Applications and Implications, Project Development
Overview of week 17
Individual Assignment
- What will it do?
- Who has done what beforehand?
- What will you design?
- What materials and components will be used?
- Where will they come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
- What tasks have been completed?
- What tasks remain?
- What has worked? What hasn’t?
- What questions need to be resolved?
- What will happen when?
- What have you learned?
1) Project Purpose
The underwater drone will capture live video footage and transmit it to the surface in real-time for underwater inspection, useful in search missions, infrastructure checks, and environmental monitoring.
Focus area to achieve
For Fab Academy I only plan to do it functionally operate by using joystick control (if possible Camera Integration) and can withstand the depth uptp 10 meter for sealevel pressure. But I will develop it later to detect the corrosions in underwater to inspect the seawater constructions.

2) Market Research
Companies like OpenROV and Blue Robotics have developed underwater ROVs for similar purposes, focusing on modular, open-source designs with live-stream capabilities. I designed this Underwater dorne by the inspiration of FIFISH V6

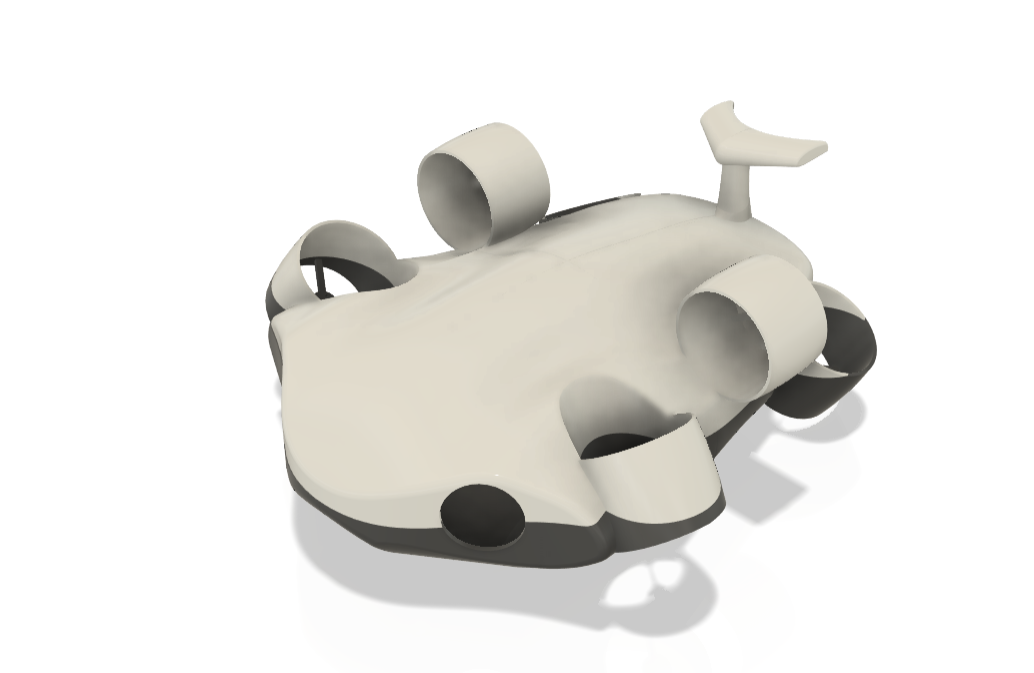
3) Design & Engineering
I designed the waterproof body to withstand the water pressure, propulsion system, camera housing to place it without affecting by water, and electronic integration for video streaming, control, and power distribution.
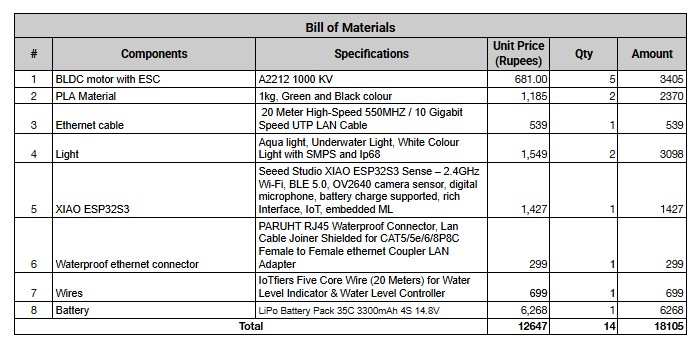
4) Materials & Components
For the Motor output control I used the XIAO ESP32S3 board, and for the budget constraints now I can’t go further to purchase the water proof BLDC motor so I choose the A2212 BLDC motor with ESCs to achieve the POC level, tether cable, and Li-ion battery.
5) Sourcing
Most components will be sourced from online electronics platforms (e.g., Robu.in, Amazon, Blue Robotics) and local hardware stores for structural materials.
6) Cost Estimation
7) Custom-Made Parts and Systems
By using the 3D printer I will printed the Drone body which is I designed and for the PCB I am also will develop the PCB board and soldering the electronic components
8) Fabrication and Assembly Processes
For the Fabrication I contribute my work to 3D printing, epoxy sealing, soldering, waterproofing, and embedded programming.
9) Unanswered Questions / Challenges
- How long can the device function in underwater by battery power fully
- How much the body will be water proof without water going inside
- How much heat will be generated inside the drone body and condensation will happen
- Clear sight for camera how this can livestreaming even the shallow water
10) Evaluation Criteria
Based on its live-stream clarity, control response, waterproof reliability, and ability to perform basic inspection tasks.
11) Progress – Completed Tasks
- Initial design of the Underrater done completed
- 3D printing is going on
12) Pending Tasks
- Motor coding and testing
- WaterProofing
13) Working vs. Non-Working Elements
- I tried the Motor coding for first joystick its woriking but I should do also the 2nd joystick control
14) Unresolved Issues
I have less time to do the camera integration so this part I can’t cover within this period of time due to the lack knowledge of Image processing, I will do after learning about it.
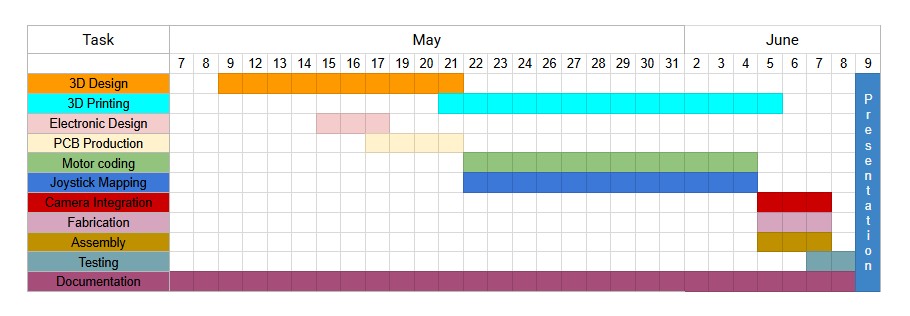
15) Timeline / Project Plan
I start the 3D printing parts in my printer but its getting late by some issuses but I hope it will finish before the end date
16) Key Learnings
- Surface modeling of 3D Design
- Hydrodynamic design
- Arduino Coding
- Joystick mapping to control the output devices
- Waterproofing
- 3D Printing
Conclusion
This project has deepened understanding of underwater systems, waterproof design, and real-time video transmission. Once completed, it will serve as a functional prototype for low-cost underwater inspection, with potential applications in research, rescue, and infrastructure monitoring.