11. Networking¶
Objectives of the Week¶
- Demonstrate workflows used in network design
- Implement and interpret networking protocols and/or communication protocols
Schedule¶
Wednesday, April 1st - Networking
Thursday, April 2nd : Wired Connections
Tuesday, April 7th : Non-wired Connections
Assingments¶
Group assignment:¶
- Send a message between two projects Link to group page
- Document your work to the group work page and reflect on your individual page what you learned
Individual assignment:¶
- design, build and connect wired or wireless node(s) with network or bus addresses and a local input and/or output device(s)
Learnings¶
As part of the group assignment we learned about various communication protocol.
Serial Link to group page
I2C
I2C is typicall used for communicating between sensors and micro processor or between microprocessors.
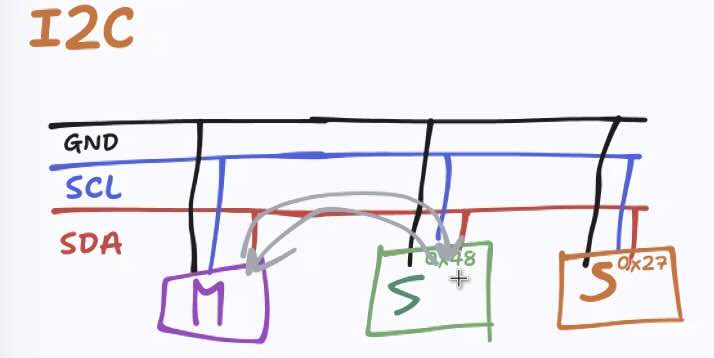
two wire interface (GND, SCL, SDA) bus configuration. There is a main (typically the microcontroler) that “directs trafic” and secondaries that report (Master, slave). Main always initiates.

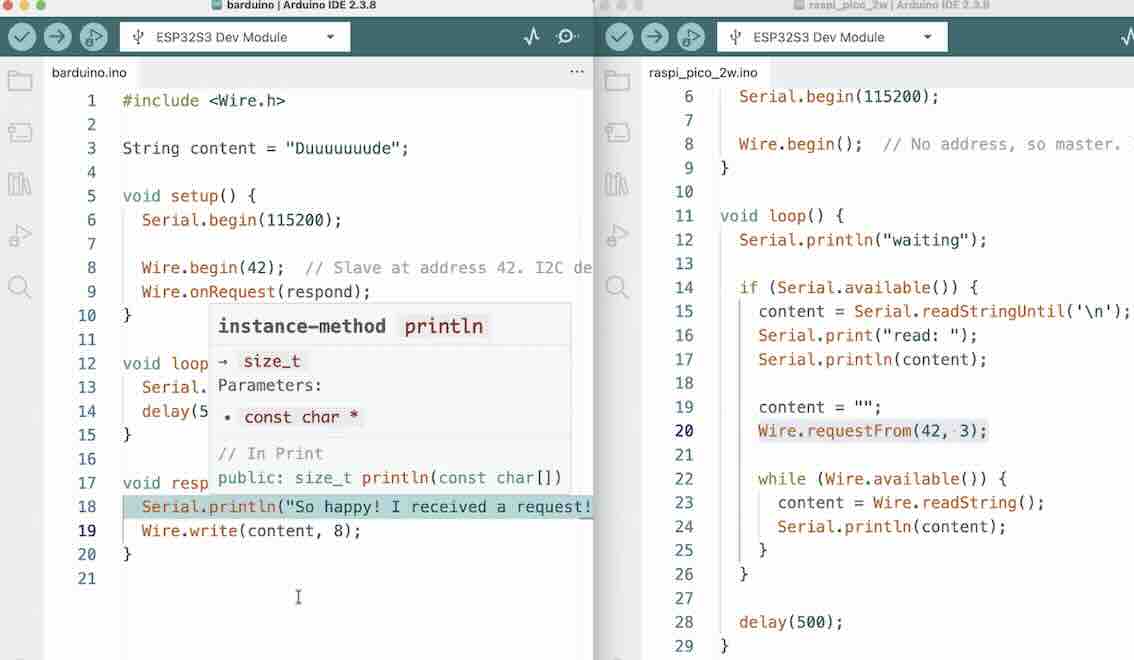
There is an arduino library library that can make your life easier #include
here is the same code as shown in the serial example Linked on the group page with I2C protocol instead.
Limitation: maiximum of 127 (2^7-1) addresses (each device must have an adress)

Limitation: maiximum of 127 (2^7-1) addresses (each device must have an adress)
SPI
Wires - MOSI: maser out secondary in - MISO: master in secondary out - MCK: - SS1, SS2…: Secondary select - GND  Examples : SD cards
Individual Work¶
Based on the what we learned with regard to networking this week I made the following decisions for my final project:
Networking Architecture
Mother Board¶
- The mother board should:
- Read the motion sensor
- Decide when the system activates
- Send an activation command
- Distribute power to the 4 subordinate boards
Subordinate Boards¶
- Each subordinate board should:
- Receive the activation signal
- Run its own local timing routine
-
Drive:
- 1 × small 6V brushed DC gearmotor
- 6 × NeoPixels
-
This architecture is simple and functional because:
- All boards perform the same high-level function
- Each board can have slightly different timing via firmware
Communication¶
- Constraints:
- Only 4 subordinate boards
- Cable length < 5 ft
-
Behavior handled locally on each board
-
Approach:
-
Use one shared ACTIVATE line from the mother board to all subordinate boards
-
How it works:
- Mother board raises ACTIVATE signal
- All subordinate boards detect the signal
- Each board executes its own programmed behavior
-