15. Wildcard week¶
This week we need to design and produce something with a digital fabrication process (incorporating computer-aided design and manufacturing) not covered in another assignment documenting the requirements that your assignment meets, and including everything necessary to reproduce.Possibilities include (but are not limited to) Here I gone for Soft Robotics gripper.
Soft Robotics¶
Soft robotics is a subfield of robotics that focuses on designing and constructing robots using soft, flexible materials and structures, as opposed to rigid components typically found in traditional robotics. Soft robots are characterized by their ability to deform, bend, stretch, or change shape to interact with their environment.soft robots utilize materials such as silicone, elastomers, textiles, or hydrogels, which allow for compliance and flexibility.
Here are some examples of soft robots that are currently being developed or used:
- Soft grippers that can gently pick up and manipulate delicate objects.
- Soft robots that can swim through water or crawl through narrow spaces.
- Soft robots that can mimic the movements of animals or humans.
- Soft robots that can be used to deliver drugs or perform surgery.
- Soft robots that can be used to clean up pollution or explore dangerous environments.
3D modelling and printing¶
First I made a rough sketch.
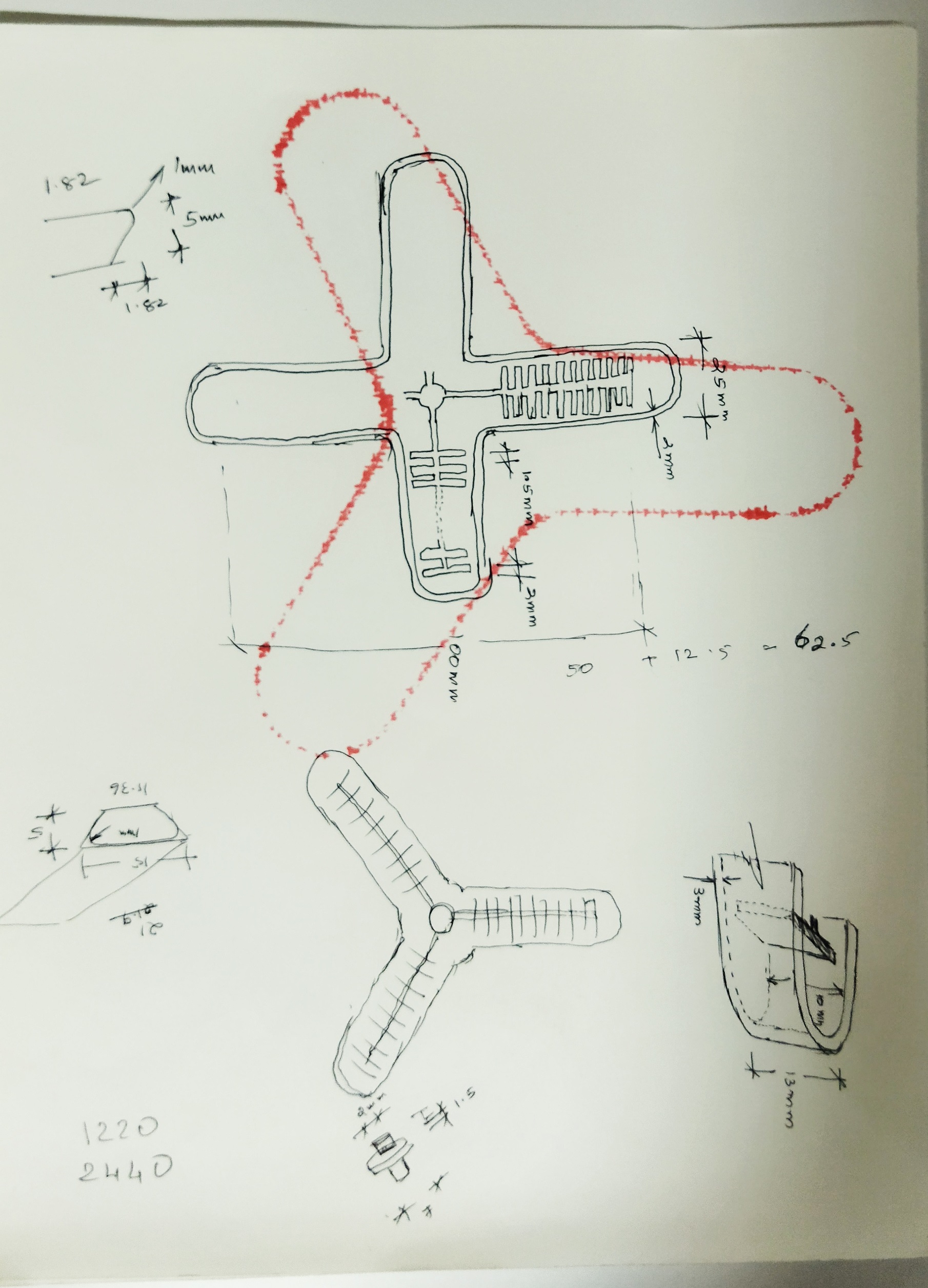
Then I made a 3D model of mold for the soft gripper. In this assignment, I decided to make a softgripper which have three arms.After that I made 3D drawing in Fusion 360.
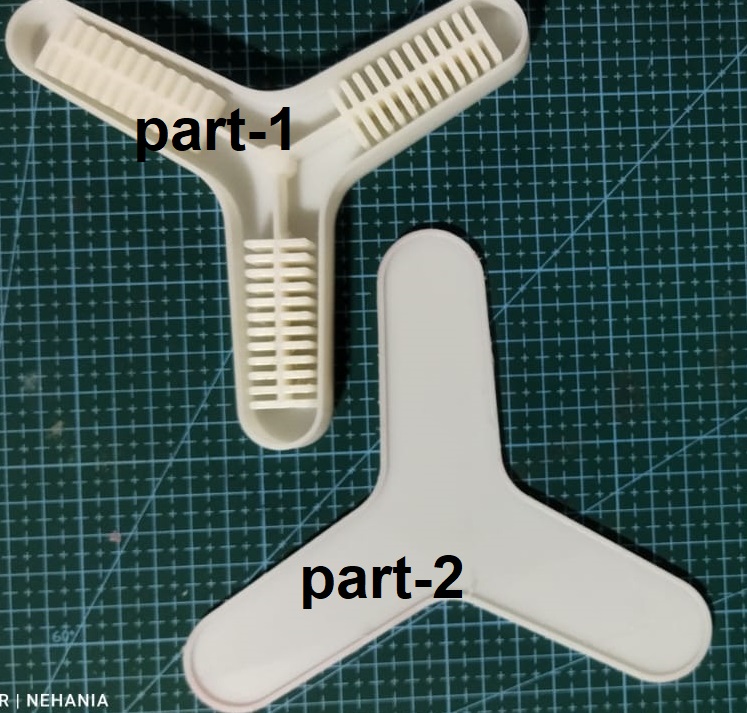
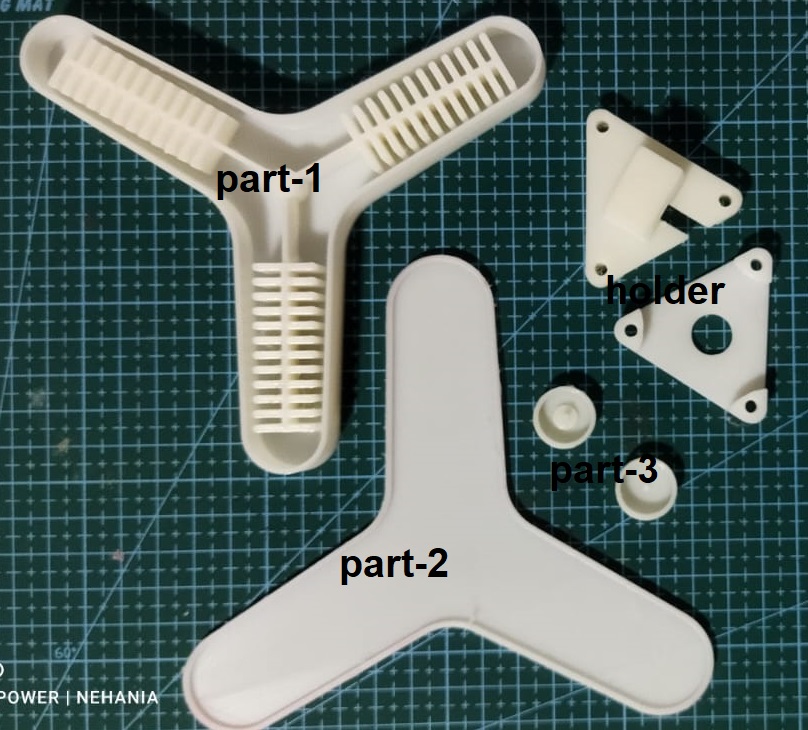
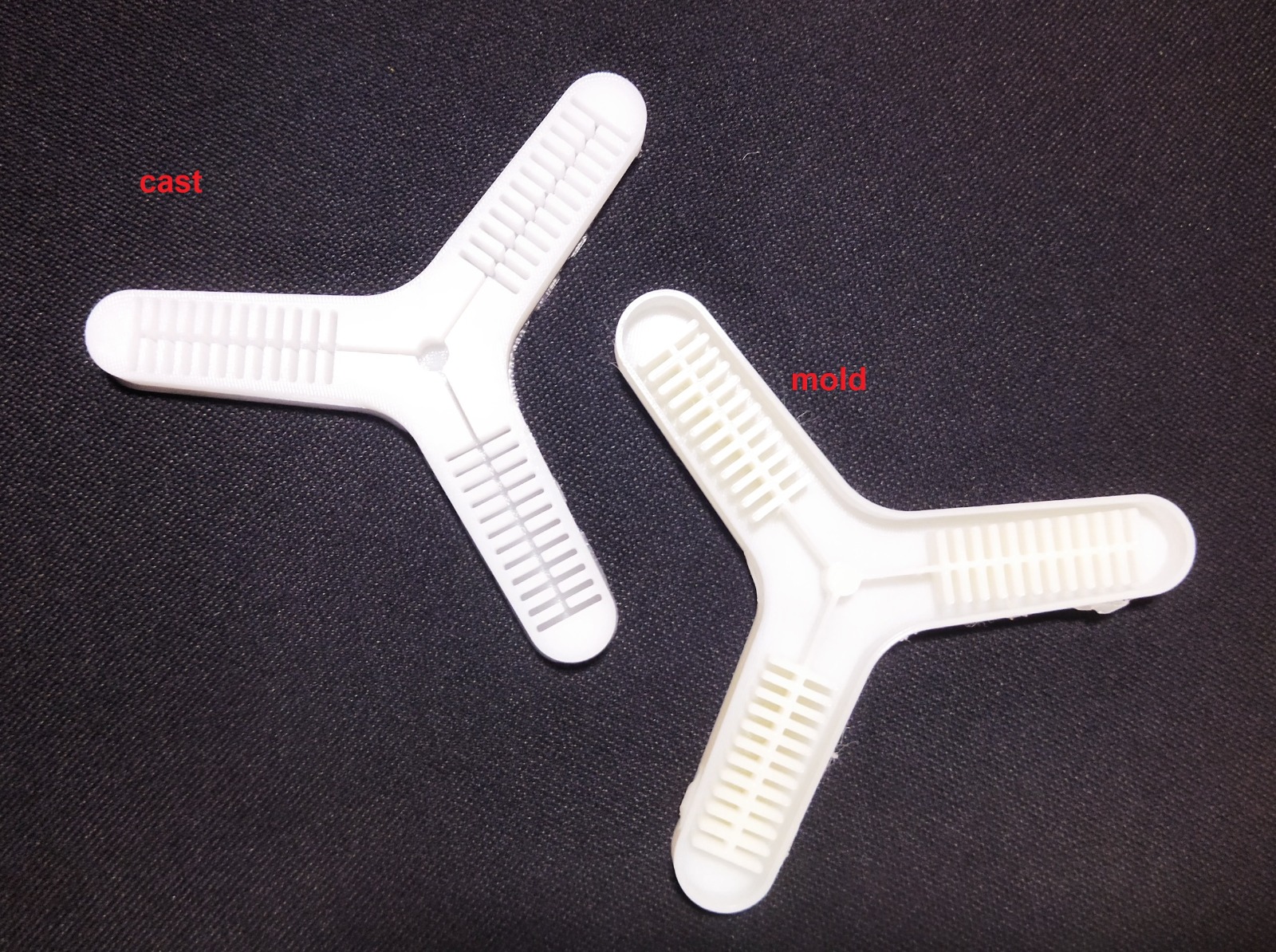
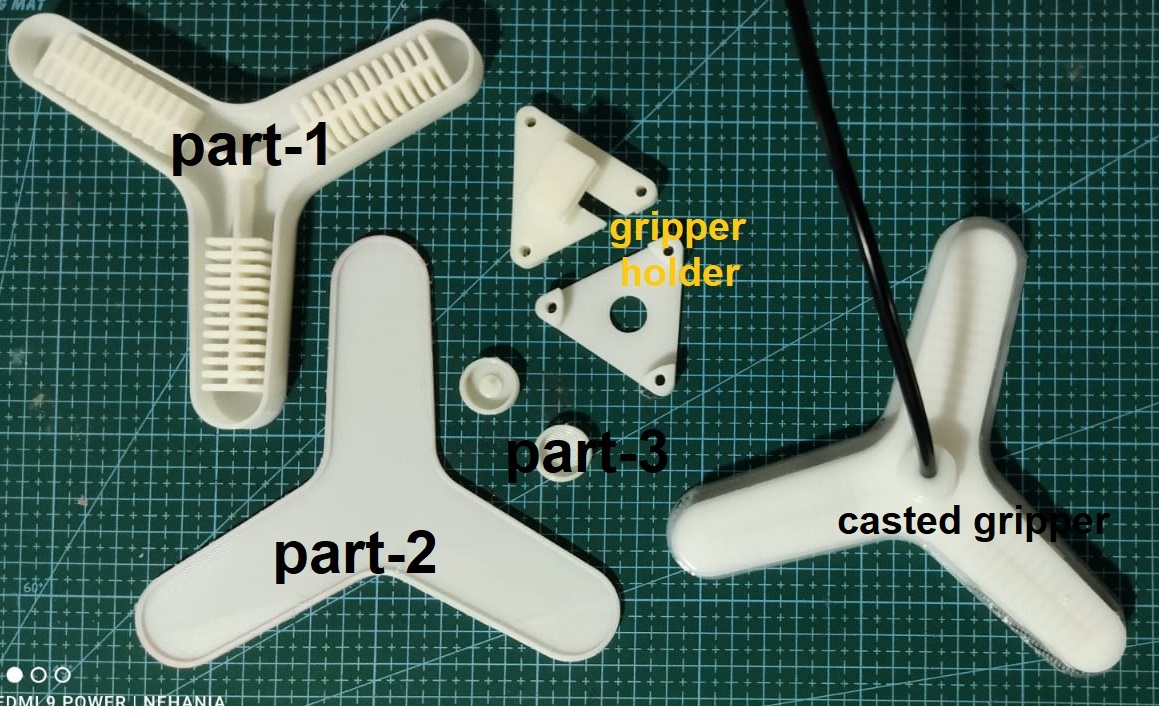
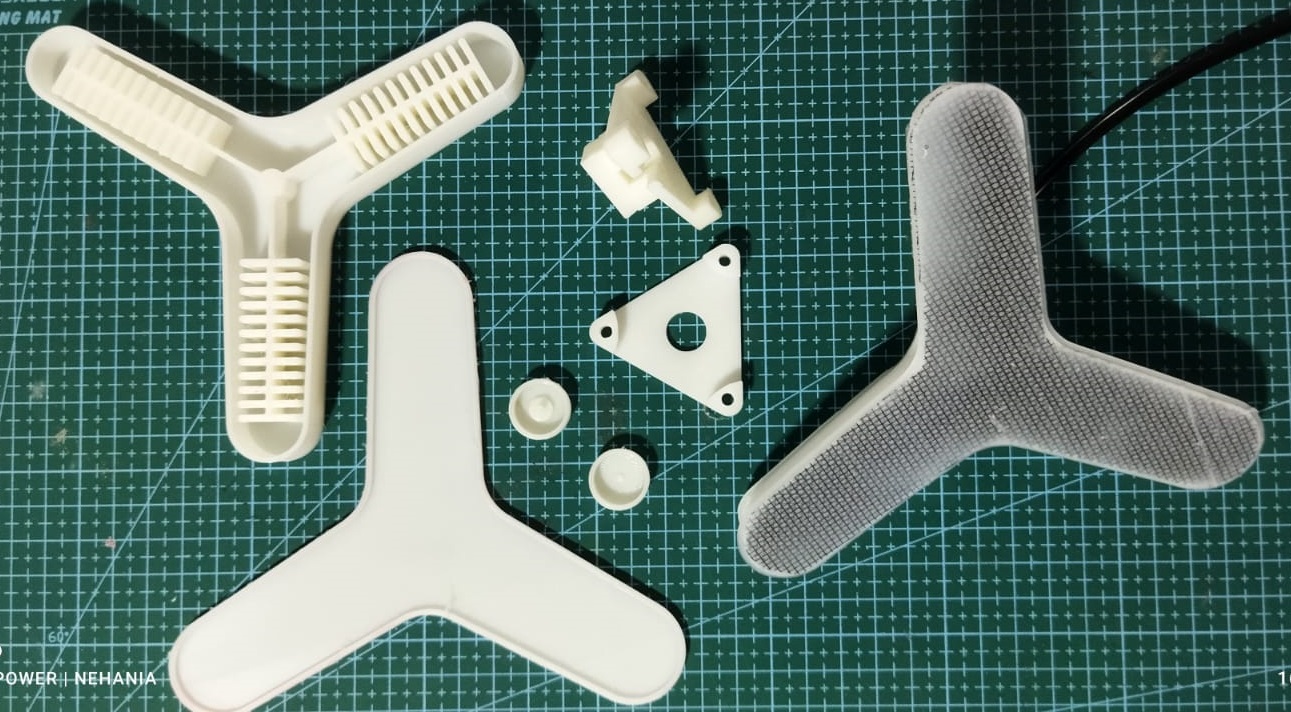
Made a 3D printed mould of graber. Call this as part-1.

Made a 3D printed base. Call this as part-2.
Made attachment for holding the graber for scara made on machine week.
Here I used Adithy brand Silicon rubber and curing agent. The composition is for Silicon rubber 1010 ML used 20-25 ML of harder.
In my case I used 65ML of silicon rubber and 1.6ML of curing agent

The result was good. It was a little difficlt to remove the softgripper from the mold.
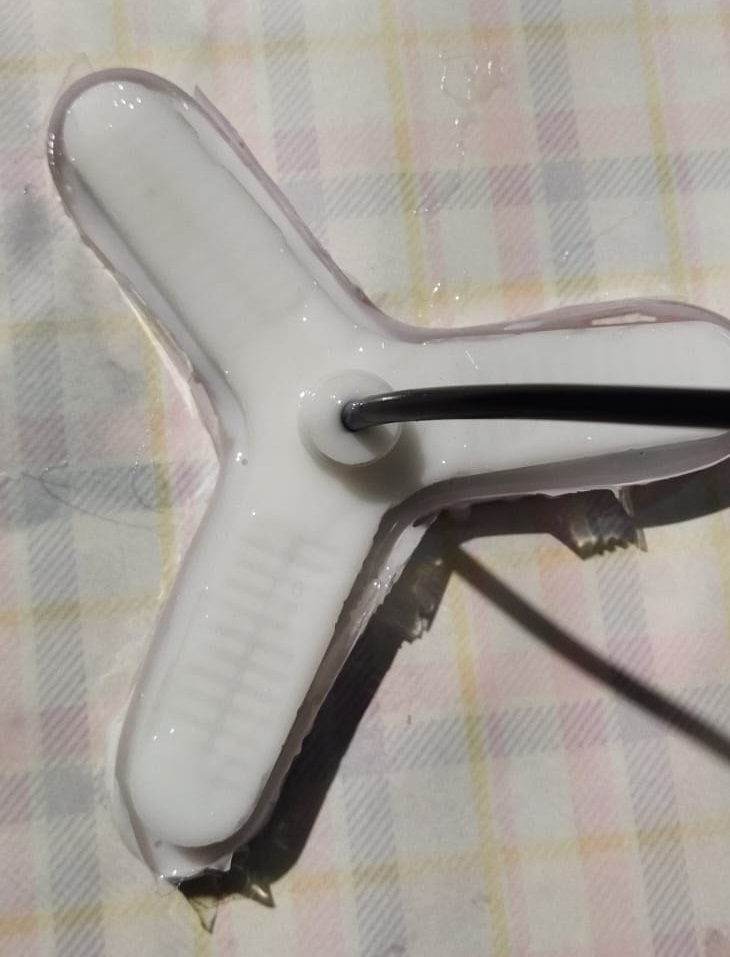
Then I connect a micro pneumatic tube to the cast by a barb connector to send air to the gripper. I put a small pin hole over the top center of the cast to insert the brab.


A barb connector or hose barb is the section of a fitting or component connected to a piece of hose or tubing by being inserted into that hose or tubing.
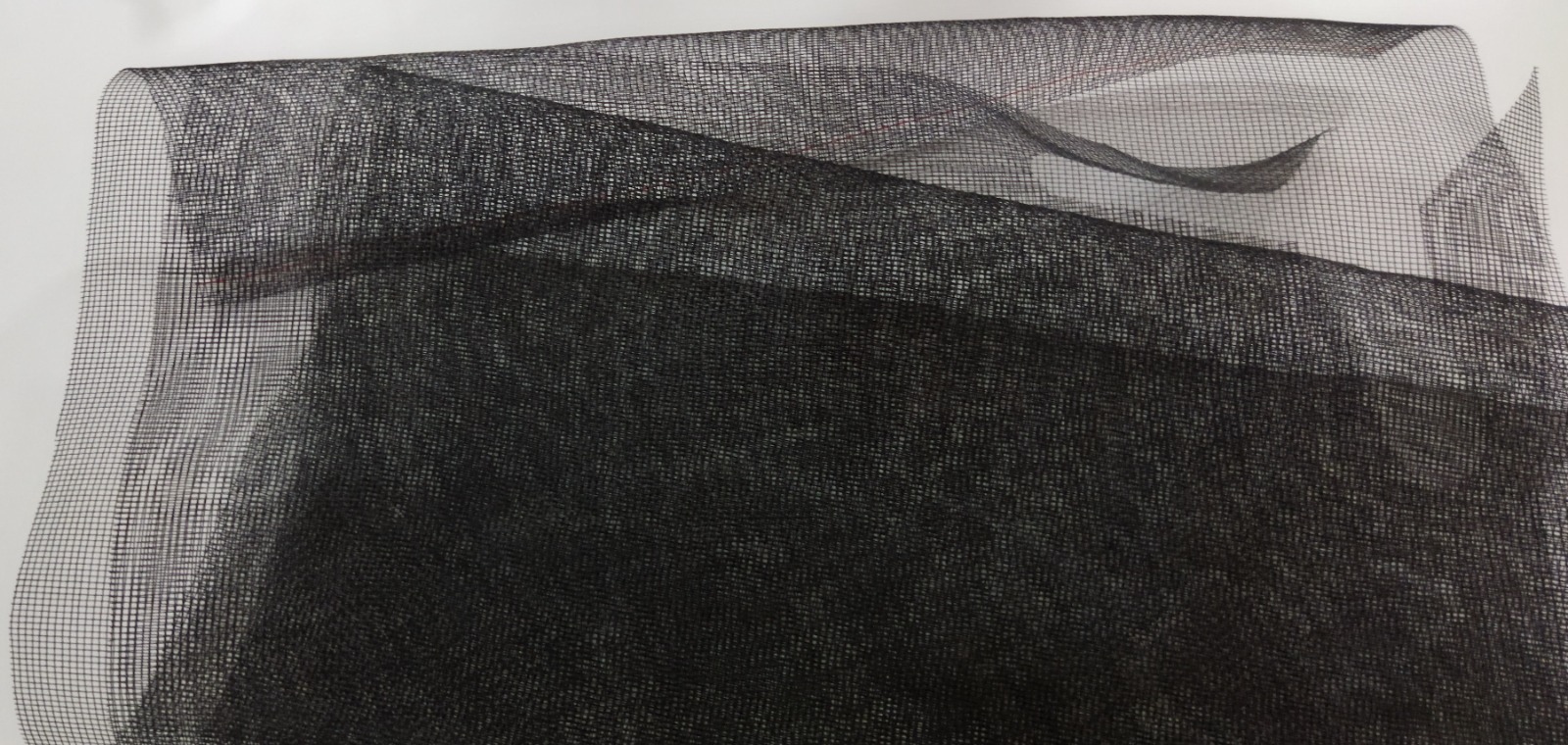
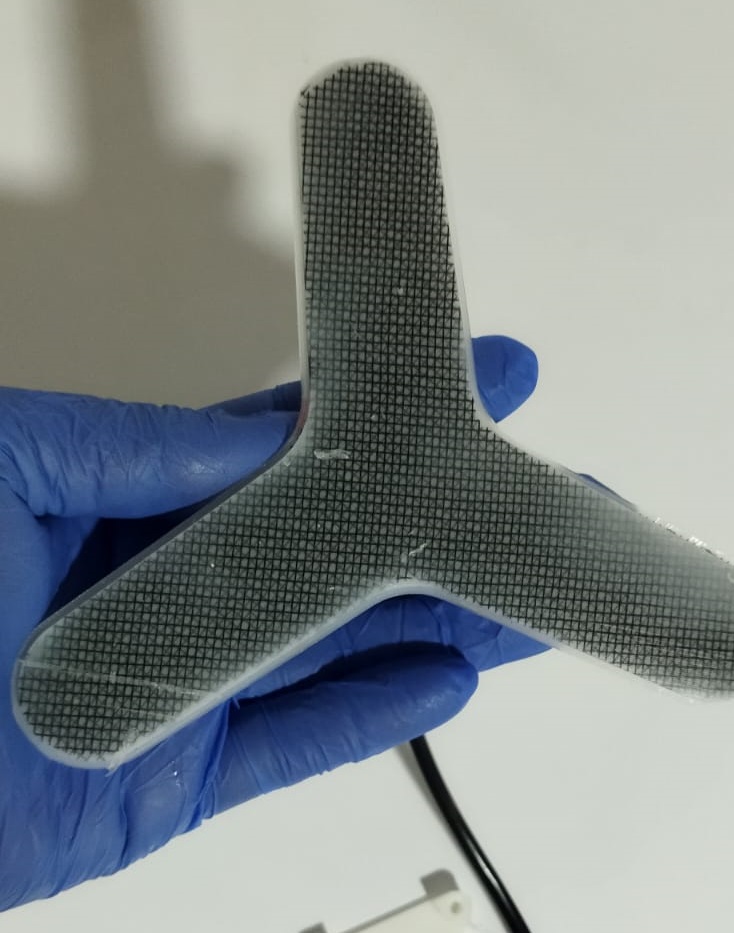
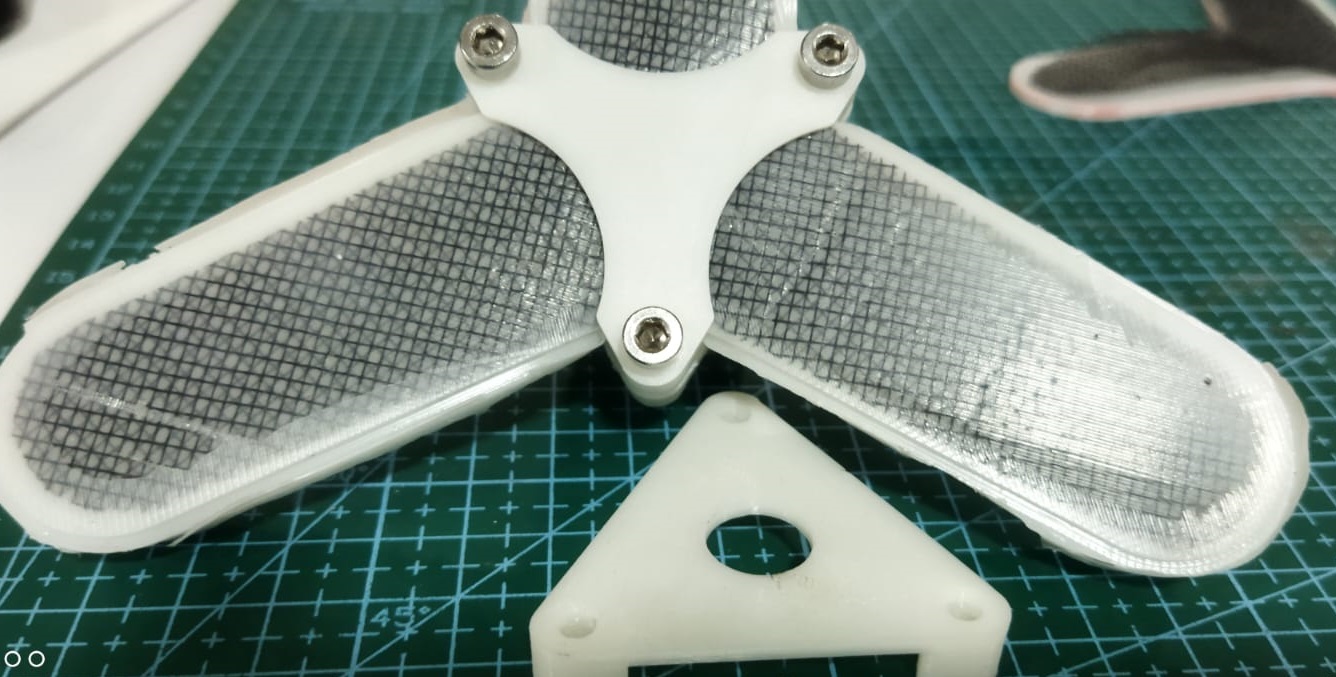
Next I took mosquito net for base as stiffner instead of fabric.Then I trace the mold onto it, to incorporate into part 2.
Mix a batch of Silicon rubber and curing agent (Mix thoroughly and slowly to reduces air pockets) to fill the volume of mold Part 2 and Part 3(This part is used to keep the air tube tight at the connetion point of the cast.).
Mix a mixture to fill the volume of mold Part 2.Pour a thin layer into the mold.Press the net into the mixture.Here I placed 2 nos of net to keep the gap of mesh closely.
Place part 1 of the soft gripper onto the mixture of Silicon rubber and hardning agent in part 2 with the channels facing down.Check the “sandwich” you created for gaps along the edges. Use any additional ecoflex to fill them in.
Later I examine the cast created for gaps along the edges. Use any additional silicon mixture to fill them in.


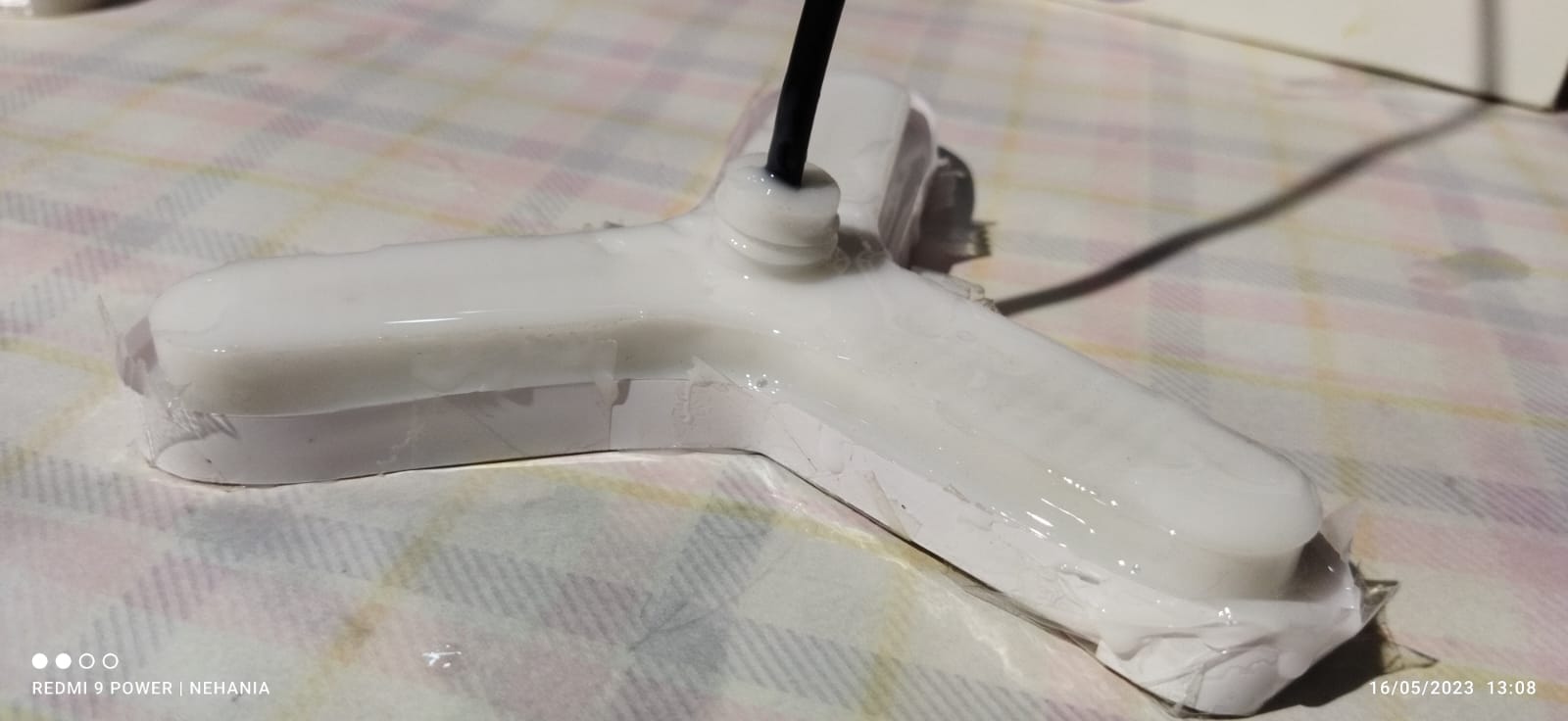
The result was good and it looks like this.
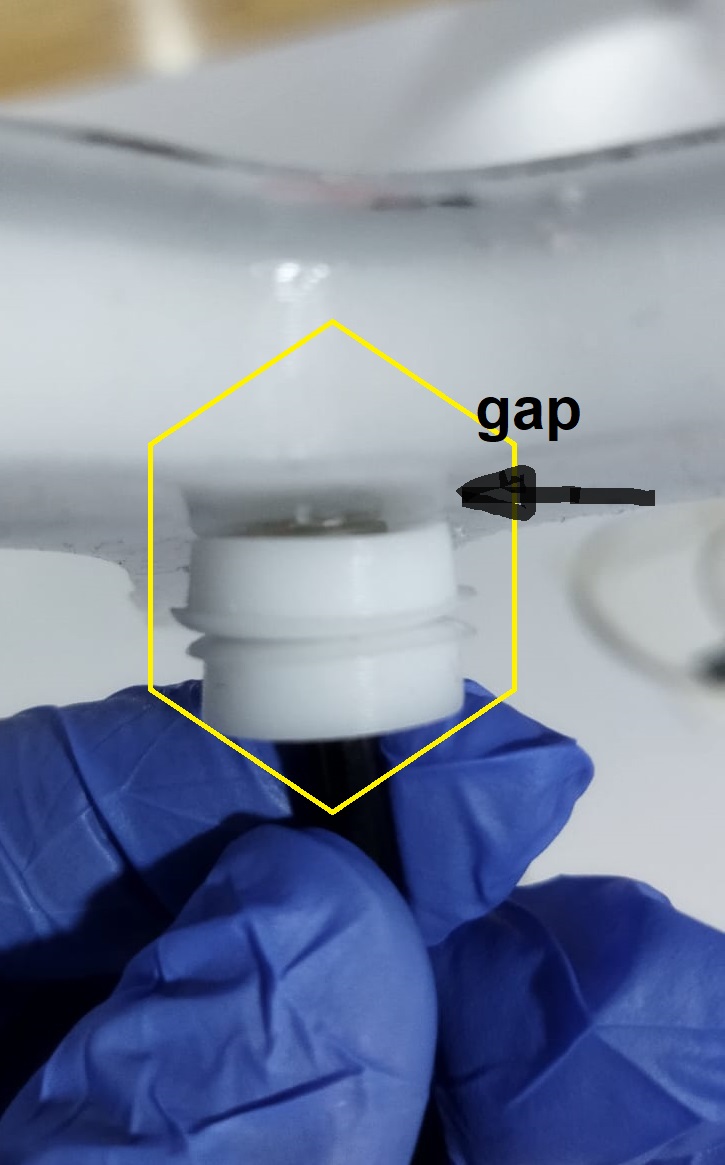
I put 2nos of washer (part 3) which I was cast earlier to seal the bard and cast joint to avoid air leakage.

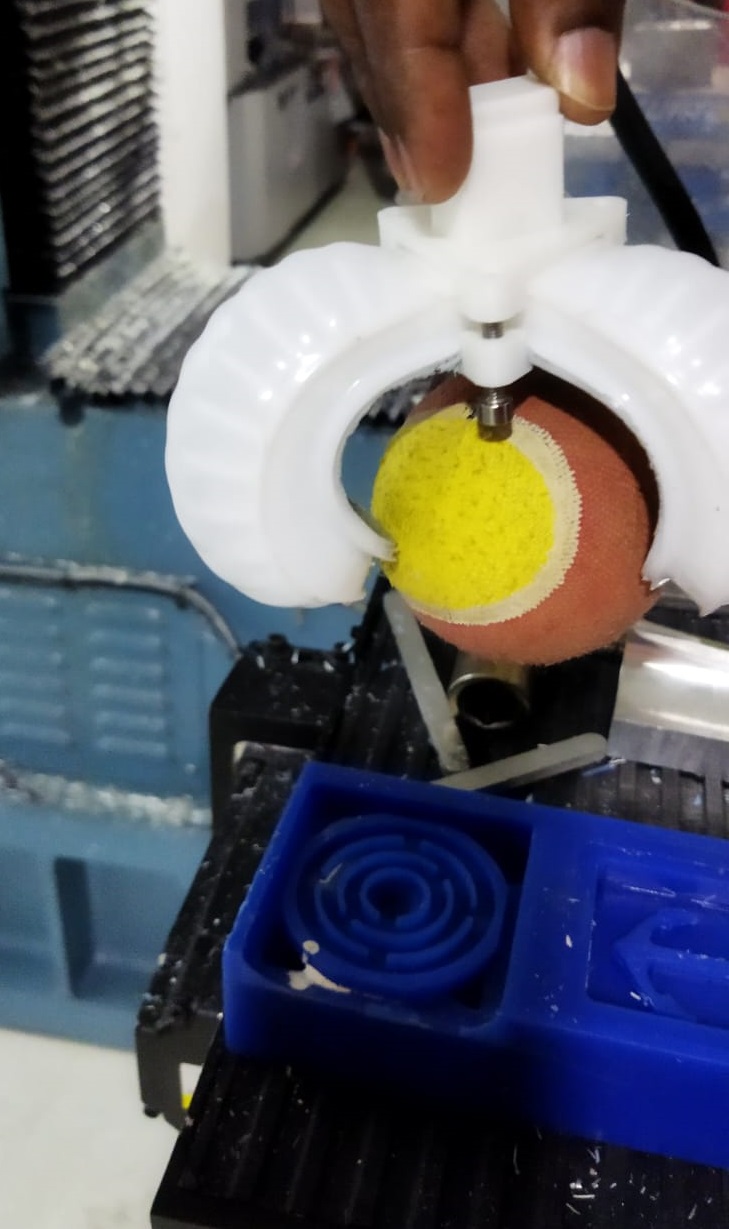
Now its time of testing…
I connect the system to the pneumatic air line of Track milling machine . Then opened the valve in a controlled manner, so that it wont brust. It works good.Even though, I applied air in a controlled manner the high air pressure (10 bar), air leaks out throught the washer joint.
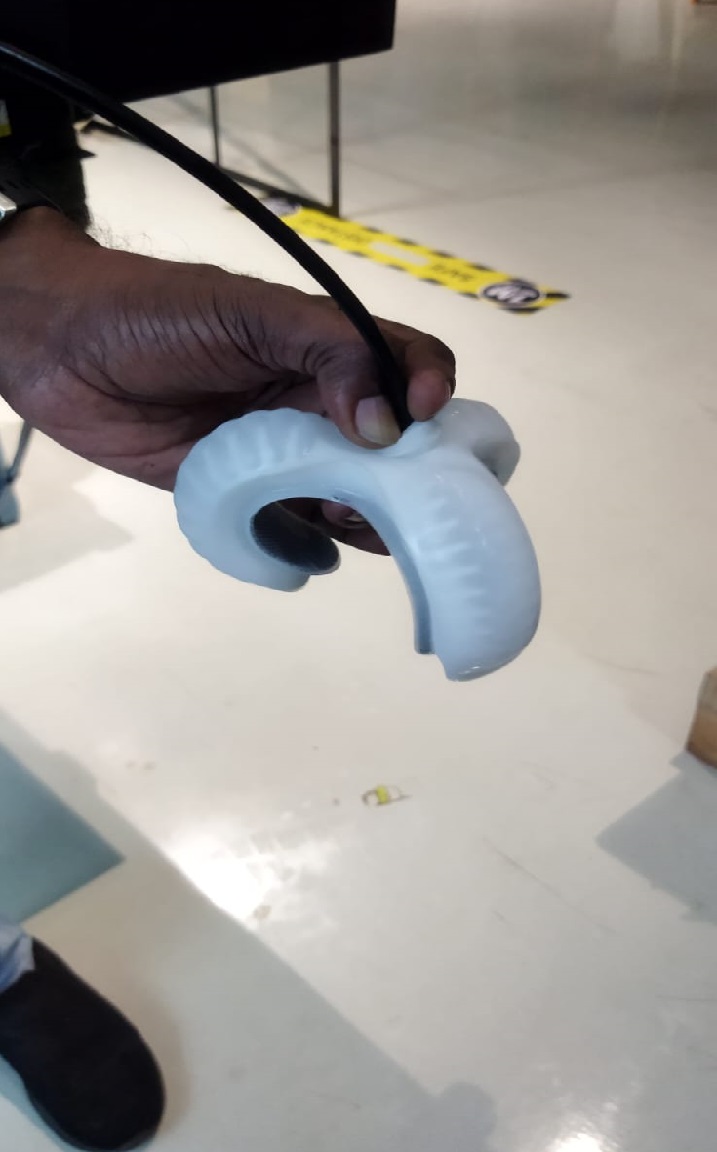
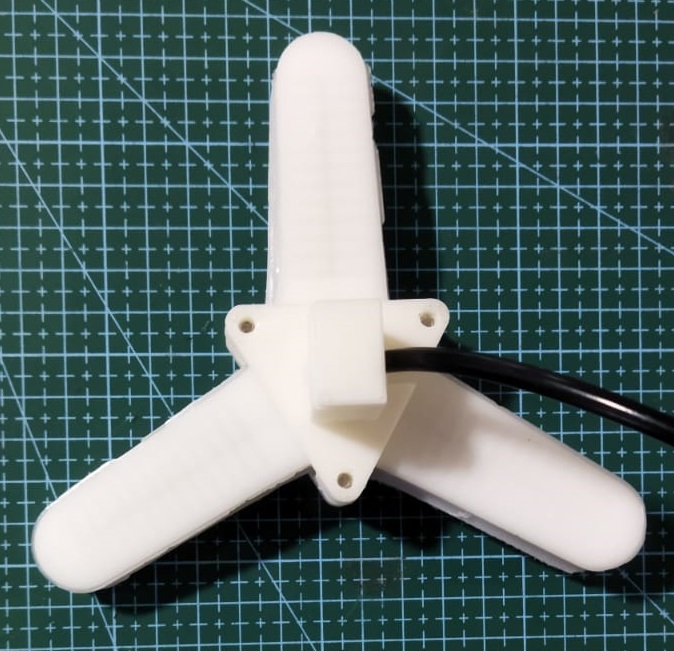
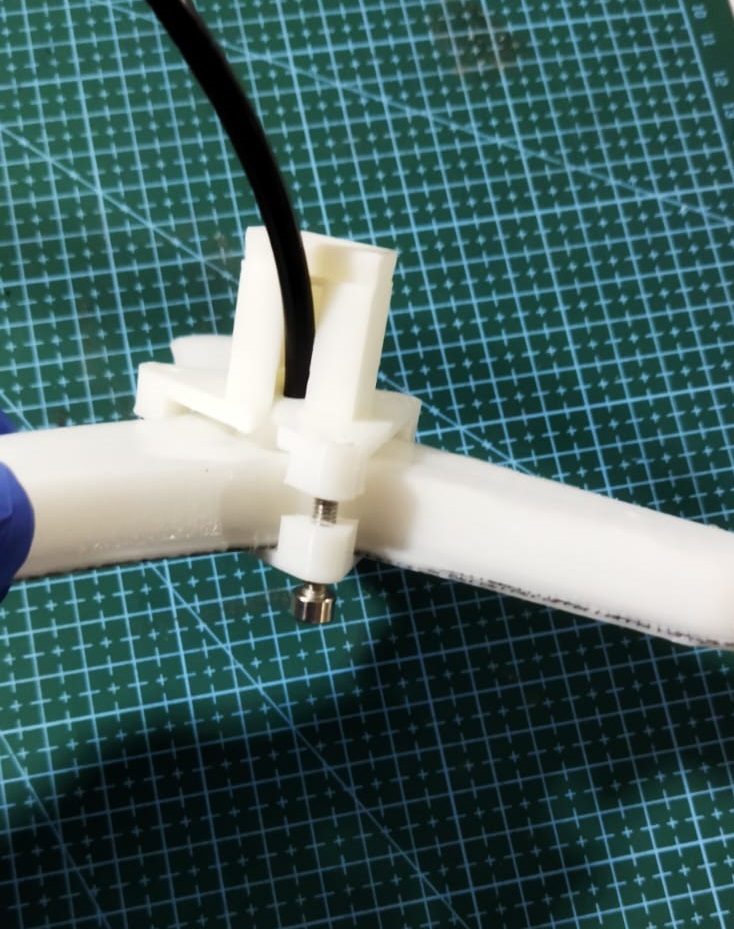
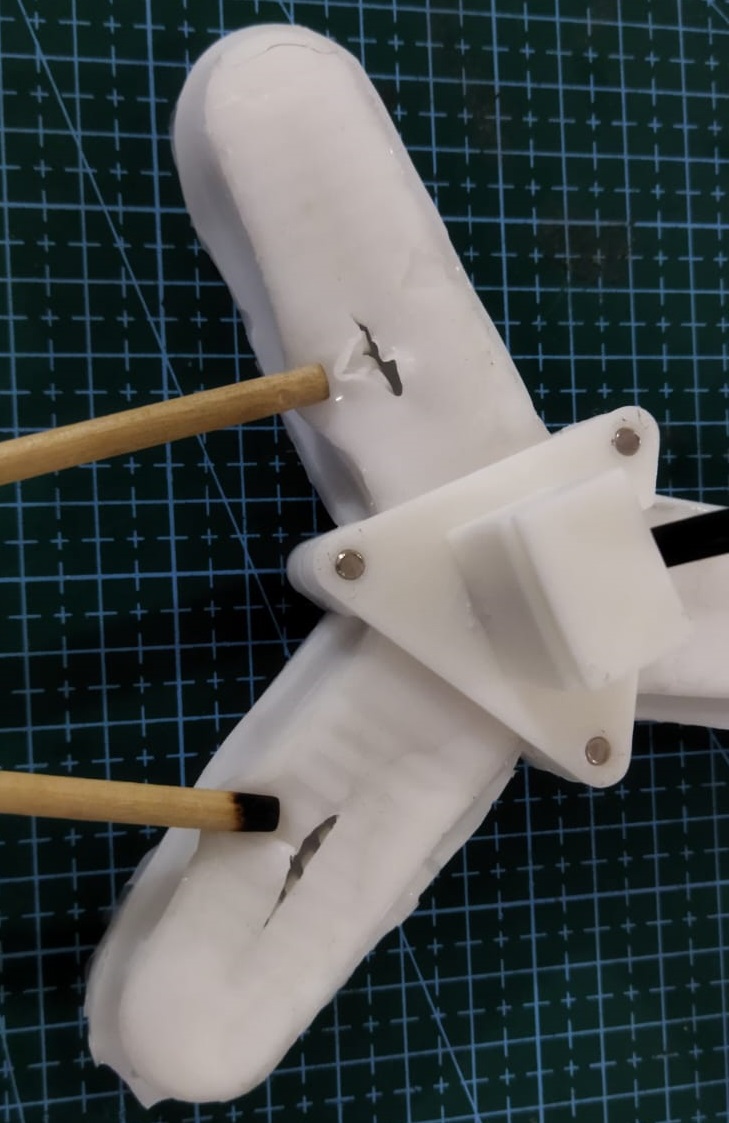
I order to hold the pneumatic tube intact, I made a holder so that top end can be inserted to arm of scara, which we were made on machine week and the back end hold the soft gripper by screws as shown.


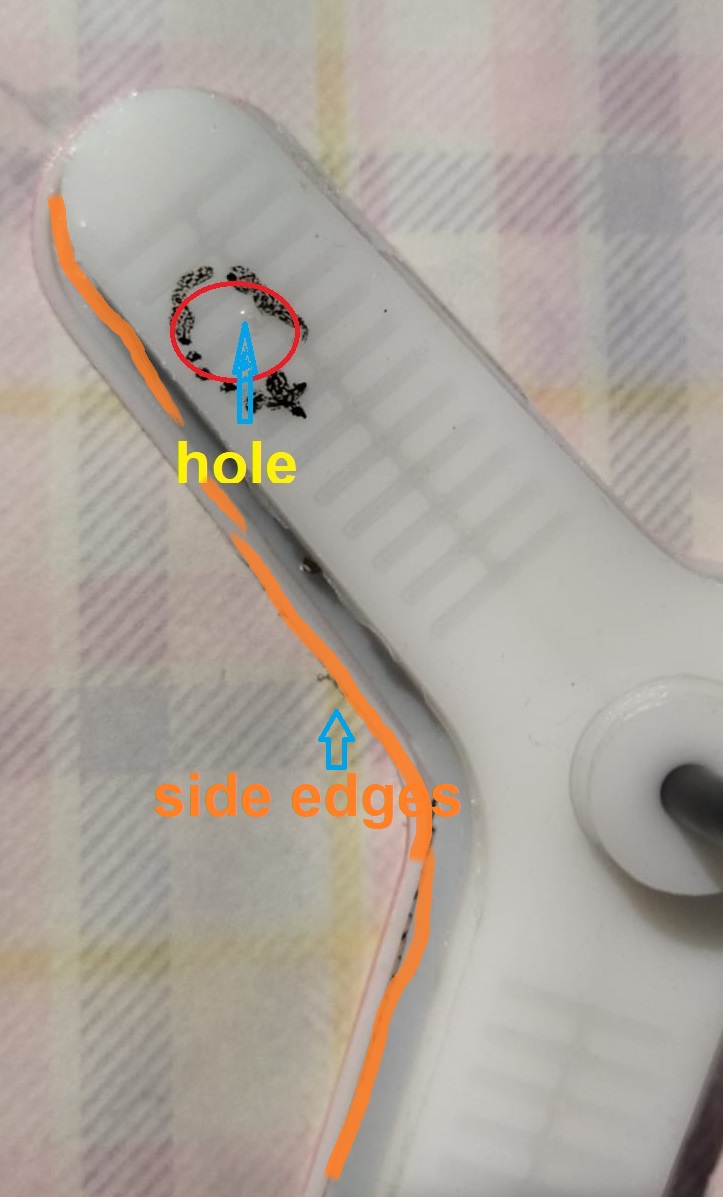
Again I tested it, this time air was leaking from one hole from top of one finger and side. this may be due to the air bubble brust which were trapped insdie the silicon mixture while pouring the slicon mixture.
I decided to patch the silicon mixture on top and side of the gripper.So I cut the extra protruded casting from the gripper, so that the cast properly sit over the top of the base(part-2)

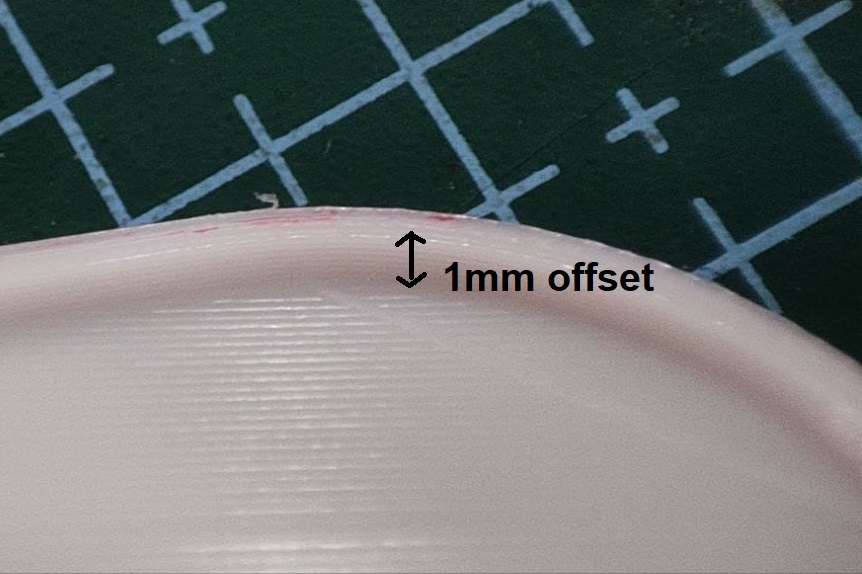
Since I provided only 1mm offset from base (part-2) to hold the silicon mixture, extra hight was made by the plastic paper and tape fixed to its sides. Again I pured the mixture.
The bottom holder was redesigned, so that the gripper finger bend more.
This time I got the better one and I conneted the gripper to the holder by using screws and tested again. This time two fingers brusted. the reason for this was, the gripper was air tight and due to this the when I operated the valve, the quantiy of air enetred was more.

Not stopping here, casted again to get a better one.This time I will try with this hand operated pump.


I am not getting enough pressure to expand the gripper. So I again took it to the track pressure line.
This time it works.