12. Output devices¶
This week I worked on defining my final project idea and started to getting used to the documentation process.
Servomotor.¶
A servomotor, also known as a servo, is a device that allows you to control the position and movements of its axis with maximum precision. This means that it can move at an angle, position and at a certain speed at all times, something that a normal electric motor cannot do. Servomotors are a system composed of electrical, mechanical and electronic parts:
Electric motor:¶
it is in charge of producing the mechanical movement through the turns of the axis.
Control system:¶
it is the electronic part of the mechanism and is in charge of controlling the movement and position of the motor by sending electrical impulses.
Regulation system:¶
it is made up of gears, which allows the torque to be increased or decreased and the motor to adopt a fixed position when required.
Potentiometer:¶
allows you to know at all times what is the position and angle in which the motor shaft is located.
Servomotors stand out for allowing great movement precision, for having very short response times and for their long useful life and robustness, all for a relatively low price.
Industrial applications of a servo motor
Servo motors are used in all robotics and industrial automation applications where extensive torque, positioning and speed control are required to improve quality and productivity. Machines such as sealers, cutters, balers, guillotines, robot arms make use of these devices to perform their functions precisely.


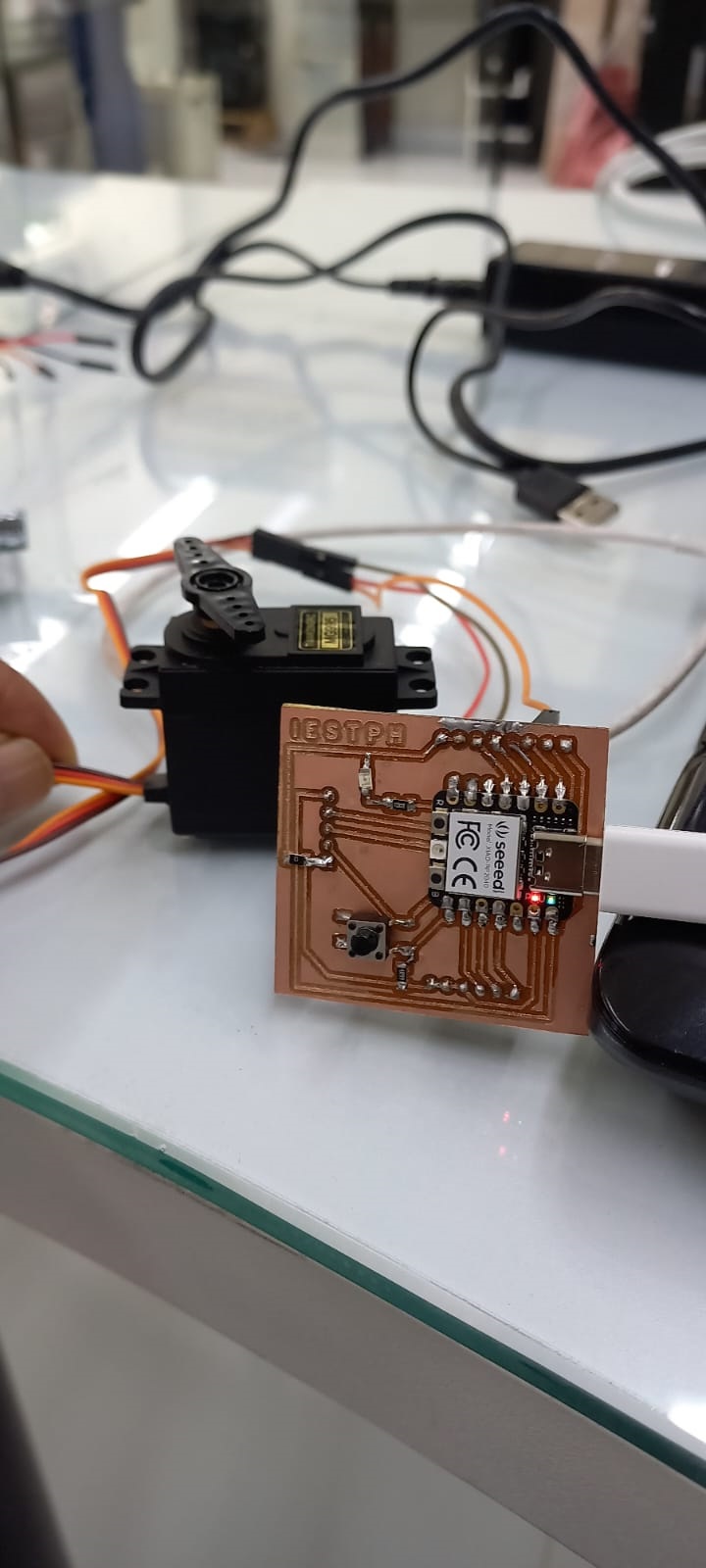
We proceed to make the connection with the Arduino to the servomotor to verify the operation, when the connection is made it is verified that I turn on the leds.
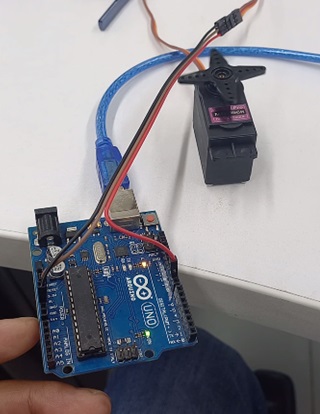
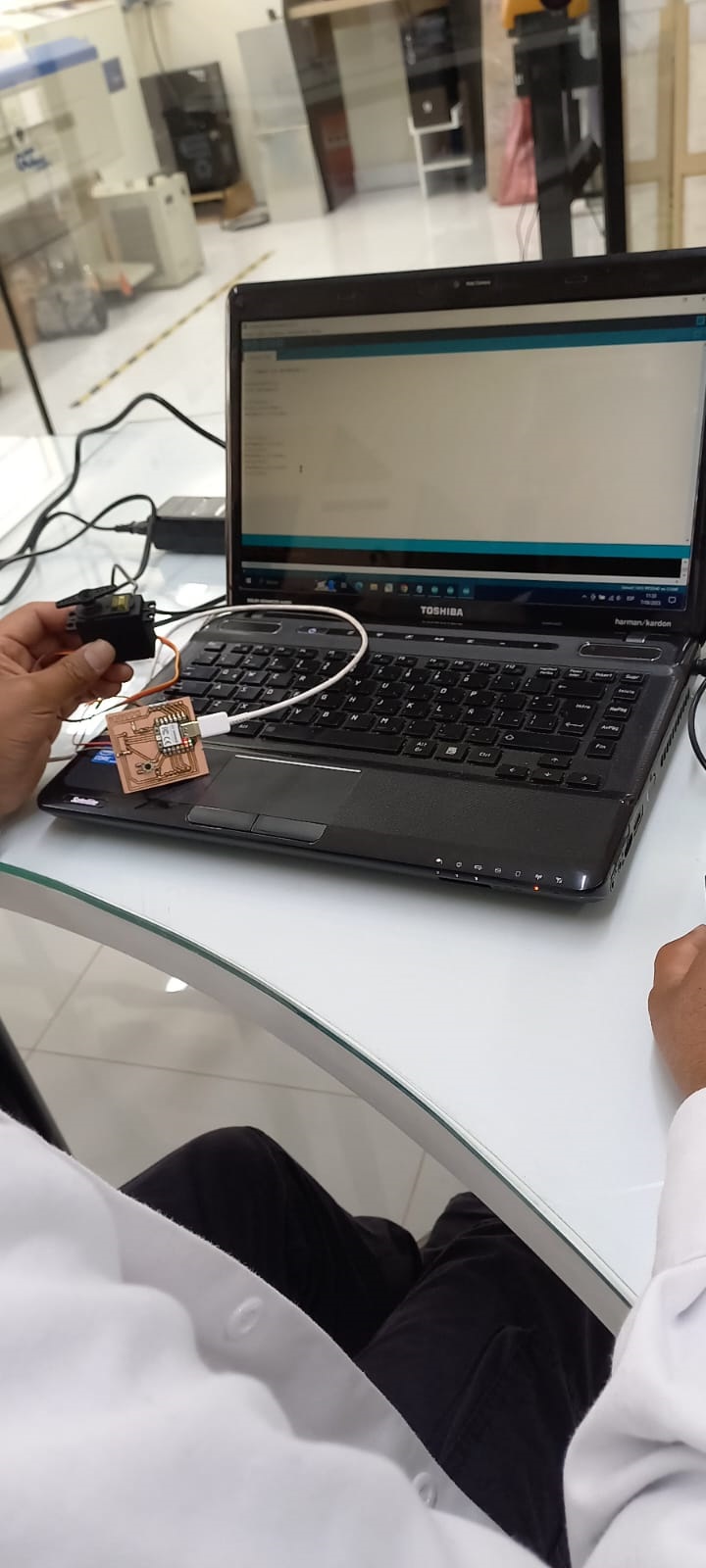
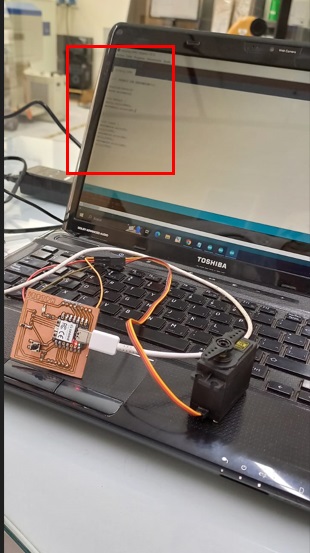
Next, we carry out the programming and compile in the Arduino to see how it works.

PROGRAMMING WITH SERVOMOTOR AND XIAO RP2040 DEVICE.¶

It has been programmed with a servomotor to verify the movement and rotation from 90° to 180° with the XIAO RP2040 device in the Arduino software, the movement is observed in the reading of the movement of the device.