Final Project: A Cat Friendly Bench.
All documentation related to the final project is distributed among these htlml pages:- A short presentation of my final project (Click here)
- All documentation of the final project production:
- Final project CNC Machining (Click here):
- Final project electronics design and production: Fabduino + Handmade Led Stripe (We are here)
- Final project composite: A half of an X tube (Click here)
** CNC Machining (I) DM: A cat friendly bench (Click here)
**CNC Machining (II) FOAM: An X tube mold (Click here)
Final Project: A Cat Friendly Bench. Electronics design and production.
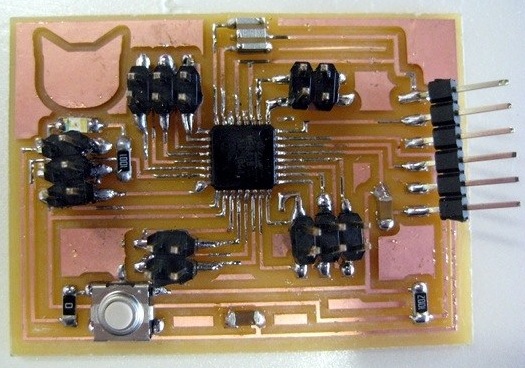
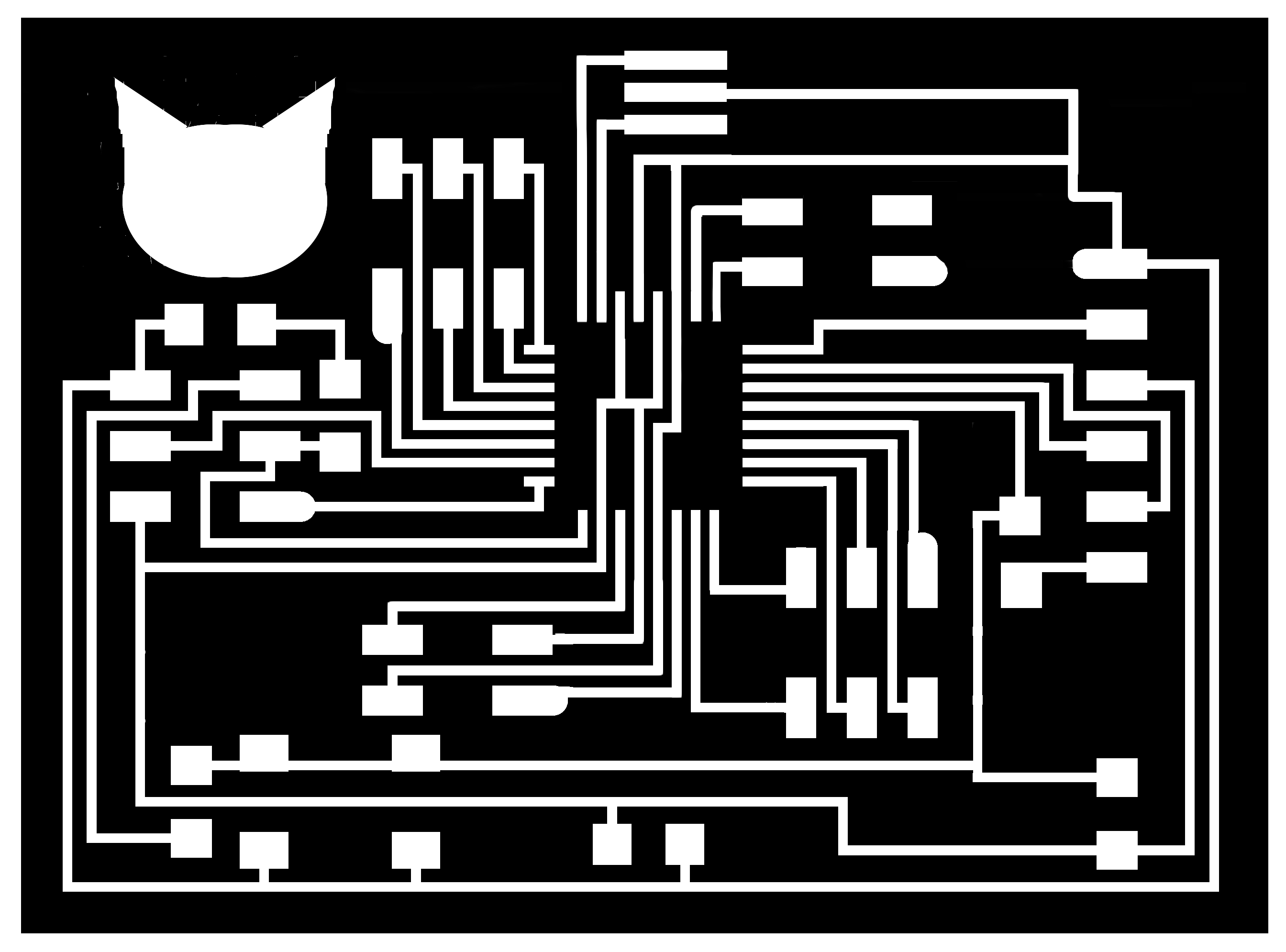
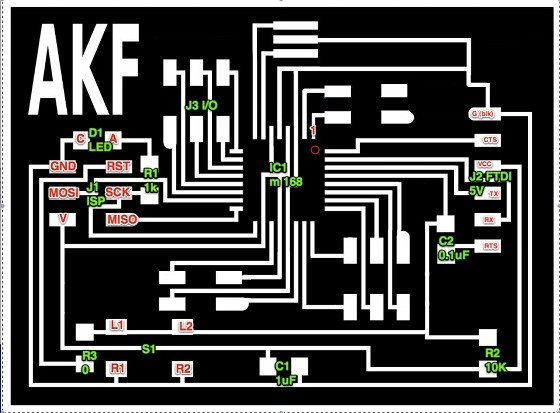
1. Fabduino ATmega168A 16MHz:
1.1. Fabduino ATmega168A 16MHz Electronics design and production files:
{kind=link}
{kind=link}
1.2. Fabduino description:
* Fabduino ATmega168A 16MHz Components:
- S1 Switch
- ATmega168A
- XTAl 16MHz
- C1 1uF
- C2 0,1 uF
- R1 1k
- R2 10k
- R3 0k
- 3 header ISP (6 pins)
- 2 header ISP (4 pins)
- FTDI connector
- D1 Led
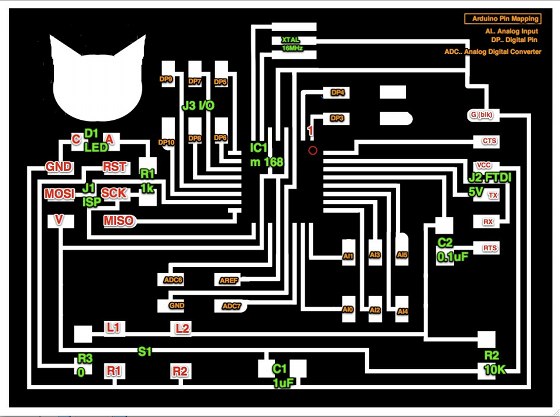
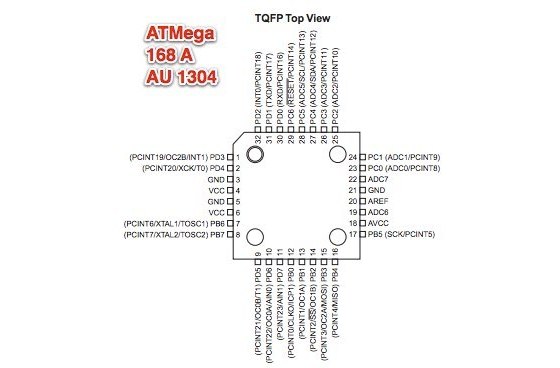
* Fabduino ATmega168A 16MHz Pin Mapping.
From this image of Anna's fabduino I have prepared the Pin Mapping of the Fabduino following this ATMega 168 Arduino Pin Mapping published at arduino.cc website.
{kind=link}
1.3. Fabduino Programming:
I followed Anna's tutorial hello arduino and programmed the board with out any problem.

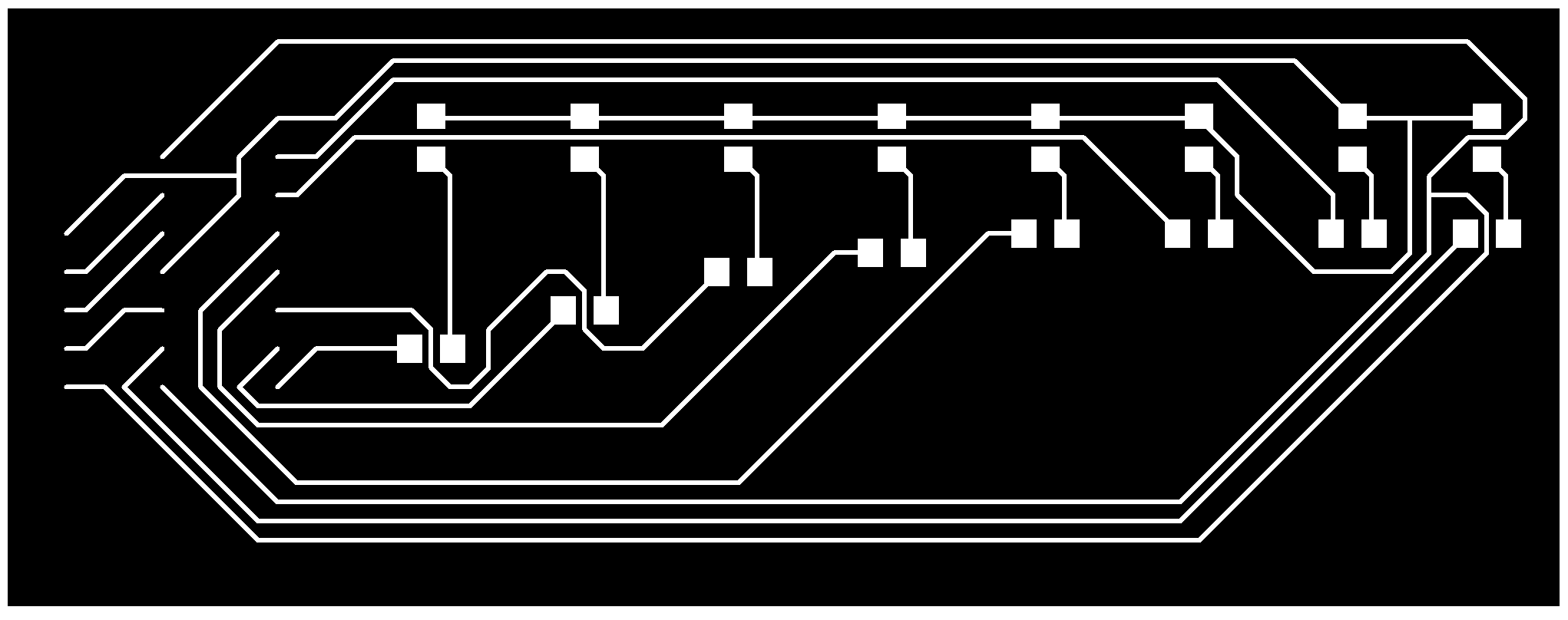
2. Handmade Led Stripe:
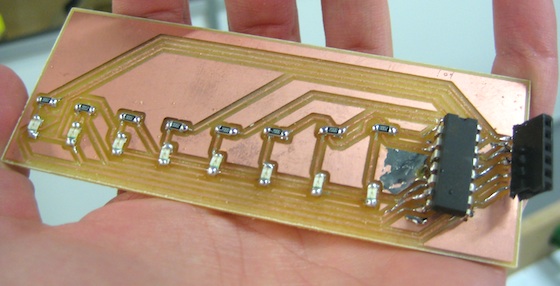 Handmade Led Stripe with 74HC595 8 bit shift register
Handmade Led Stripe with 74HC595 8 bit shift register
2.1. How to make a Handmade Led Stripe. Some research:
I want leds to simulate movement. There are several solutions for it. Below there are some of these solutions described:
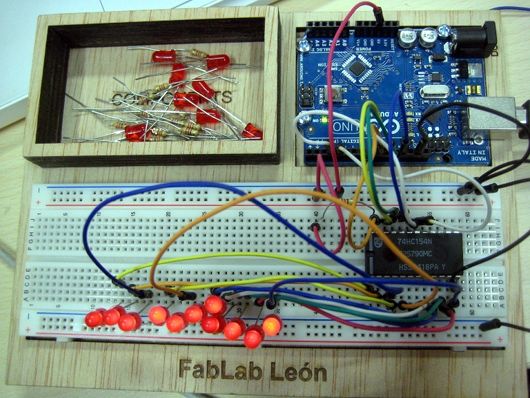
* Demultiplexer 74HCT154N. 4-16 outputs.
I read about Some Multiplexer/Demultiplexer here; and started making tests with an arduino board and a protoboard:
 74HCT154N Datasheet
74HCT154N Datasheet
/*
Blink
Turns on an LED on for one second, then off for one second, repeatedly.
This example code is in the public domain.
*/
void setup() {
// initialize the digital pin as an output.
// Pin 13 has an LED connected on most Arduino boards:
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(3, OUTPUT);
digitalWrite(3, LOW);
pinMode(4, OUTPUT);
digitalWrite(4, LOW);
}
void loop() {
digitalWrite(9, LOW); // set the LED on
digitalWrite(10, LOW); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, HIGH); // set the LED on
digitalWrite(10, LOW); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, LOW); // set the LED on
digitalWrite(10, HIGH); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, HIGH); // set the LED on
digitalWrite(10, HIGH); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, LOW); // set the LED on
digitalWrite(10, LOW); // set the LED off
digitalWrite(11, HIGH); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, HIGH); // set the LED on
digitalWrite(10, LOW); // set the LED off
digitalWrite(11, HIGH); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, LOW); // set the LED on
digitalWrite(10, HIGH); // set the LED off
digitalWrite(11, HIGH); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, HIGH); // set the LED on
digitalWrite(10, HIGH); // set the LED off
digitalWrite(11, HIGH); // set the LED off
digitalWrite(12, LOW); // set the LED off
delay(300); // wait for a second
digitalWrite(9, LOW); // set the LED on
digitalWrite(10, LOW); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, HIGH); // set the LED off
delay(300); // wait for a second
digitalWrite(9, HIGH); // set the LED on
digitalWrite(10, LOW); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, HIGH); // set the LED off
delay(300); // wait for a second
digitalWrite(9, LOW); // set the LED on
digitalWrite(10, HIGH); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, HIGH); // set the LED off
delay(300); // wait for a second
digitalWrite(9, HIGH); // set the LED on
digitalWrite(10, HIGH); // set the LED off
digitalWrite(11, LOW); // set the LED off
digitalWrite(12, HIGH); // set the LED off
delay(300);
}
*74HC595 8 bit shift register. This is the one I am finally using.
It lets expand on the digital outputs we have on our mictrocontroller. Each one of these 74HC595s can act like 8 more digital outputs. All info: http://bildr.org/2011/02/74hc595/ and 74HC595 datasheet here
.
int SER_Pin = 8; //pin 14 on the 75HC595
int RCLK_Pin = 9; //pin 12 on the 75HC595
int SRCLK_Pin = 10; //pin 11 on the 75HC595
//How many of the shift registers - change this
#define number_of_74hc595s 1
//do not touch
#define numOfRegisterPins number_of_74hc595s * 8
boolean registers[numOfRegisterPins];
void setup(){
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
//reset all register pins
clearRegisters();
writeRegisters();
}
//set all register pins to LOW
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
//Set and display registers
//Only call AFTER all values are set how you would like (slow otherwise)
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
void loop(){
setRegisterPin(1, HIGH);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, HIGH);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, HIGH);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, HIGH);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, HIGH);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, HIGH);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, HIGH);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
//MUST BE CALLED TO DISPLAY CHANGES
//Only call once after the values are set how you need.
}
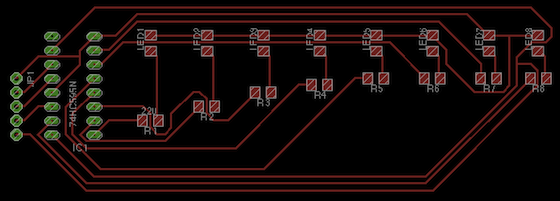
Once everything works on the arduino board I made the final design on Eagle.
2.2. Handmade Led Stripe Electronics design and production files:
{kind=link}
{kind=link}
3. Ultrasonic Sensor
Utrasonic sensor HC - SR04. Datasheet: http://users.ece.utexas.edu/~valvano/Datasheets/HCSR04b.pdf
Code distance:
/*
HC-SR04 Ping distance sensor]
VCC to arduino 5v GND to arduino GND
Echo to Arduino pin 13 Trig to Arduino pin 12
More info at: http://goo.gl/kJ8Gl
*/
#define trigPin 5
#define echoPin 4
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
int duration, distance;
digitalWrite(trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance >= 200 || distance <= 0){
Serial.println("Out of range");
}
else {
Serial.print(distance);
Serial.println(" cm");
}
delay(500);
}
Other interesting links: http://arduinobasics.blogspot.com.es/2012/11/arduinobasics-hc-sr04-ultrasonic-sensor.html
http://trollmaker.com/article3/arduino-and-hc-sr04-ultrasonic-sensor
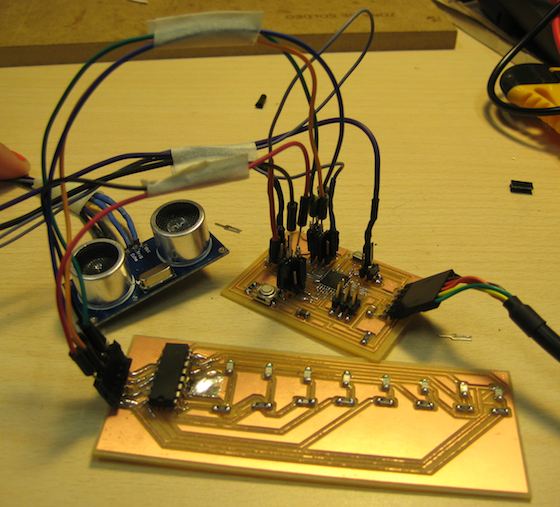
4. Everything working together: ultrasonic sensor + handmade led stripe
4.1 First test. I tested everything together on the arduino board, to test the code and all the integration of components.
/*
27 mayo 2013 Fab Academy Fab Lab Leon
This code is a mix between:
* HC-SR04 Ping distance sensor]
VCC to arduino 5v GND to arduino GND
Echo to Arduino pin 13 Trig to Arduino pin 12
More info at: http://goo.gl/kJ8Gl
* An example of the 74HC595 8 bit shift register that has been found here http://bildr.org/2011/02/74hc595/
*/
//ultrasonic sensor pins
#define trigPin 5
#define echoPin 4
//74HC595 Pins that connects to Arduino
int SER_Pin = 8; //pin 14 on the 75HC595
int RCLK_Pin = 9; //pin 12 on the 75HC595
int SRCLK_Pin = 10; //pin 11 on the 75HC595
//How many of the shift registers - change this
#define number_of_74hc595s 1
//do not touch
#define numOfRegisterPins number_of_74hc595s * 8
boolean registers[numOfRegisterPins];
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
//reset all register pins 74hc595
clearRegisters();
writeRegisters();
}
//set all register pins to LOW
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
//Set and display registers
//Only call AFTER all values are set how you would like (slow otherwise)
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
void loop() {
int duration, distance;
digitalWrite(trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance <20 ) {
// when the cat gets into the house/tube leds start lighting
setRegisterPin(1, HIGH);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, HIGH);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, HIGH);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, HIGH);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, HIGH);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, HIGH);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, HIGH);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
}
if (distance >= 200 || distance <= 0){
Serial.println("Out of range");
}
else {
Serial.print(distance);
Serial.println(" cm");
delay(500);
}
}
4.2. Finally I used my own fabduino and the handmade led stripe:
/*
27 mayo 2013 Fab Academy Fab Lab Leon
This code is a mix between:
* HC-SR04 Ping distance sensor]
VCC to arduino 5v GND to arduino GND
Echo to Arduino pin 13 Trig to Arduino pin 12
More info at: http://goo.gl/kJ8Gl
* An example of the 74HC595 8 bit shift register that has been found here http://bildr.org/2011/02/74hc595/
*/
//ultrasonic sensor pins
#define trigPin 5
#define echoPin 4
//74HC595 Pins that connects to Arduino
int SER_Pin = 8; //pin 14 on the 75HC595
int RCLK_Pin = 9; //pin 12 on the 75HC595
int SRCLK_Pin = 10; //pin 11 on the 75HC595
//How many of the shift registers - change this
#define number_of_74hc595s 1
//do not touch
#define numOfRegisterPins number_of_74hc595s * 8
boolean registers[numOfRegisterPins];
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
//reset all register pins 74hc595
clearRegisters();
writeRegisters();
}
//set all register pins to LOW
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
//Set and display registers
//Only call AFTER all values are set how you would like (slow otherwise)
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
void loop() {
int duration, distance;
digitalWrite(trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance <20 ) {
// when the cat gets into the house/tube leds start lighting
setRegisterPin(1, HIGH);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, HIGH);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, HIGH);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, HIGH);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, HIGH);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, HIGH);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, HIGH);
writeRegisters();
delay (100);
setRegisterPin(1, LOW);
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
setRegisterPin(6, LOW);
setRegisterPin(7, LOW);
writeRegisters();
delay (100);
}
if (distance >= 200 || distance <= 0){
Serial.println("Out of range");
}
else {
Serial.print(distance);
Serial.println(" cm");
delay(500);
}
}