Week 10: Networking and Communications
The main outcome of the week
Design files made in this week are available at my gitlab repository
Serial/UART communication
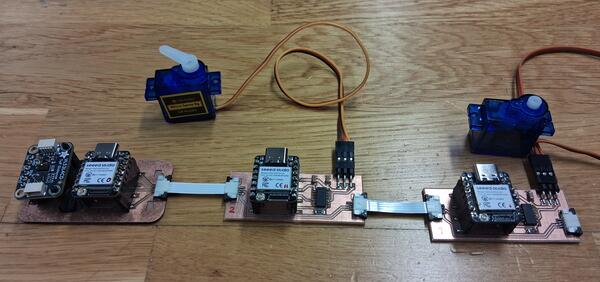
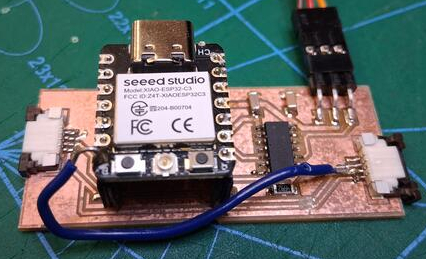
This week I’m going to work out the communication between the different microcontrollers. For this I’m going to use the same boards that I used in input and output device assignments. The Time of Flight board (XIAO 0) sends data to two identical boards controlling servo motors: distance from 0 to 10cm controls XIAO 1 from 0 to 180 degrees and distance from 10 to 20cm controls XIAO 2 from 0 to 180 degrees.
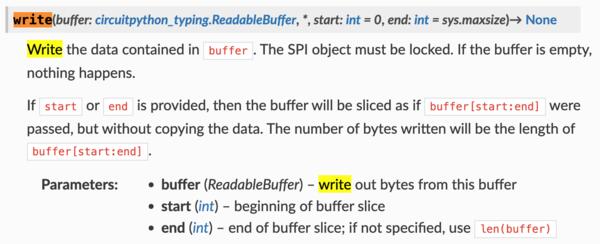
The first thing is to set up a serial connection between the sensor board and the XIAO 1. To figure out how to do that I googled “circuitpython how to establish UART connection” and ended up in CircuitPython Essentials by Adafruit. From there I found out about busio library and looked for its documentation. The main functions ares shown below.
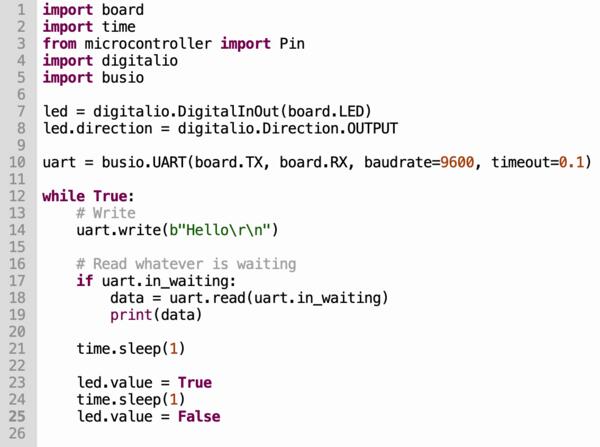
I began with the example code for reading the messages and pasted it to XIAO 1. I commented the servo code away for now.
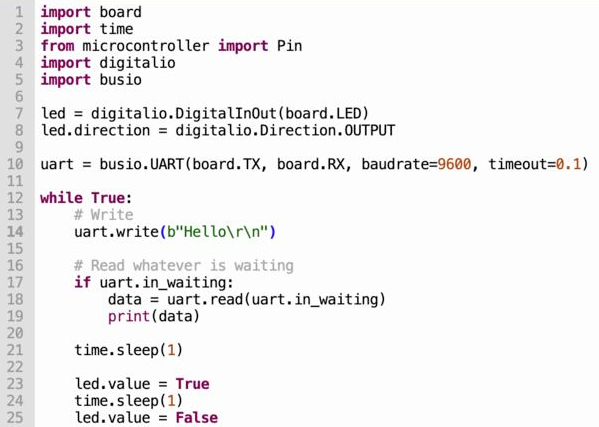
In addition, Claude (by Kris) gave an example code for sending messages with write-function and that I pasted to the XIAO 0. For both, I added code for blinking the LED to make visible the connection when established.
Then I tested the program by powering up the ToF board with my phone charger and the servo board from the computer. The messages were sent but were somewhat unstable and cryptic.

Kris came to check and mentioned about the baud rate and when checking on that I realized that I hadn’t defined timeout for XIAO 1. I checked the busio documentation and timeout is 1 by default. So I set that to 0.1 to match XIAO 0 but it didn’t solve the messaging (or only slightly?).
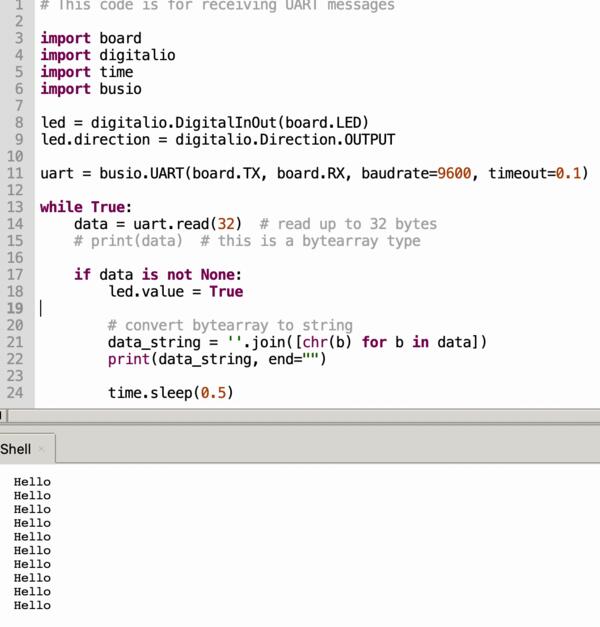
Next I started checking on the code as they were copy-pasted from different sources, and the conversion from bytes to strings might cause the issue. I didn’t really understand the write-function and the message formatting ( uart.write(b”Hello/r/n”) ) to begin with. I added print(data) in the XIAO 1 code to view the message as it comes.
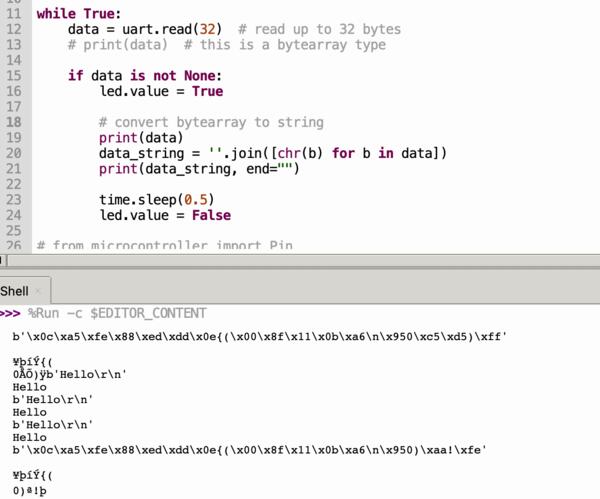
I understand this so that when the message comes as it is send, as b"Hello\r\n", the receiving code end is able to parse it correctly. But when the data is printed as longer line of symbols, the output message becomes cryptic. So the problem might not be in parsing data into string.
As I came back to this after the weekend and connected the XIAOs and got the connection established, the messaging suddenly work as supposed to so I don't know what was issue about.
Then I moved on to try to make the servo run based on the message. I couldn't get the code to understand the message with if statement 'if data_string == "Hello":'. With print(type(data_string)) I get info that it's a class that is a string.
I asked Gemini to explain me the write-function of busio library, because I didn't understand the formatting of the given code: what are "b", "/r" and "/n"? So basically b translates the string into a byte format and /r moves cursor back to left and /n begins a new line in the text (this one I actually knew).
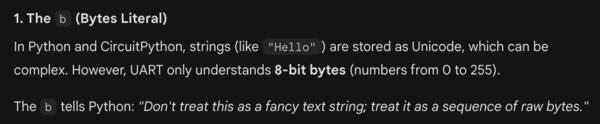


So basically what is written inside the parenthesis is the message being sent, but it needs to be converted to byte-type, and there was nothing extra regarding the messaging protocol or such: they were only formatting the message.
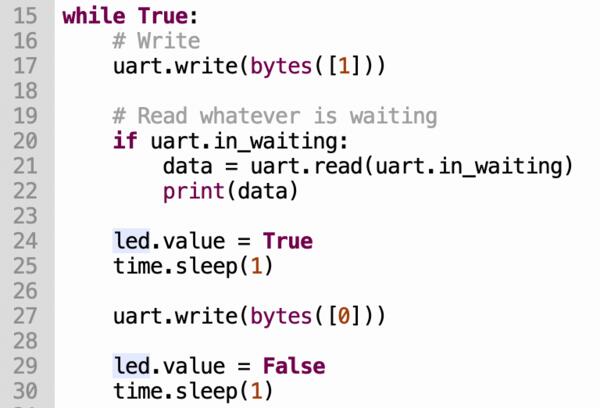
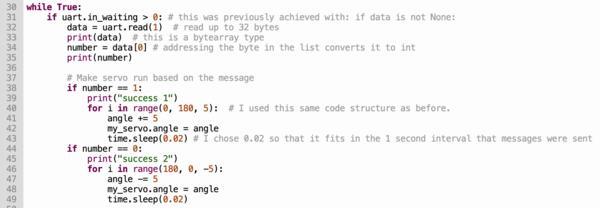
Instead of figuring out the class/string type (which would've probably been solved by 'if data_string[0] == "Hello":'), I thought I could anyway update the XIAO 1 code to send 0 or 1 instead of "Hello". However, Gemini suggested to use string type as it's easier to debug apparently. Well, I went on with int-types anyway and asked how to send and receive it. To make number 1 into bytes I used uart.write(bytes([1])) and for data = uart.read(1) and number = data[0].


After a while of debugging (which was solved by having the mentioned lines in place) I was able to make the servo run 180 degrees based on the message (1 or 0) and turning back every second.
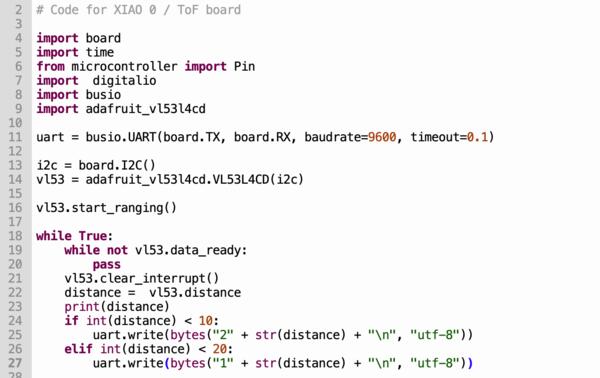
XIAO 0 (ToF/sending) code:
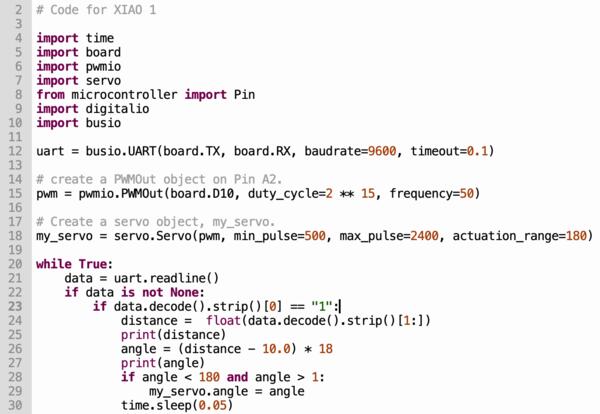
XIAO 1 (servo/receiving) code:
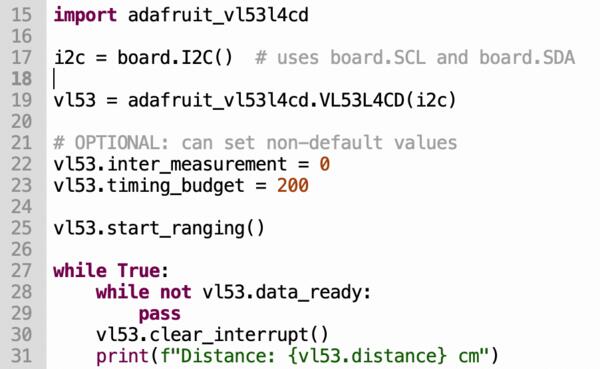
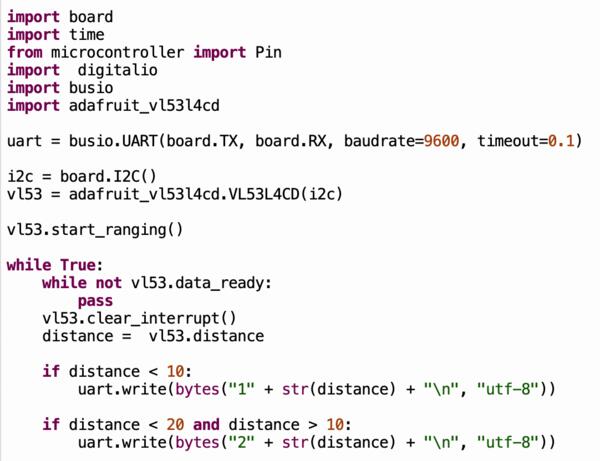
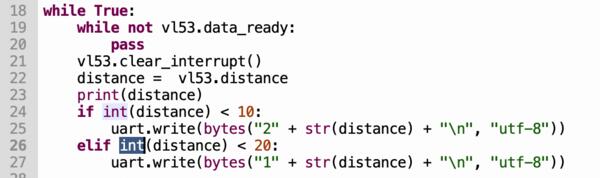
Then I moved on to include ToF to message sending. I went back to the Adafruit's sample code and copy-pasted that (excluding all the unnecessary print commands as shown below).
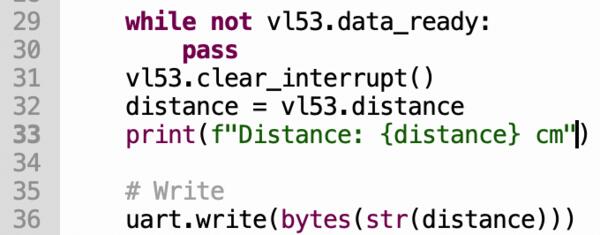
Then I began integrating it to the previous code used with messaging. I wanted to make it so that 18cm distance is 0 degrees and the servo moves 10 degrees on every cm that my hand moves closer. Here I converted the distance to string when sending it and converted back to int when receiving.
XIAO 0:
XIAO 1:
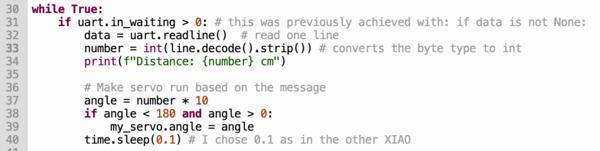
Now the XIAO 0 sends the distance in centimeters, which converts in the XIAO 1 code to int with the same code. Multiplying that by 10 and setting it as angle makes the servo move based on the proximity of my hand.
There was a "ValueError: Angle out of range" when my hand was too far so I added some limits to the angle given to the servo: it needs to be larger than 0 and smaller than 180
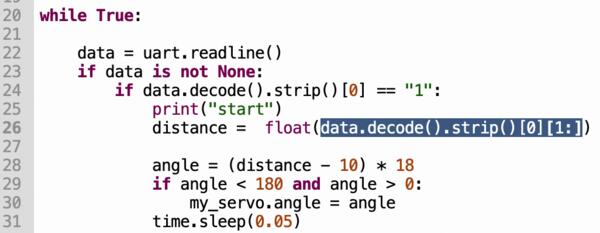
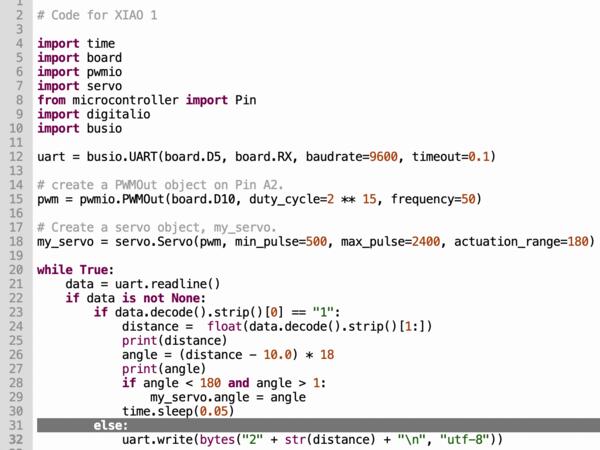
The servo is quite jumpy because it receives the angle in tenths, so I went back to send floating numbers as strings. I added "/n" to it so that readline method can be used in opening the messages.
XIAO 0
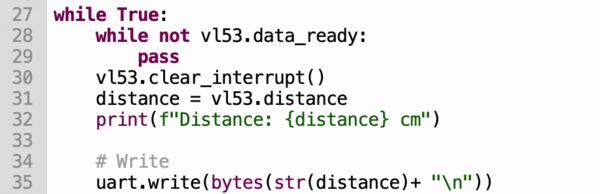
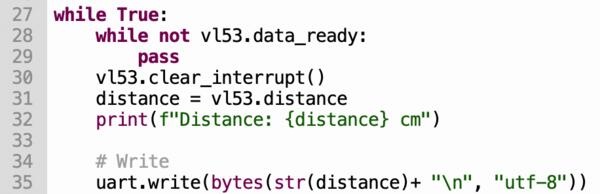
First this code gave TypeError: string argument without an encoding, but when I added "utf-8" along with the write-function, as given in an example by Gemini, the error disappeared. Then I used, as in Gemini's example, float(data.decode().strip()) to convert the byte type to floating number.
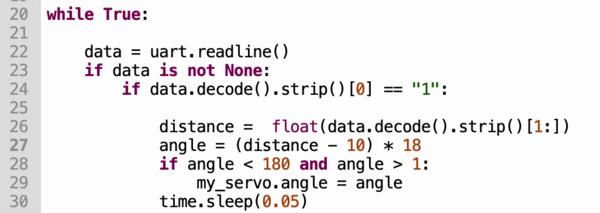
XIAO 0
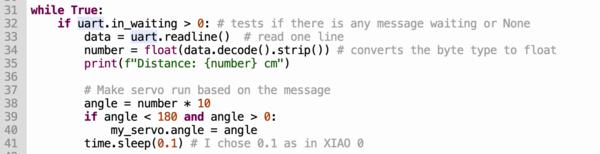
XIAO 1
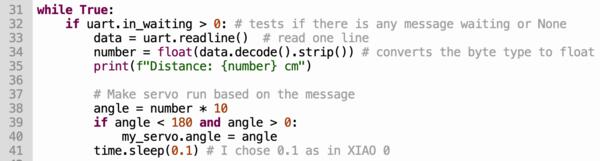
Now it moves a bit smoother as the angle is given in one degree accuracy.
Being ready to connect the second servo board and send messages over three boards, I can't do it as easily, because I lost all my electronics due to a stupid mistake (left the box on top of my car when I drove away). Now I'm in a decision should I start this experiment from the start to be able to document the last couple of hours of work, or continue with the next thing, i.e, my final project which has also networking (bluetooth) element to it.
I decided to go through how the communication would have been implemented if I still had my components at hand, and then document later how I implement a bluetooth connection with my final project.
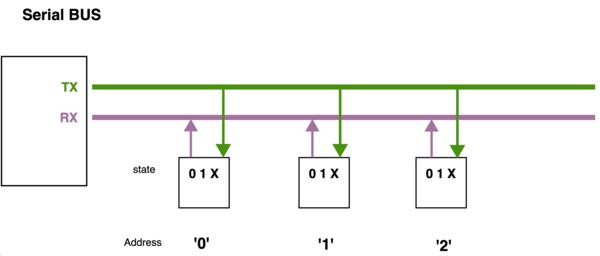
Basically adding third board to the communication chain, does not bring much complexity: I only need to add an address, eg. 1 and 2, to the sent message, add those address-ids and if-statement to both XIAO1 and XIAO2 so that they react only if the address corresponds to their address-id. This is demonstrated in the image from Neil's material.
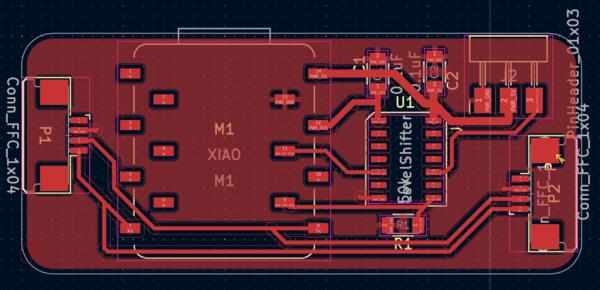
As is seen in the XIAO1 and XIAO2 PCB layout, the serial bus goes to both the microcontroller and the next connector. This means both XIAOs are receiving the same message. (It turns out this is wrong: the first microcontroller should forward the message.)
A few weeks later...
Now a few weeks later I'm back on this and made all the boards again in one day (of which most of the time went to desoldering an used XIAO board that I found at the lab). The next day I installed CircuitPython on all of the XIAOs and as I began adding the code, I realized how lacking my documentation had been here on that front.I'm afraid it's going to be too good this time either as I'm writing this after a weekend based on the screenshots and photos I took at the time.
Anyway, it was good learning over repetition as I coded the programs again using the same resources and some screenshots I had provided before. I was able to make each board work individually quite soon.
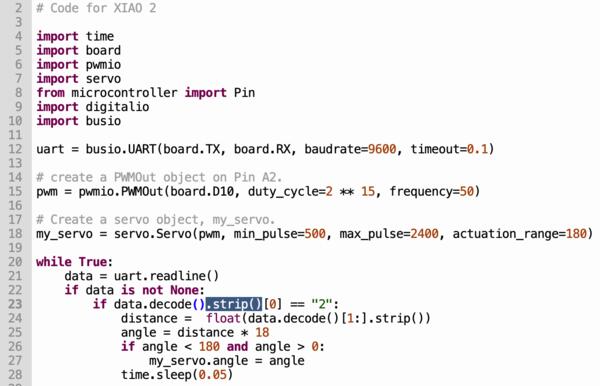
I approached the communication by adding 1 and 2 in the beginning of the message depicting which XIAO the message should reach.
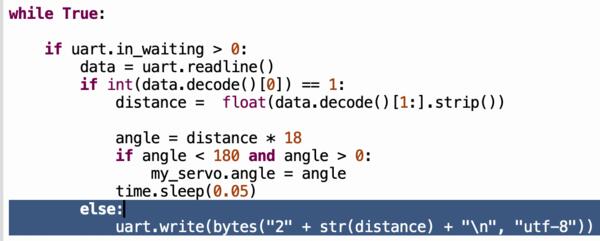
I began working with XIAO 0/ToF-board and XIAO 1/first servo board. For XIAO 1 I added else statement to forward the message if the first symbol in the message is not 1.
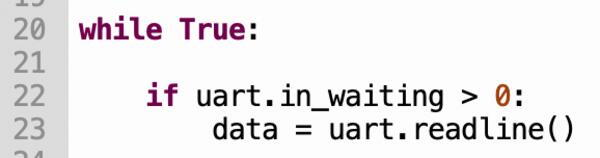
When testing, the servo in XIAO 1 didn't run. With print-commands I debugged that the message never got over the first, if uart.in_waiting > 0: -statement. I rechecked how I had done it before and changed this:
to this:
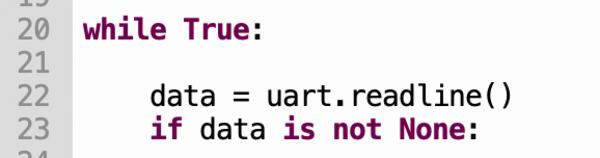
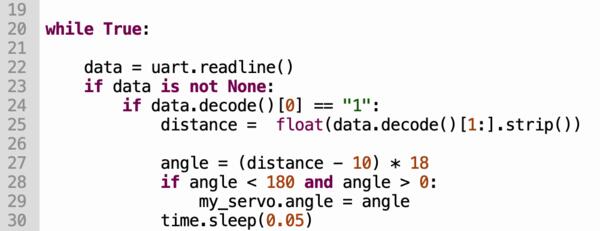
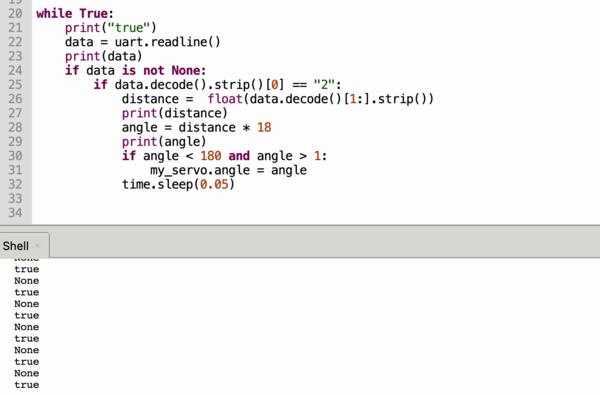
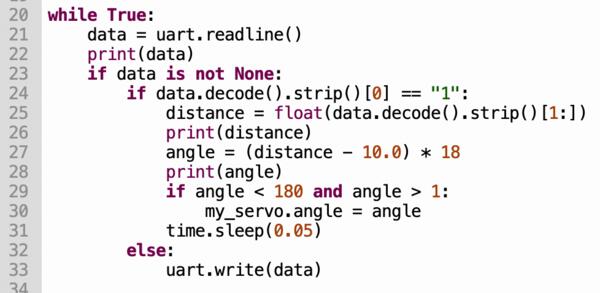
Now it got over the first if-statement but didn't work. As I was debugging with print() and then checking the code, I realized that there was .strip()-method missing in the second if-statement.
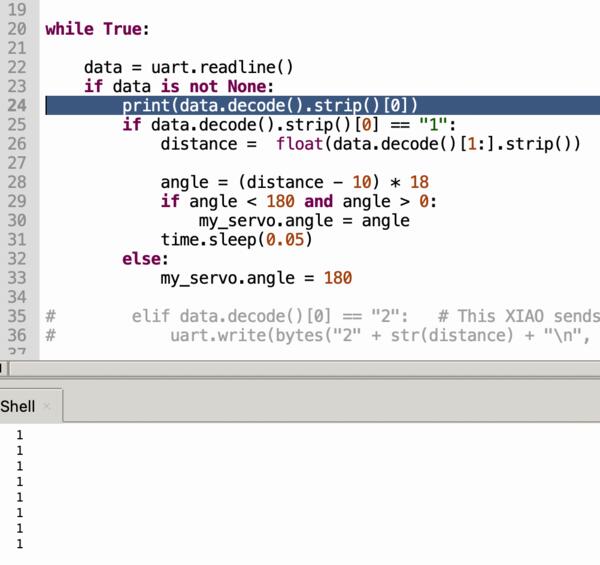
Here's the print output that made me realize the bug as well as the necessary change made.
Also on the next line there was an error with the decode: [1:] was before strip() and below an instant recorrection.
The messages still didn't come through, and after a while I found out the mistake in XIAO 0: the if-statement needed intgers to make the comparison.
Now I had the servo running with the following codes:
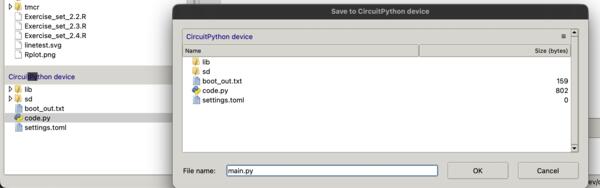
I changed code.py filenames to main.py as it appeared that code.py didn't run automatically when connected to power but main.py did.
Except when I tried the code with XIAO 2 it didn't work, but then I found a typo: an extra 5 had sneaked in.
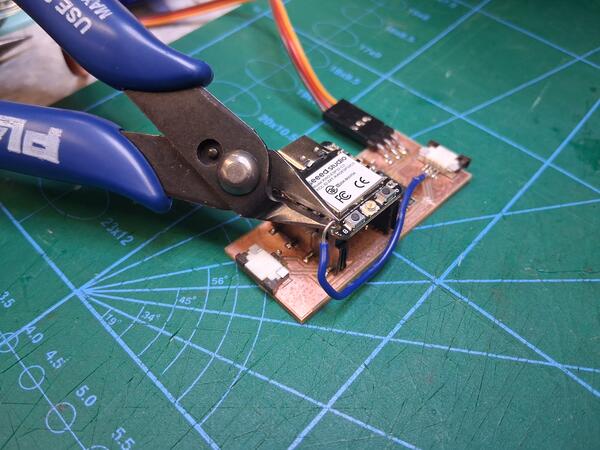
But XIAO 2 still didn't receive anything. I became to think that the problem is in the hardware. I asked Gemini what I don't get: I gave the context what I'm trying to do and gave a screenshot the PCB layout. It became clear that the messaging doesn't work like that. I prompted Gemini to explain this thoroughly. However it was confusing the pin names quite badly (XIAO and KiCad name the pins differently and in addition I had named Tx and Rx the opposite way in the PCB Layout image I provided), so I wasn't exactly sure if it did hallucinate something else as well. but (I believed) I got the main idea: the XIAO 1 needs to forward the message instead of it being routed directly to both XIAO 1 and XIAO 2. I ended up scratching the Tx and Rx routes to XIAO 2 and replace it with wire from XIAO 1's Tx to XIAO 2s Rx.
But the messaging still didn't work as supposed to.
I discussed a bit later with Kris about it and I understand that the Rx and Tx pins are for the network between the first two boards and the XIAO 1 should use another pin to forward the message. So I clip the wire and move it to the next pin.
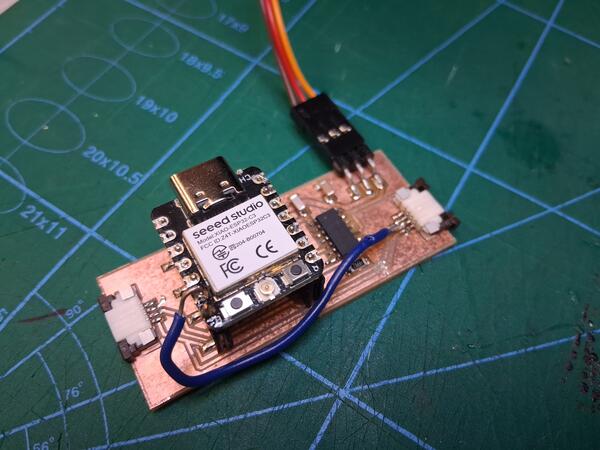
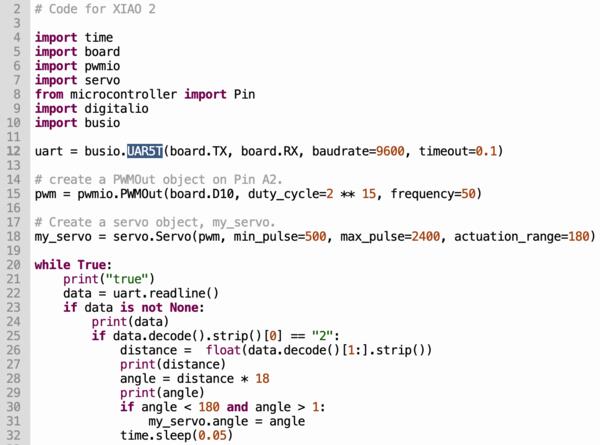
I also needed to change the pin name in XIAO 1 uart definition.

The messages still didn't reach XIAO 2 (correctly) as the following print statements showed me.
Checking code on XIAO 1, there was a clear error in the else-statement: the XIAO would need to read the distance before the if-statement for this to work.

But then I realize that it doesn't need to know the exact distance as it can just send the same data-variable it read.
And now it worked.