Final Project Requirements
Overview of week
- What does it do?
- Who's done what beforehand?
- What did you design?
- What sources did you use?
- What materials and components were used?
- Where did they come from?
- How much did they cost?
- What parts and systems were made?
- What processes were used?
- What questions were answered?
- What worked? What didn't?
- How was it evaluated?
- What are the implications?

What does it do?
The underwater drone captures live video and sends it to the surface for visual inspection tasks such as search missions, infrastructure checks, and environmental monitoring.
For Fab Academy, it demonstrates a proof of concept of an underwater drone control system. A XIAO ESP32S3 hosts a web-based joystick interface, allowing a user to control multiple BLDC motors wirelessly through a mobile device connected to the same network.
Who’s done what beforehand?
Commercial and open‑source ROVs from companies like OpenROV and Blue Robotics already provide modular, tethered underwater drones with live‑streaming capability.
The mechanical form factor and concept of this drone are specifically inspired by the FIFISH V6 underwater ROV, while adapting the design to fit Fab Lab processes and a lower budget.

What did you design?
I designed the underwater drone body, motor mounting structure, electronics enclosure, internal component arrangement, and web-based control architecture for the proof-of-concept prototype.
What sources did you use?
The project draws on prior art from OpenROV, Blue Robotics, and FIFISH V6 product information, plus online datasheets/tutorials for MT2204-2300KV BLDC motors, ESCs, joystick control, and ESP32‑S3 programming.
Fab Academy weekly assignments (CAD, electronics design & production, embedded programming, networking and interfaces) were used as technical references and testbeds for individual subsystems.
What materials and components were used?
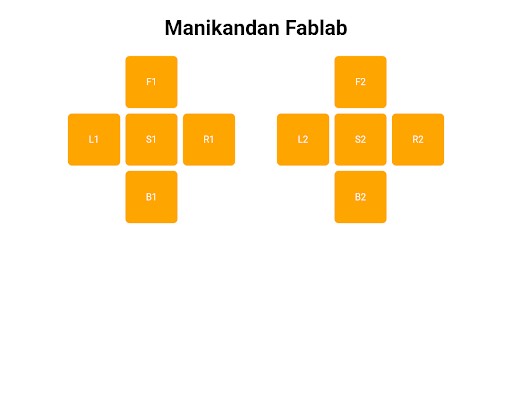
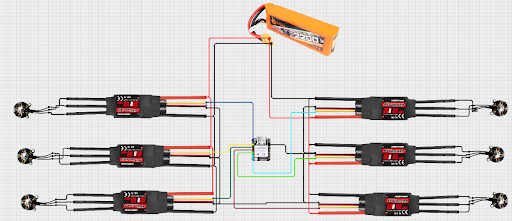
Key electronics include the Seeed XIAO ESP32S3 board for motor control and communication, MT2204-2300KV BLDC motors with corresponding ESCs and a LI‑PO battery.
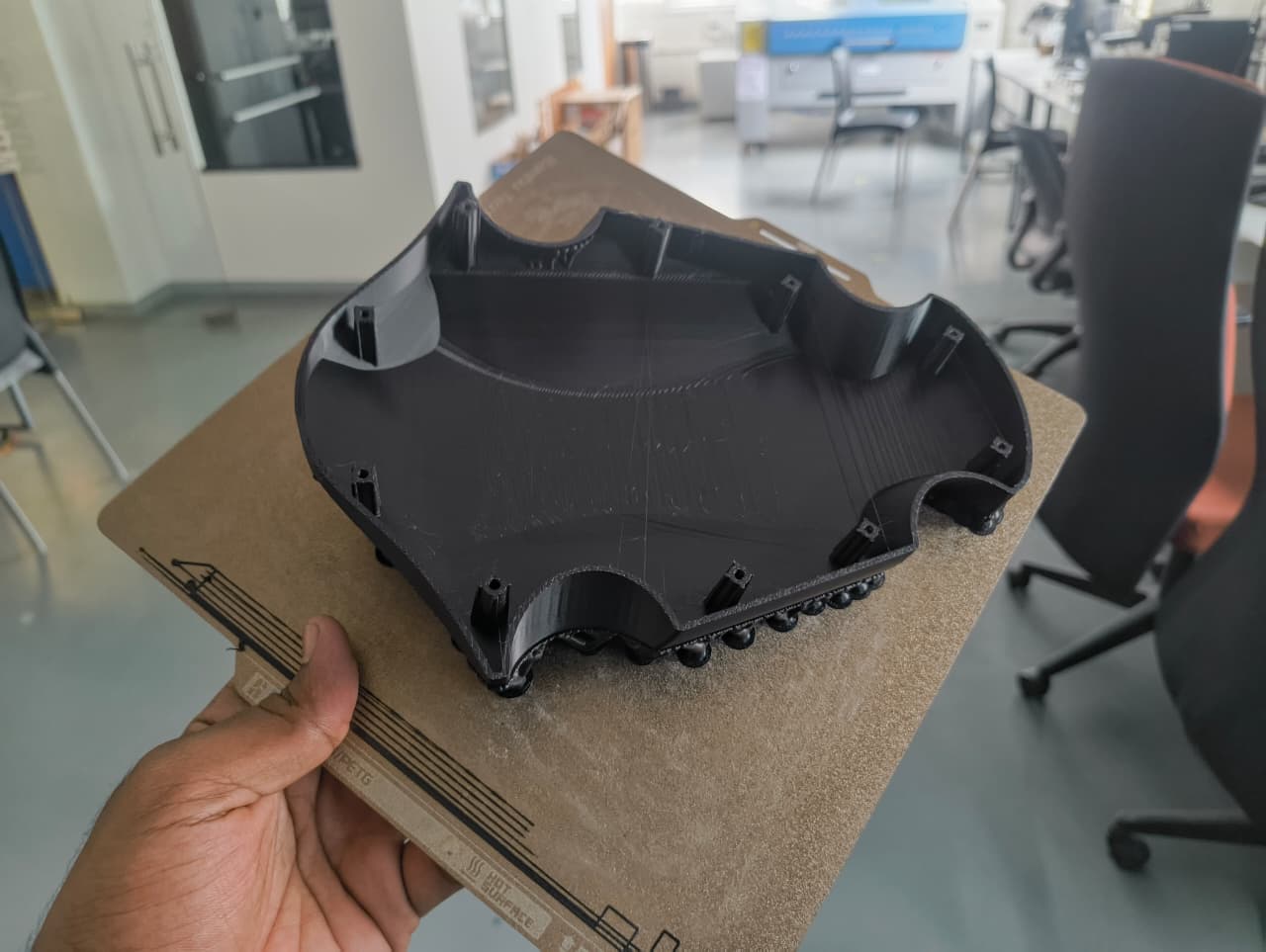
The structure consists mainly of 3D‑printed plastic parts (PLA +) for the main body and mounts, plus fasteners. To showcase the testing demonstration, QR code making in the acrylic sheet by Laser cutting.
Where did they come from?
Electronic components and some mechanical items were sourced from online vendors such as Robu, Amazon, and specialized marine/ROV suppliers like Blue Robotics where feasible.
Filament and basic hardware (screws, adhesives) were obtained through local vendors and Fab Lab inventory to keep costs and lead time under control.
How much did they cost?
A bill of materials (BOM) was prepared to estimate and track costs of the controller board, motors, ESCs, battery, structural materials, and consumables.
The cost structure is dominated by propulsion and electronics; using non‑waterproof MT2204-2300KV motors at this stage keeps the proof‑of‑concept significantly cheaper than commercial ROVs.
What parts and systems were made?
Custom 3D‑printed parts include the main hull sections and motor mounts.
A custom PCB is being developed and assembled to integrate the XIAO ESP32S3, power distribution, and signal connections to ESCs and web-based control system.


What processes were used?
The project involved CAD design, additive manufacturing (3D printing), electronics production, embedded programming, system integration, assembly, QR Generation and functional testing.

What questions were answered?
validated whether a web-based joystick interface hosted on a XIAO ESP32S3 could control multiple BLDC motors and whether the mechanical and electronic subsystems could be integrated into a single prototype.
What worked? What didn’t?
The web-based joystick interface, ESP32 communication, and BLDC motor control worked successfully. However, underwater testing was not performed because the current motors are not suitable for underwater operation. Camera integration and lighting systems were also not included in this proof-of-concept version.
How was it evaluated?
The prototype was evaluated by testing wireless connectivity, joystick responsiveness, motor control functionality, electronics integration, and overall assembly of the system.
What are the implications?
A successful prototype demonstrates the feasibility of developing a low-cost underwater drone control platform using additive manufacturing and embedded systems.
Future work will focus on underwater-rated motors, waterproof validation, camera integration, lighting systems, and real underwater operation.

