document the group project, also documenting your individual contribution to the project.


Link to the final video here
After quite some discussions about what to do for this week, we decided to try and prove or further disprove that birds aren't real, by attempting to recreate our own surveillance pigeon. Born from conspiracy (or not), this was the task at hand...

RUPEV
- Real
- Urban
- Pigeon
- Eye
- View
We want to build a "real" urban pigeon to mingle with the local population of pigeons at Waag. Why? we speculate that pigeons aren't real and blending amongst the local pigeon population we aim to debunk or further reinforce the theory.
What I did
Mechanics
After some research feeding the pigeons we took to trying to replicate the head and feet movement. I starting with 2D modeling how the bird could move using split pins and card and managed to get a nice head bob and walk simulation.

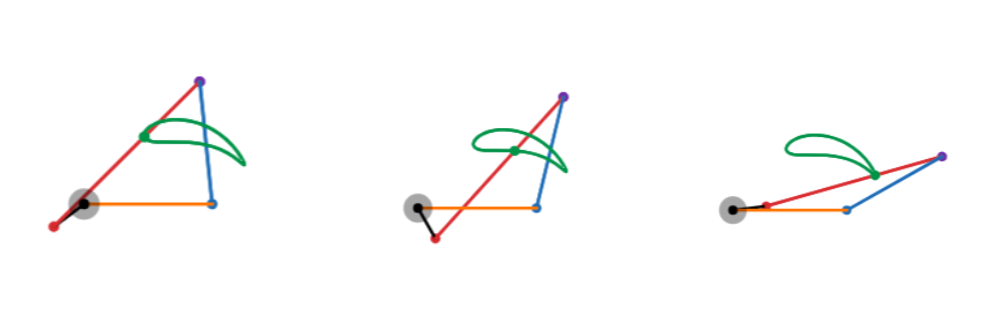
This actually worked quite well, but was the correct ratio of head to foot movements. I went onto a simulation website called Demos to get a better idea of what we needed for the head movement. This is a great tool to use, I played around with the 4-bar link simulation and was able to get the right movement for the head.
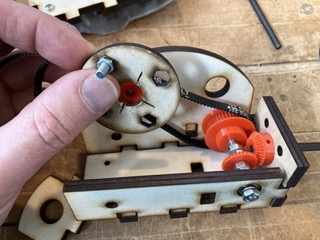
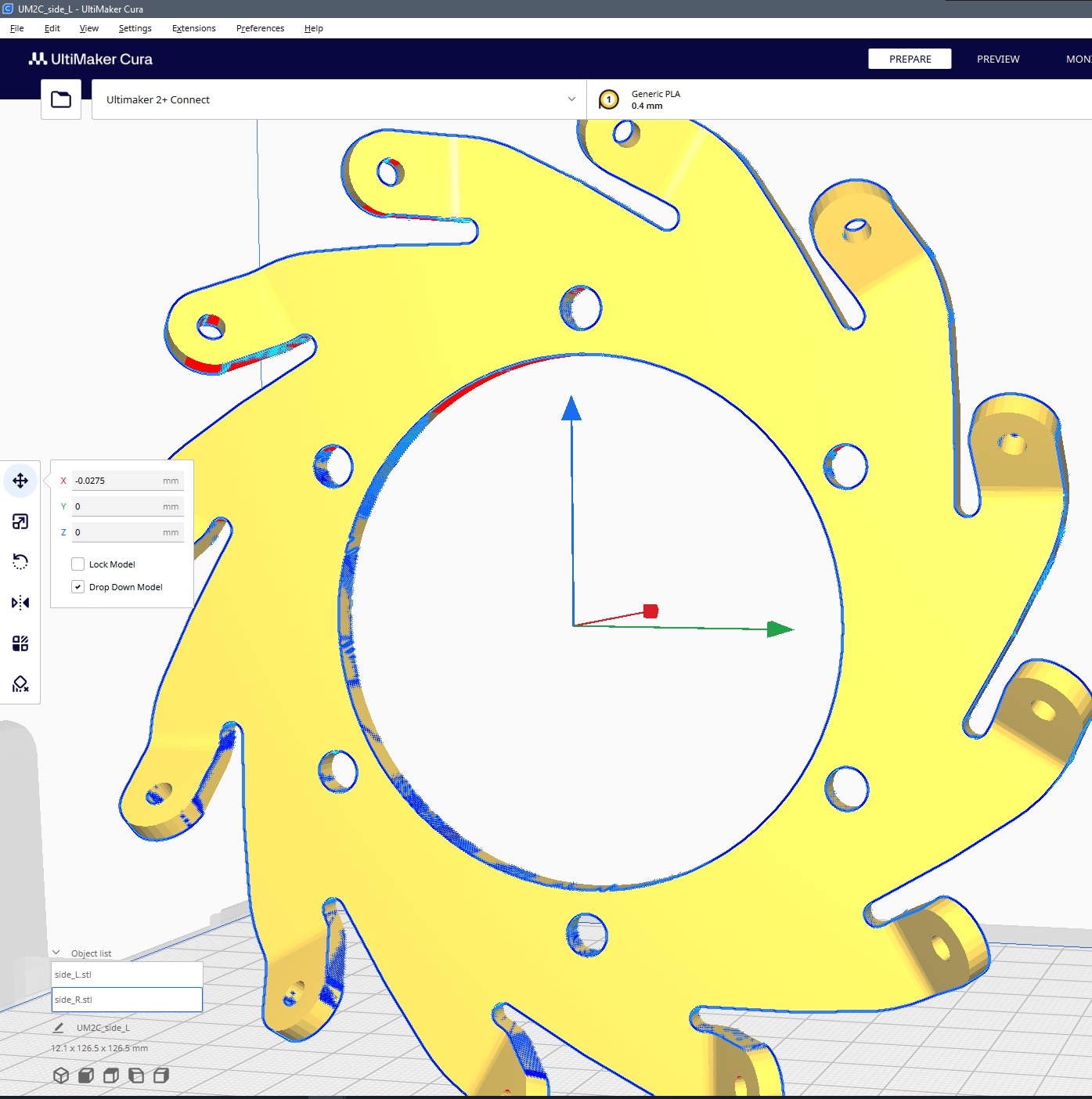
I then went about making parts to construct the mechanism, we had a drive shaft entering the rear of the pigeon and we needed an gear and pulley system with 2:1 ratio for head to feet. I manufactured some parts to test the principles of the head moving.
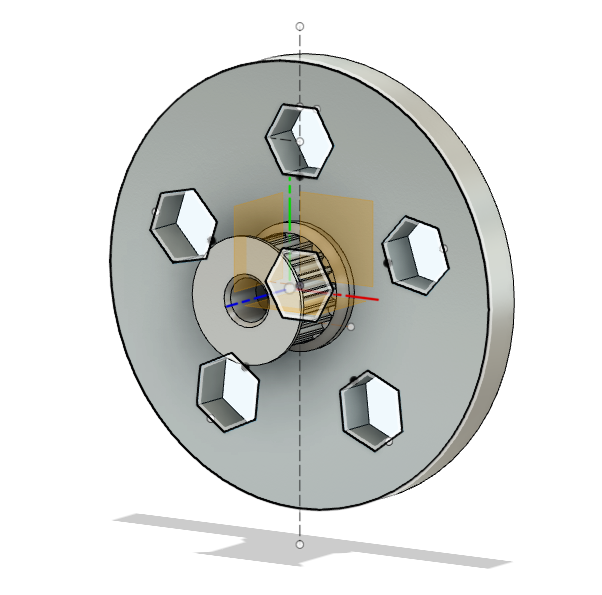
I then dug around online and found some really nice parametric pulley designs from Grab cad an open source CAD design website where you can look up all kinds of designs and use their files. From the design file i was able to edit the body to suit our need.
Feet
Leo was in charge of the feet mechanism, but I wanted to give them a realistic look, so I found some bird feet on thingyverse.
Once printed, I removed the springs from crocodile clips and attached them to some frankin legs I designed on fusion.

Audio
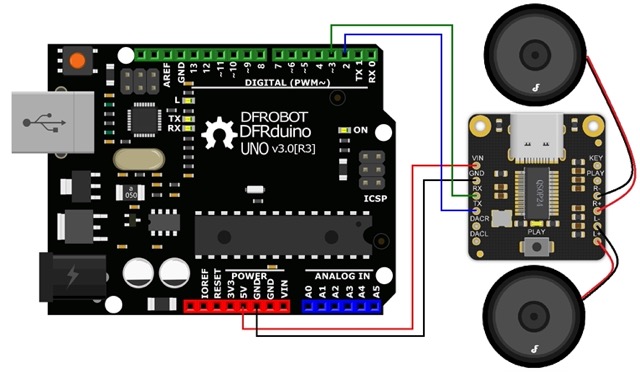
For the audio we used a DFPlayer Pro, A mini simple but powerful MP3 Player that connects to the aurduino where Edwin could do his magic and code so that we had switch controlled audio from the remote control.
I found various pigeon audio files from Freesound.org , I then used audacity to cut the pigeon coo's and normalize the files.

Omni Wheels
For the omni wheels, we already had a set from Edwin's home stock, but to make them completely Fab the original design was upgraded to include a nylon bush instead of bearings. The rollers were printed in various locations and then we needed to thread and heat shrink the "tyre" to the rollers. This was quite a challenge, threading PLA with a di made for metals has its own set of problems. You have to engage with quite a lot of force to create the thread, but even so you leave a worm of material behind. Sometimes you can pull it out with tweezers and sometimes you can't, making a slight blockage when you try to screw in. The next issue was the heat shrink, trying to get is to adhere the whole way around was near impossible without affecting the form of the roller, which is quiet essential for a wheel. Here are some of the fails before I let someone else try.



Narration
I was tasked with giving a short introduction to the project with a timeline of events, so if you read the group page, have a British accent in mind. You can read that here RUPEV
Conclusion
This week has been a lot of fun, especially working as a group to bring a frankin pigeon to life. It's maybe not the finished article we were hoping for, but I think It's amazing what we got done in such a short period. Just look at her...
