Week 17.Machine Design
Group work:
The main objectives are to
- actuate and automate our machine
- document the group project and our individual contribution
Details of the group assignment are on the group page.
Individual contribution
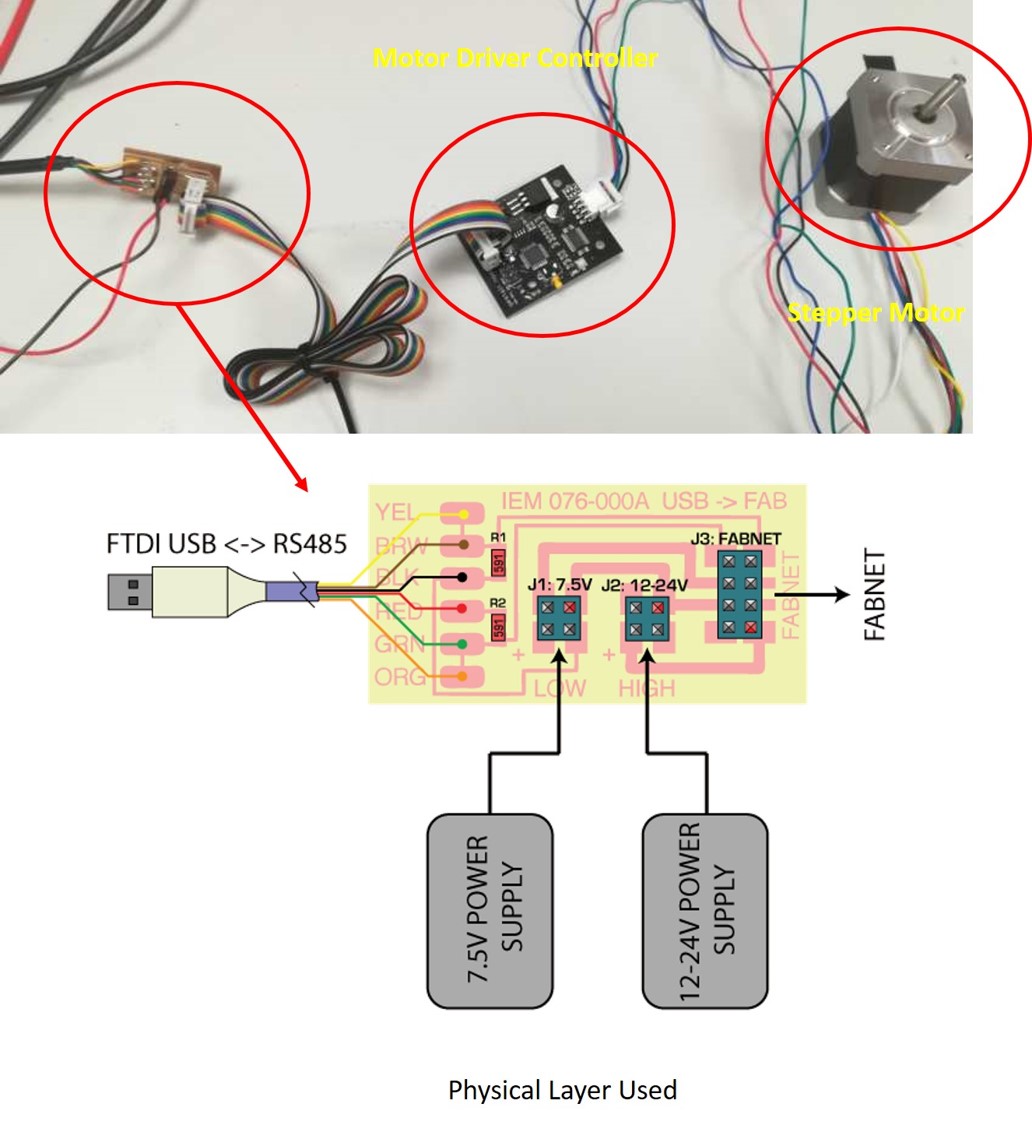
Now the robot was build and all Gestalt nodes were connected to the motors and after installing Pyserial and the 'pygestalt' module I was able to program the gestalt module.
I used the examples/machines/htmaa/singlenode.py in gestalt module repository as the base code and edited it to work with three nodes.
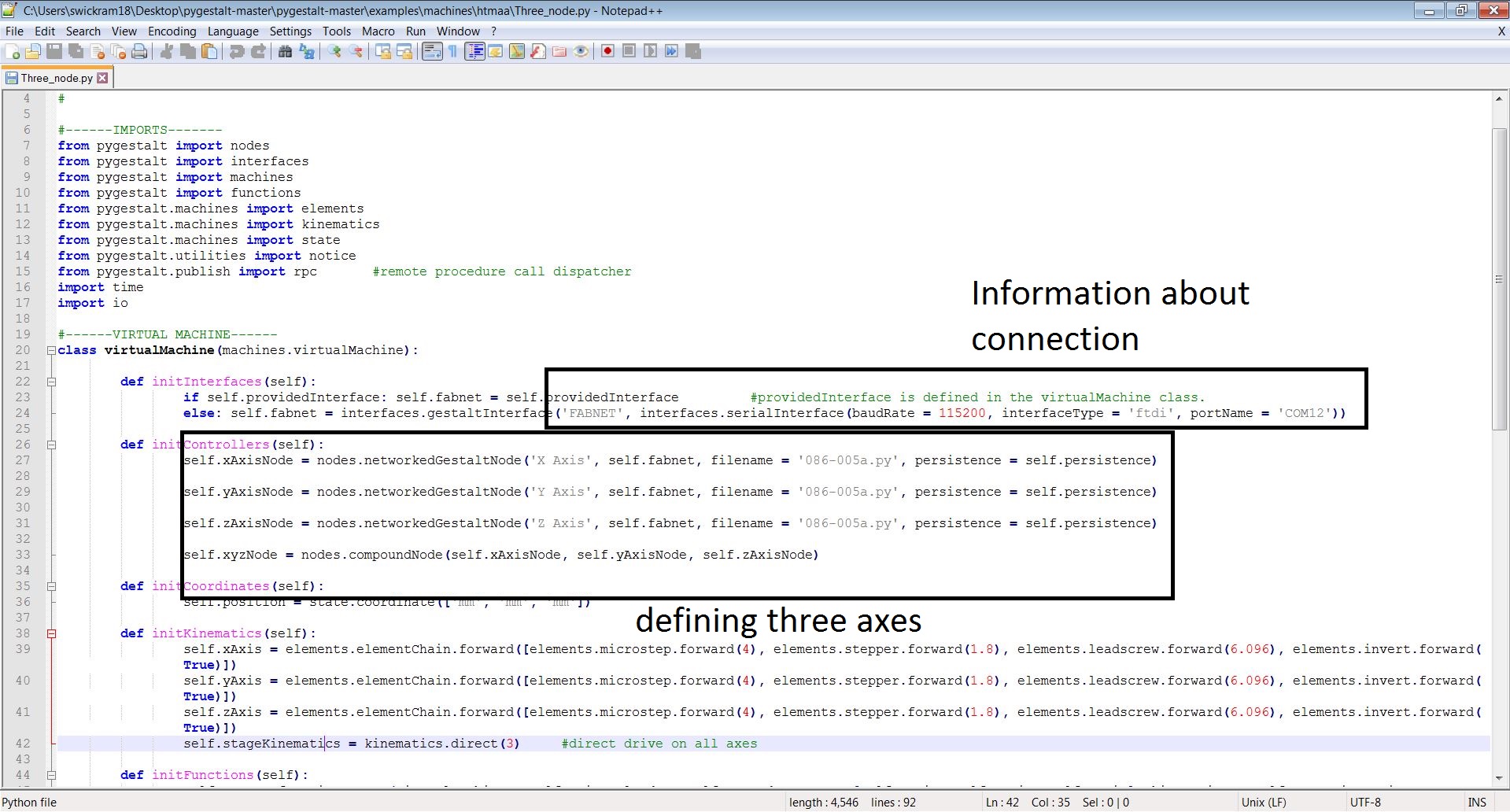
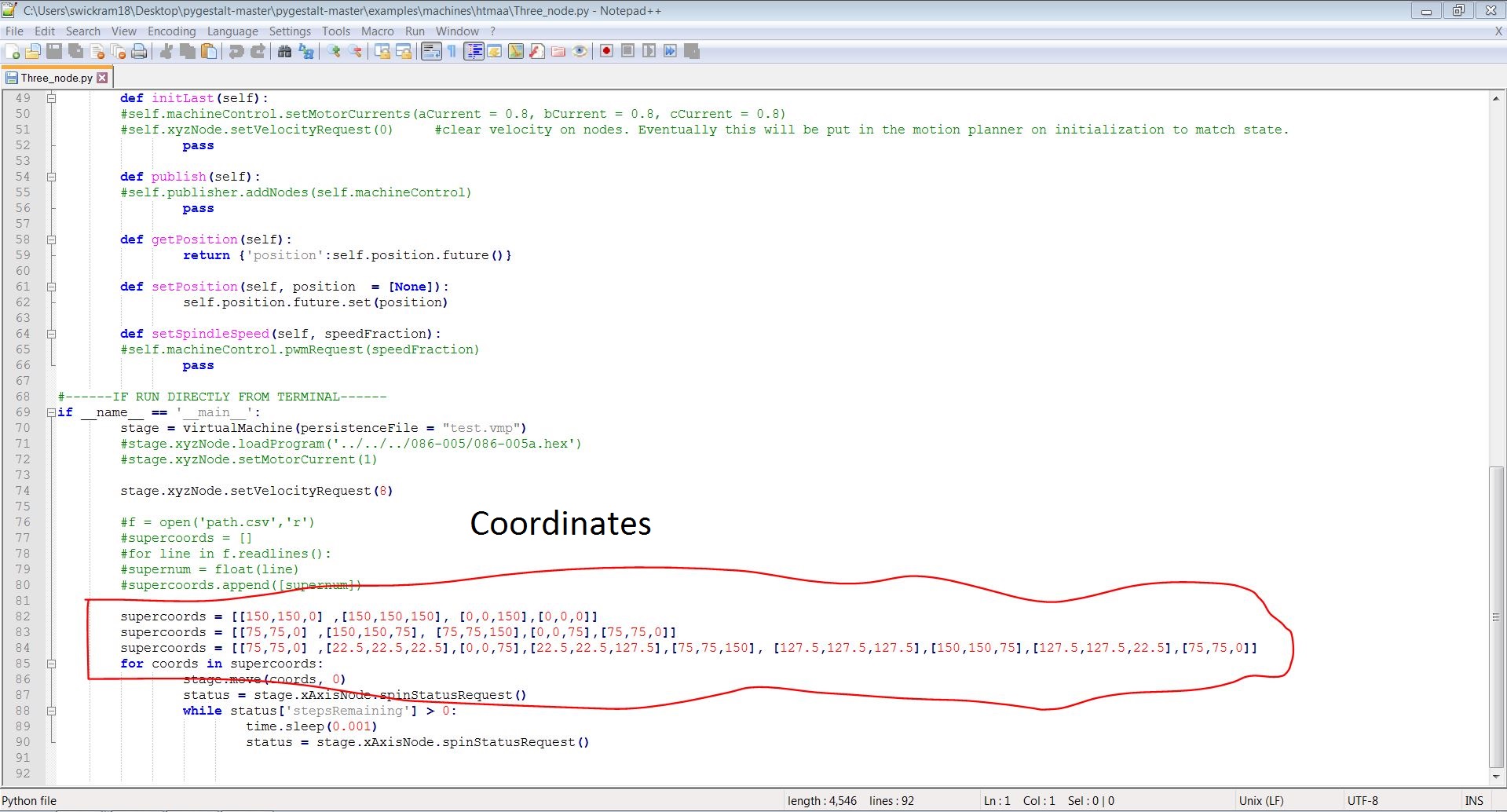
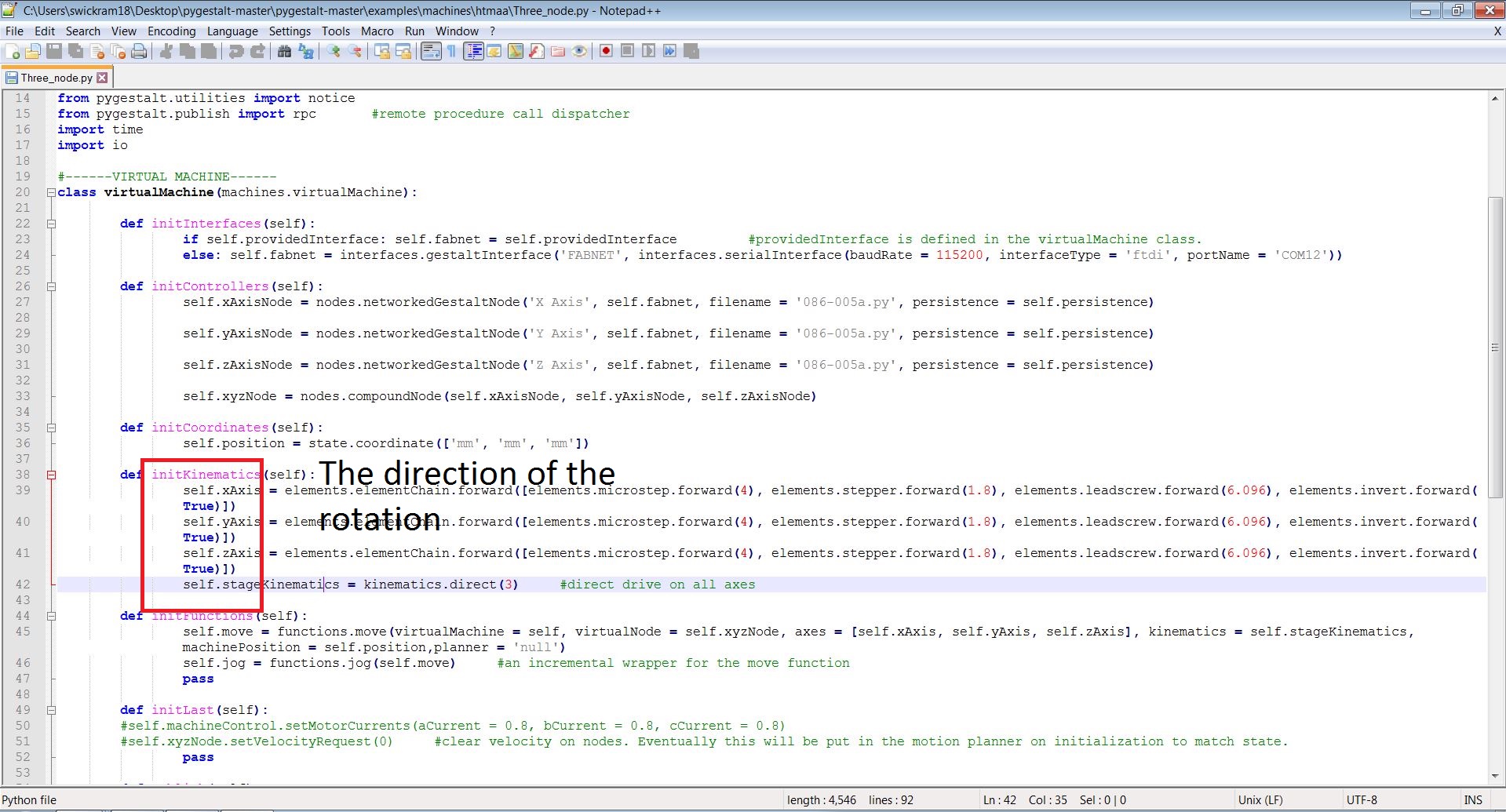
I defined three axes as x,y, and z. Then I created the coordinates which the axes should travel. Here x and y axis have the same coordinates as they should travel together. There are different coordiates for different shapes shown above.
A rectangle and a trapezium was easy to get coordinates.