1. Initial Project Description¶
Description¶
Inspiration¶
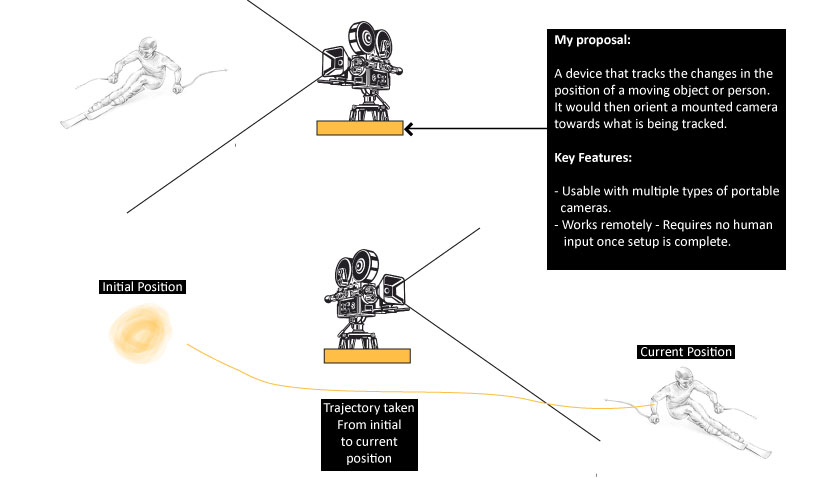
I enjoy outdoor sports, alpine skiing mainly. Having myself recorded has been instrumental in improving my technique and documenting specific events/excursions. However, It is not always practical, ideal or possible to have someone film another person. I have therefore decided to design and manufacture a device that could be placed in a remote location from which it would film a moving object.
Concept¶
Standalone device that orients a camera towards a target by tracking the target’s relative position. This device would be used to remotely film objects or individuals in movement and can be useful in documenting outdoor activities with little to no human input.
The device would act as a camera mount. Users would place in a remote location from which the device woule changes in position of a specified object and orient a camera towards that object.
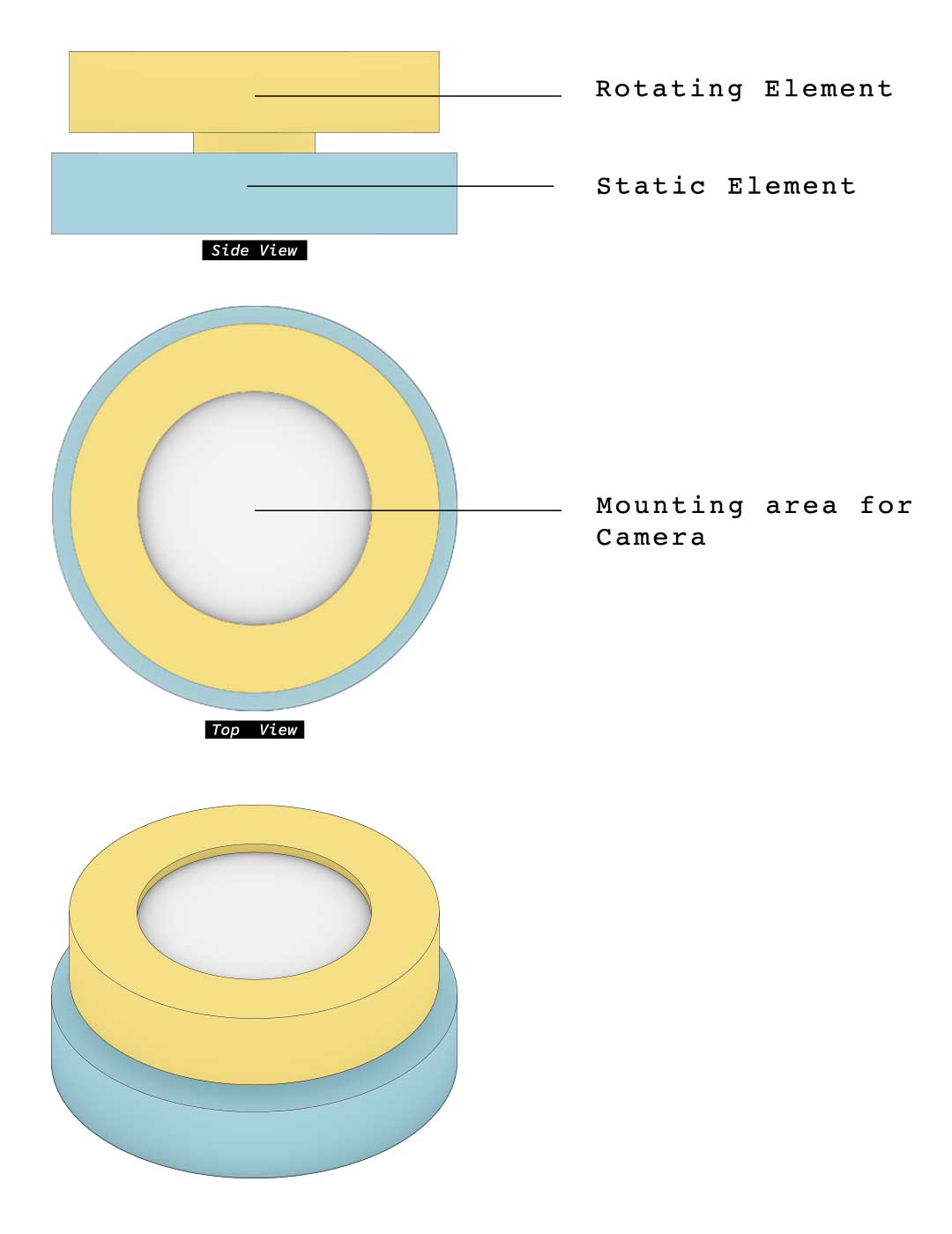
Below is simplified concept model of what I hope to fabricate. The body of the device consists of two elements. One is static
Concept Render¶
Pan System¶
The below render depicts how I currently believe the Pan only device could look like. Two cylindrical bodies one atop the other. One is static, holding all the electrical components. The other rotates about its center and is the platform on which cameras will be mounted.
Goals¶
Essential Features - What I aim to achieve during fabacademy
- Tracks the relative position of one moving object.
- Orients a mounted device towards the moving object.
- Usable with at least one type of portable camera.
Extended Features - What I hope to achieve in the future if I were to keep developing the device
- Rotates about 2 axes (Pitch, Roll)
- Self Levels - Does not require to be placed on a flat surface.
- Tracks at a distance greater than 500 meters
- Collaborative project - Allow others to improve parts of the project and develop accessories for specific applications.
- Switch between different trackers
- Works with multiple types of cameras.
FabAcademy Q&A¶
16. Applications & Implications¶
What will it do?
Continously track a moving object to orient a camera towards it. Tracking will be hardware based, allowing the device to be used with multiple types of cameras.
Who has done what beforehand?
Inspiration - Turntable / Pan Mechanism
Oleksandr Romanko designed a Pan mechanism for a similar type of project (see his week09 Assignment show below). I plan on using his design as inspiration to developing my own.
Inspiration - Existing Products
In terms of existing products, I have found three that offer what I am aiming to achieve.
| Products | Description | Price |
|---|---|---|
| Pixio/Pixem | Considered the best in class of Auto tracking devices. Works indoors and outdoors | $800.00 |
| Pivo | Proprietary tracking software installed on smartphone - tracks pixels using phone’s camera | $134.00 |
| Soloshot | Outdoors only - can from up to 600 meters | $899.00 |
What will I design?
Base pan mechanism
Manual Control Mechanism of base system
GPS Positioning and Pointing System
Wireless Communication system between tracker and base unit
What materials and components will be used? How much will they cost?
| Materials | Description | Components | Description |
|---|---|---|---|
Acrylic |
Device’s components (Gears, Bearings, Mounts) and enclosure | Magnetometer |
Absolute Orientation Detection |
3d Printable Plastic |
Device’s components and enclosure | WiFi Module |
Wireless Communications |
Stainless Steel |
Bearing Balls | Stepper Motor |
Motion |
Where will they come from? How much will they cost?
The below table lists the components I have already selected for my project. It does not represent the complete BoM as it solely tries to answer the question at the project’s current state (as of the 18/05/2021).
| Component | Origin | Cost per Unit (in euros) |
|---|---|---|
GPS + Magnetometer Module |
Amazon - Purchase Link | 37,98 |
Bearing Balls - 6mm - 200 units |
AliBaba - Purchase Link | 5.99 |
What parts and systems will be made?
1 |
All electronic circuits |
2 |
A custom Thrust Bearing from milled sheets of acrylic |
| ‘3’ | A custom belt drive mechanism |
| ‘4’ | 3D printed structure and housing |
What processes will be used?
CNC Milling - For the acrylic components used in the thrust bearing.
3D Printing (FDM) - for the core structure and housing of electronic components.
What questions need to be answered?
1 |
What type of Bearing would be optimal for this system ? |
2 |
What Gear combination should I use ? |
3 |
Will using a single ESP module to host a server and a network affect the performance and speed of the system ? |
| ‘4’ | What will the device do when it looses connection to the target ? |
| ‘5’ | How to design a mechanism that emits little to no noise ? |
How will it be evaluated?
N |
Criteria |
1 |
System provides a smooth pan motion that can be controlled manually |
2 |
System tracks* a moving object through GPS |
3 |
System points towards object being tracked |
Planning¶
Spirals¶

| Description | Features | |
|---|---|---|
| A pan only system that can be operated manually | Closed System; Smooth motion; Wireless remote control unit; Battery for outdoor usage; | |
| A pan only system with automatic tracking through low accuracy outdoor positioning tech | GPS tracking; Tracking achieved with separate, wireless, portable device; Self position and orientation awareness; | |
| A pan only system with automatic tracking through indoor positioning tech | low accuracy indoor positioning system technology (BLE); | |
| A pan only system with automatic tracking through indoor and outdoor positioning tech | System able to switch between both automatically; | |
| A pan-tilt system with automatic tracking through indoor and outdoor positioning tech | pan and tilt; system able to track changes in all directions; |
Each spiral builds upon the previous one. All the features available in one should be available in the next.
What needs to be done¶
Phase 1
-
Motors
- a. Select the type of motor I want to use.
- b. Determine how to produce a smooth motion
-
Wireless communication
- a. Determine the most effective wireless communication technology that could allow a moving object to communicate with a static one.
- b. Determine how to send data through wireless communication.
- c. Determine how to issue commands through wireless communication.
-
Battery Power
- a. Powering all elements with batteries to allow for portability.
-
Design
- a. Design a fully enclosed, controllable, camera pan system.
- b. Design a fully enclosed remote control unit.
Phase 2
-
GPS localisation
- a. Understand how to obtain and interpret GPS data. Namely, what influences the effectiveness of a GPS module and how to make sense of the data.
- b. Determine how to use GPS module to derive the position of elements relative to others (differential positioning).
-
Orientation awareness
- a. Design a system that would allow the device to determine its orientation.
-
Design
- a. Design a portable device whose GPS can be tracked and communicated OTA to the base system.