18. Wildcard week¶
This week I made a soft robotic gripper that I want to use in my final project. Unlike traditional methods (molding & casting), I wanted to make a gripper that is easily reproducible, requires one manufacturing process, and minimal post processing. So, I created a 3D printed gripper which incorporates the concept of living hinges. The gripper will be actuated by pulling strings.
Design¶
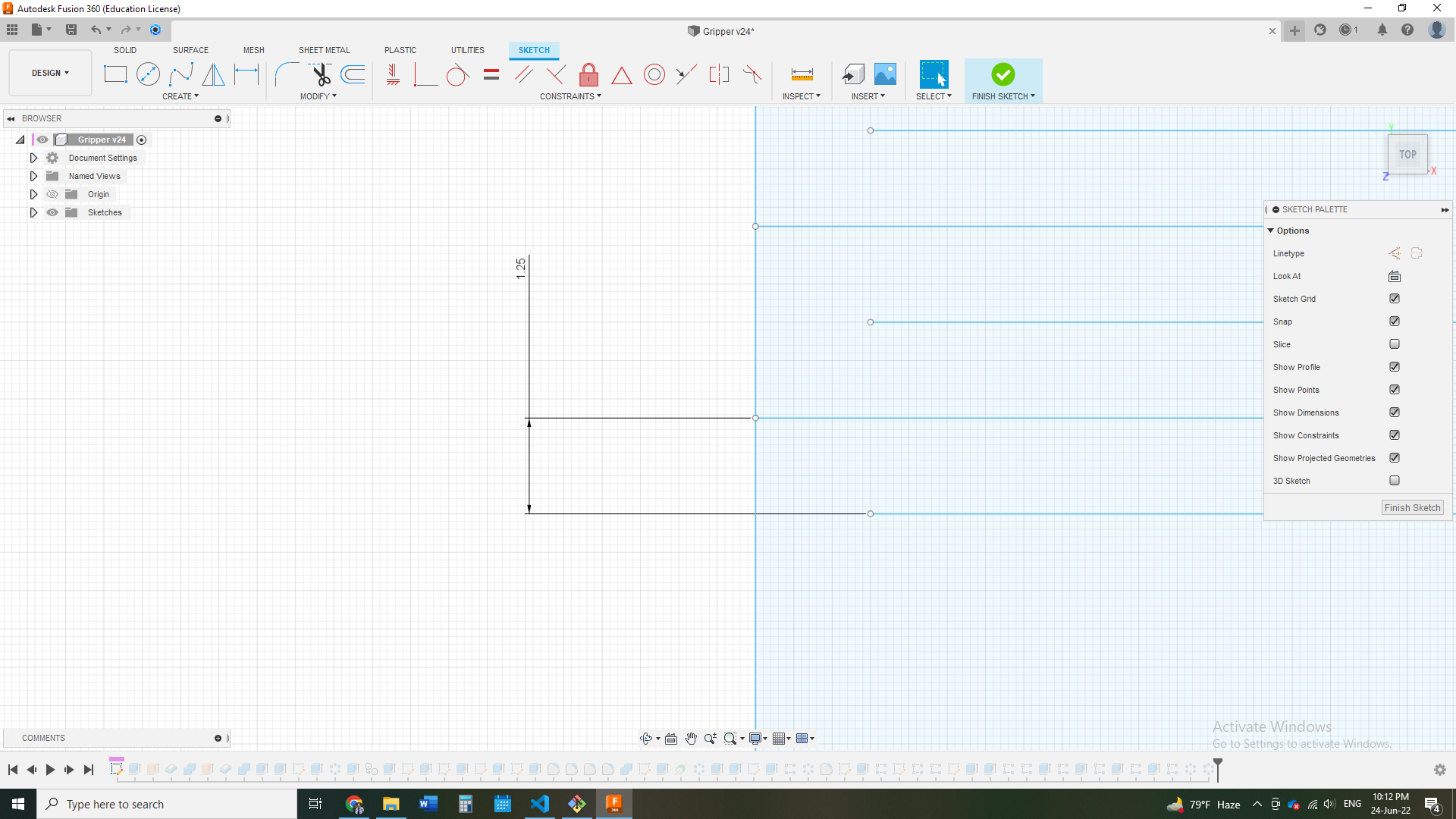
I started by sketching a single finger, which includes lines that make up the living hinge.
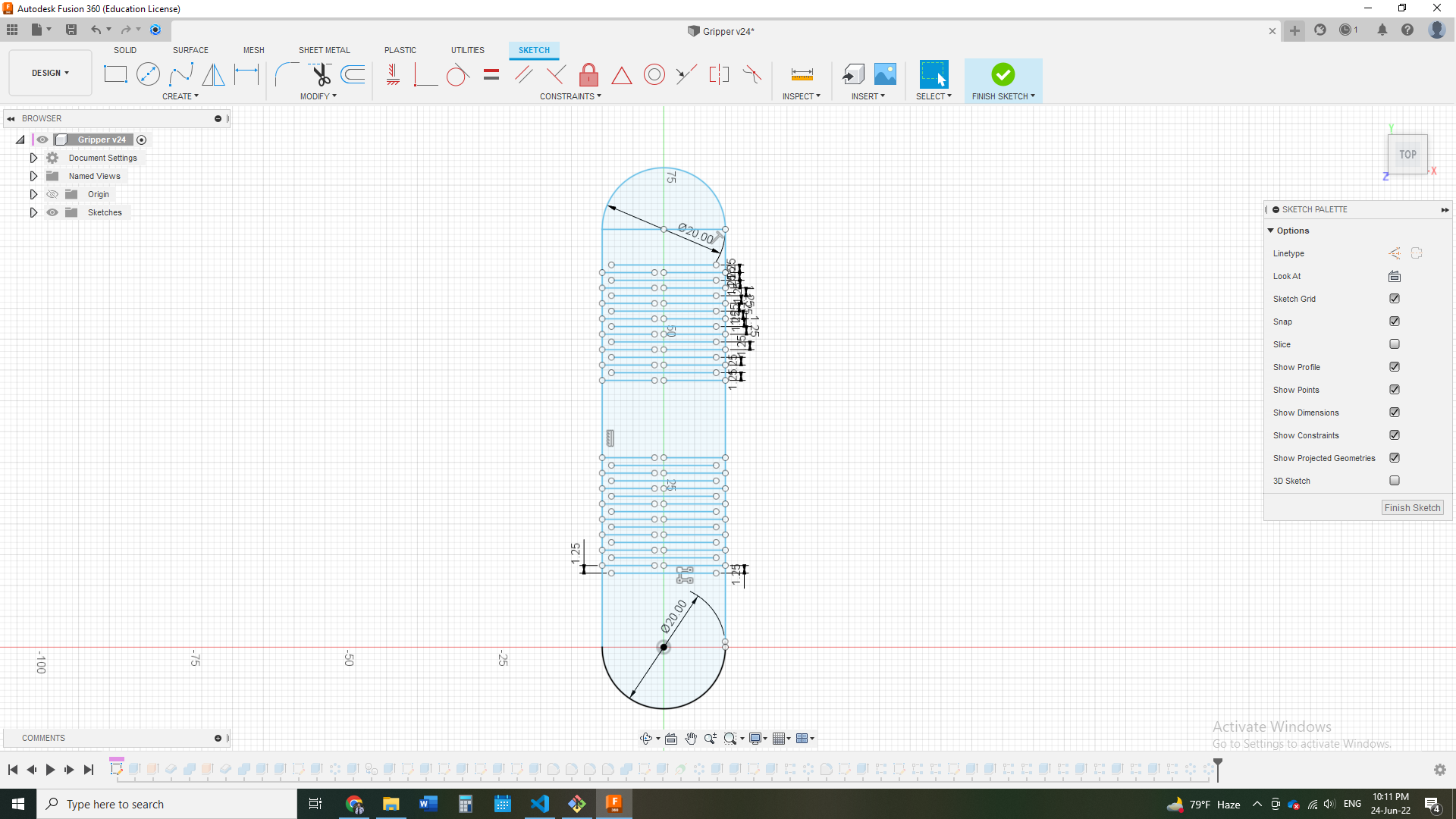
I chose the spacing to be 1.5mm.
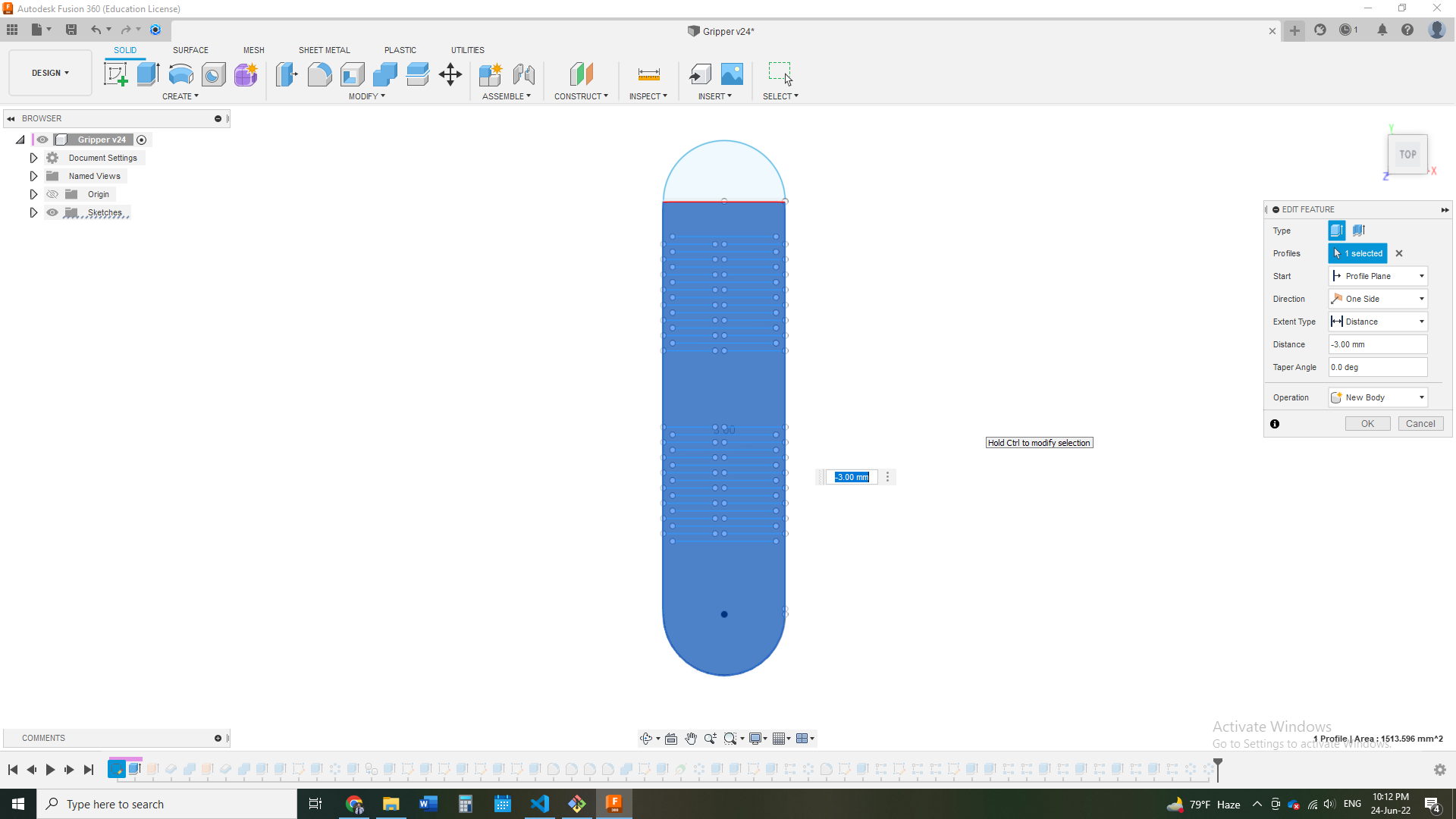
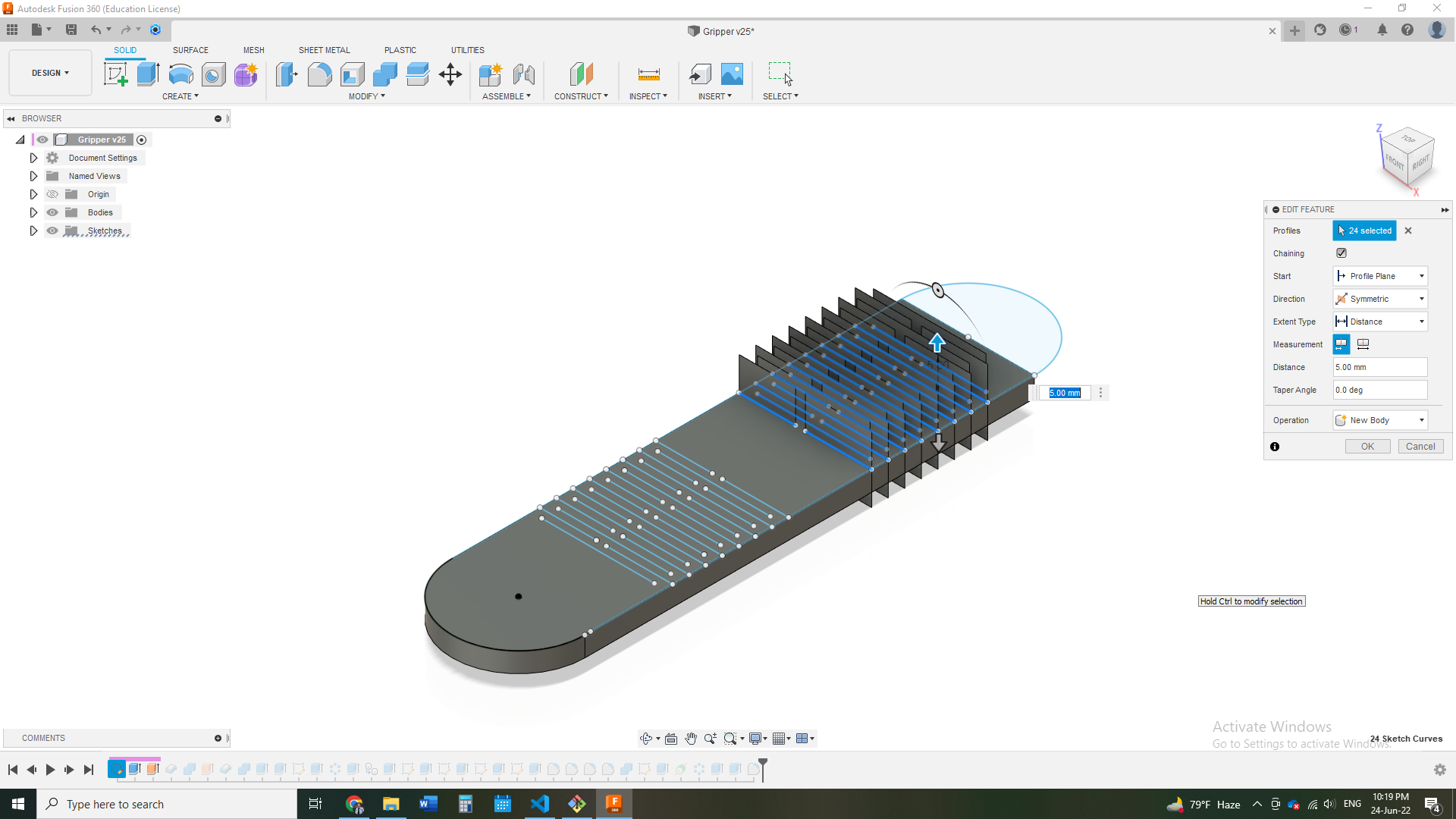
Then, I extruded the finger 3mm
After that, I made a surface extrusion of the lines.
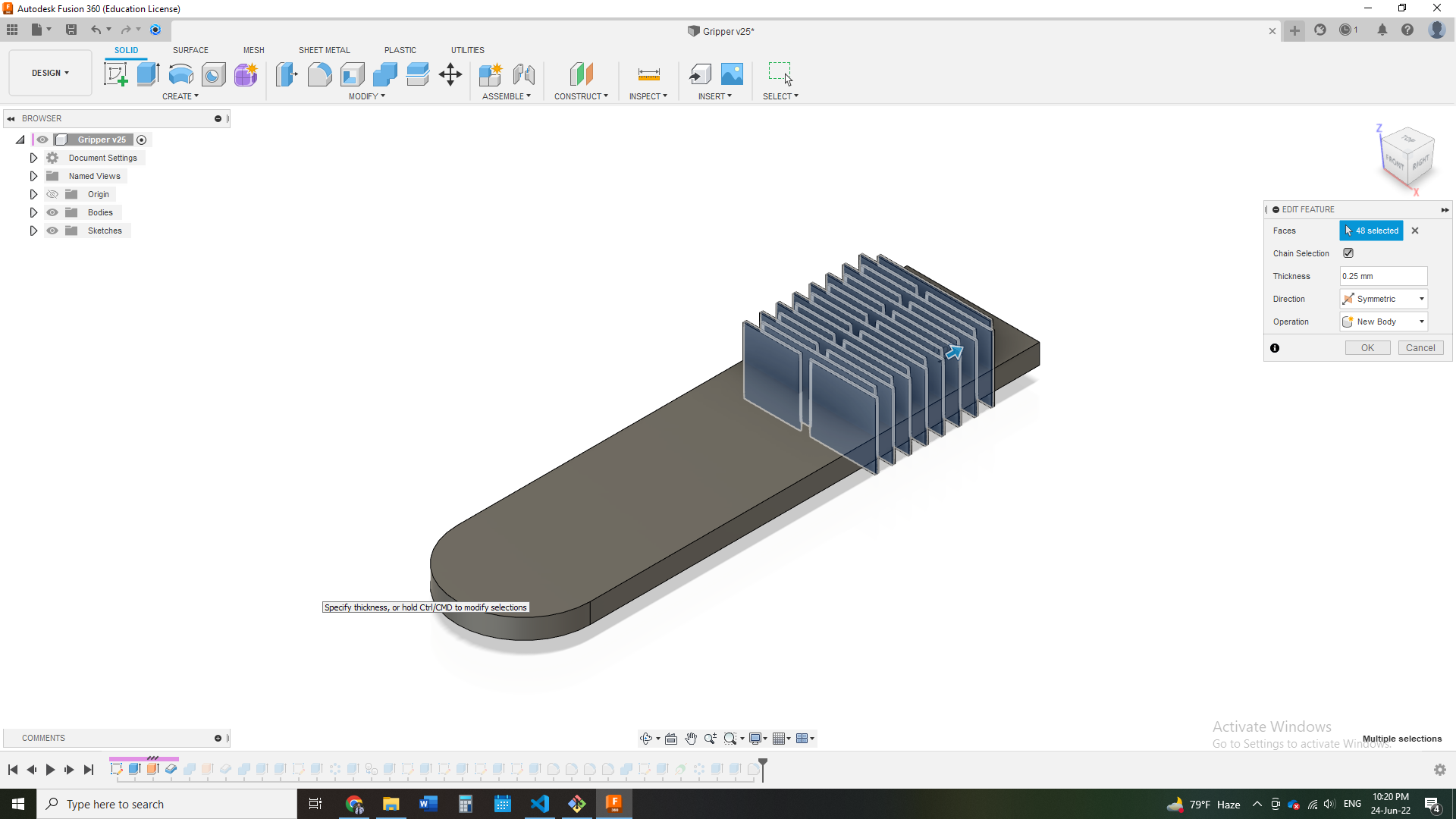
Afterwards, I thickened the surfaces to be 0.25mm
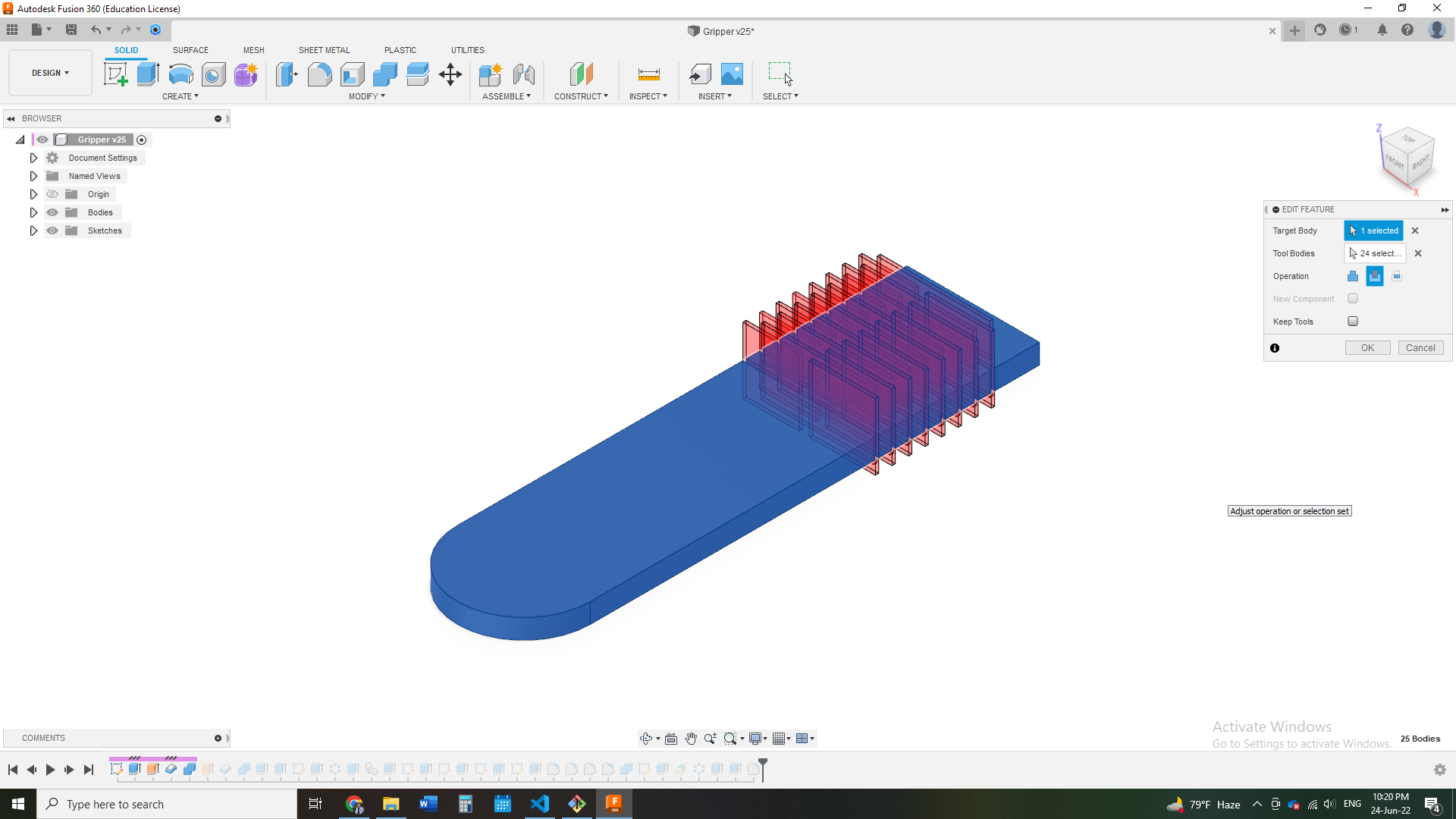
Now it’s time to combine all bodies, and choosing the operation to cutting
Then, I created a circle. I added an inner circle which will create space for strings.
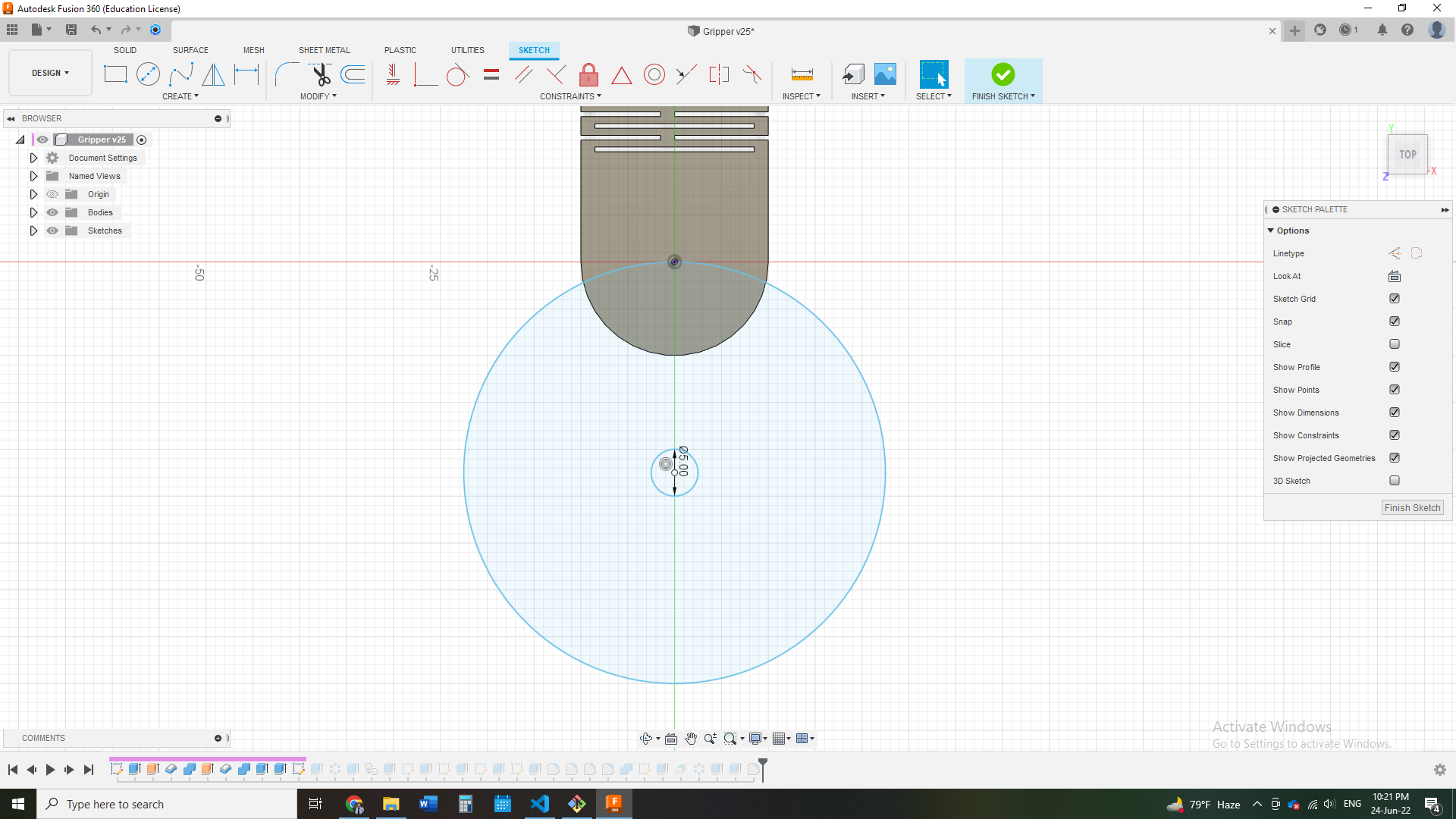
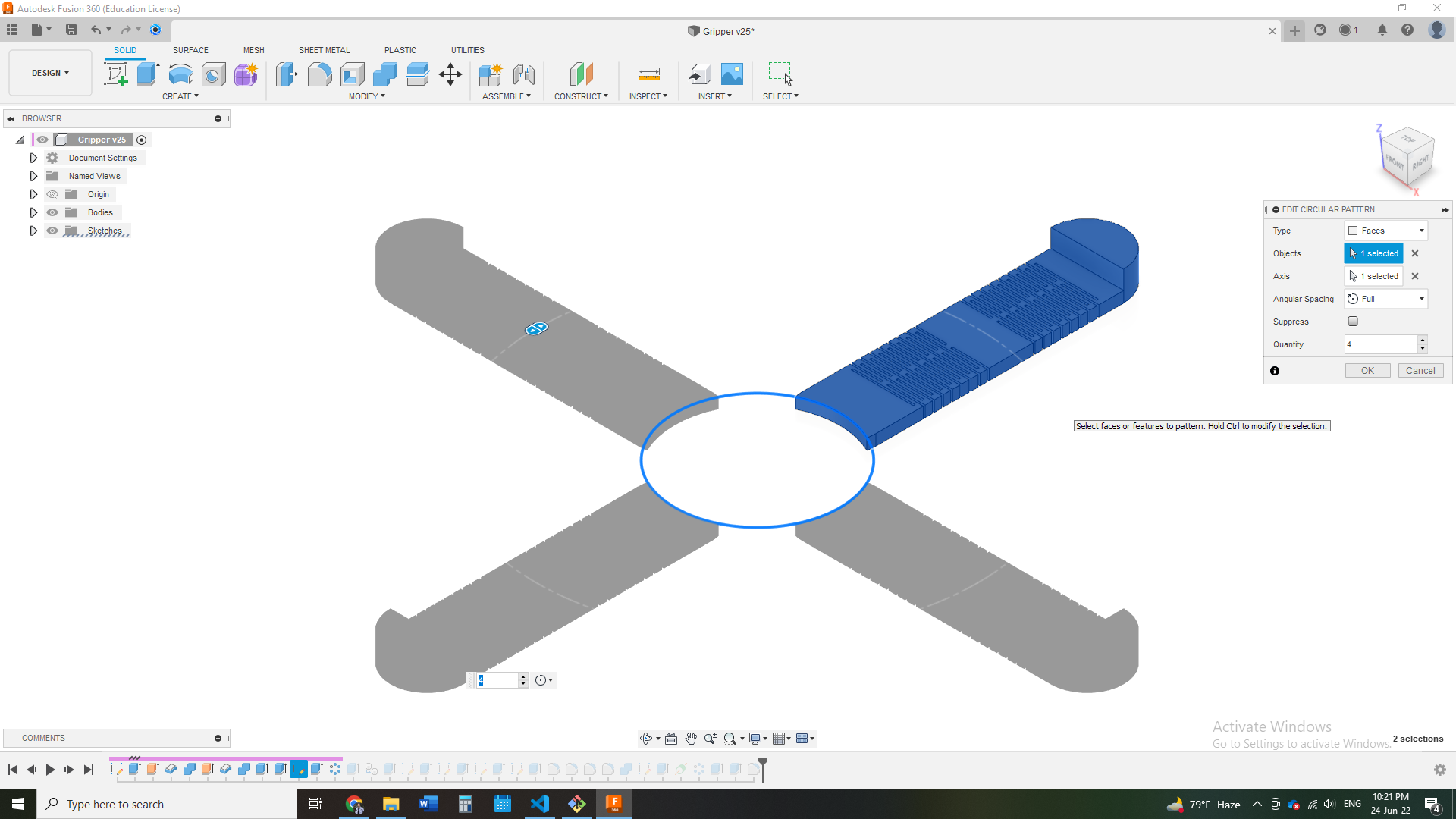
After that, I created a circular pattern to make the fingers 4.
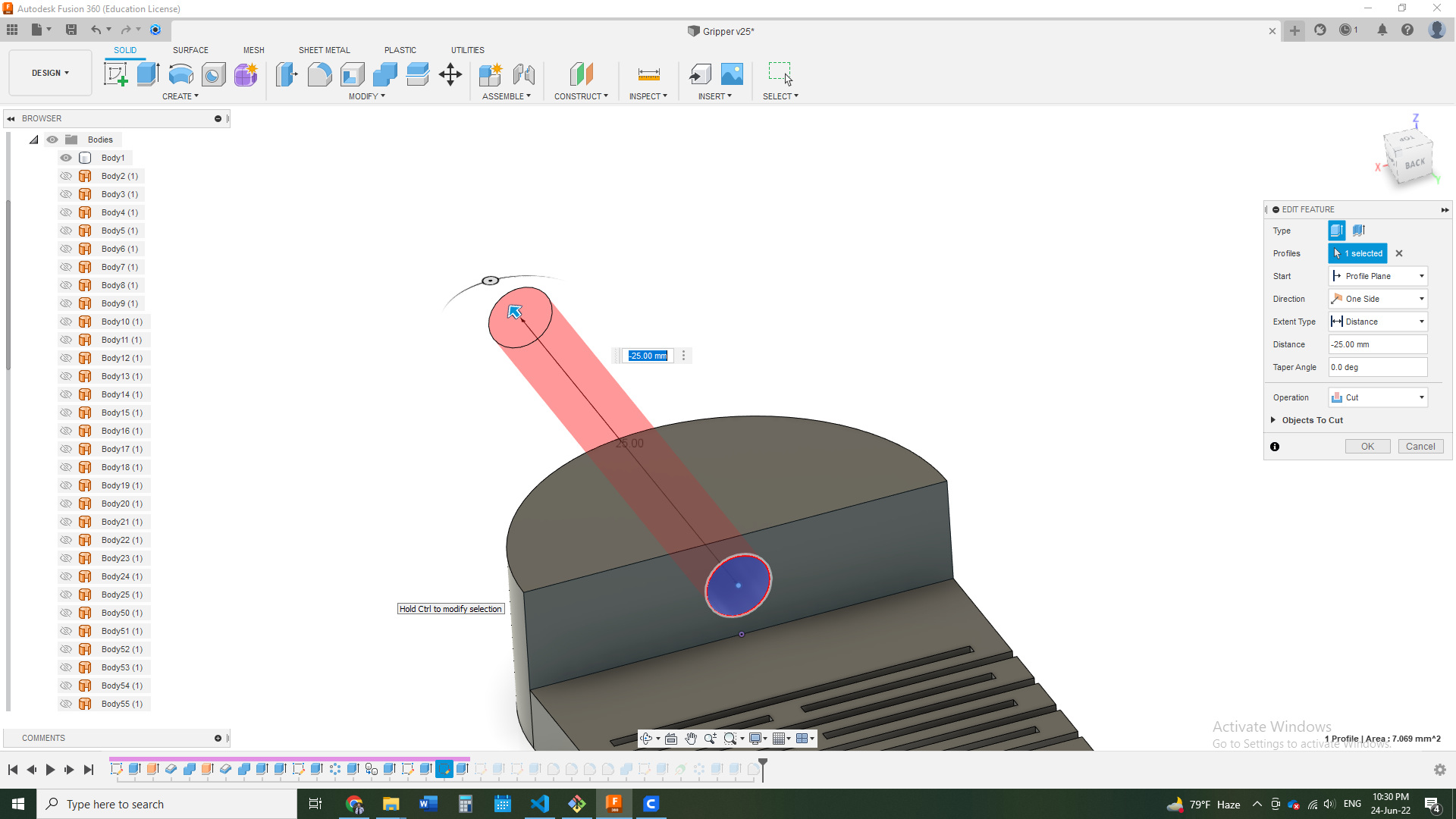
Then, I created a place for the strings
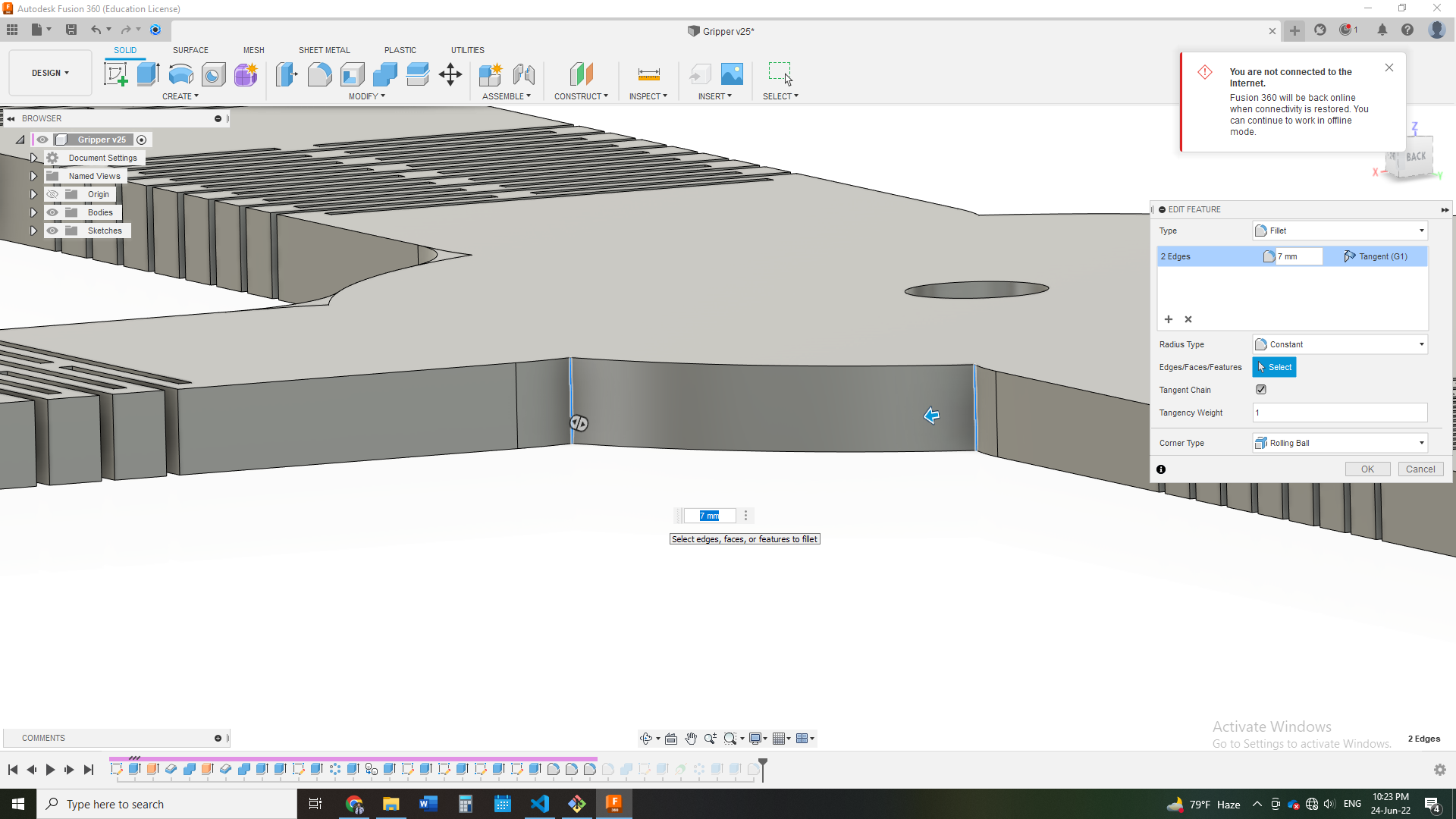
After that, I created some fillets to remove sharp edges.
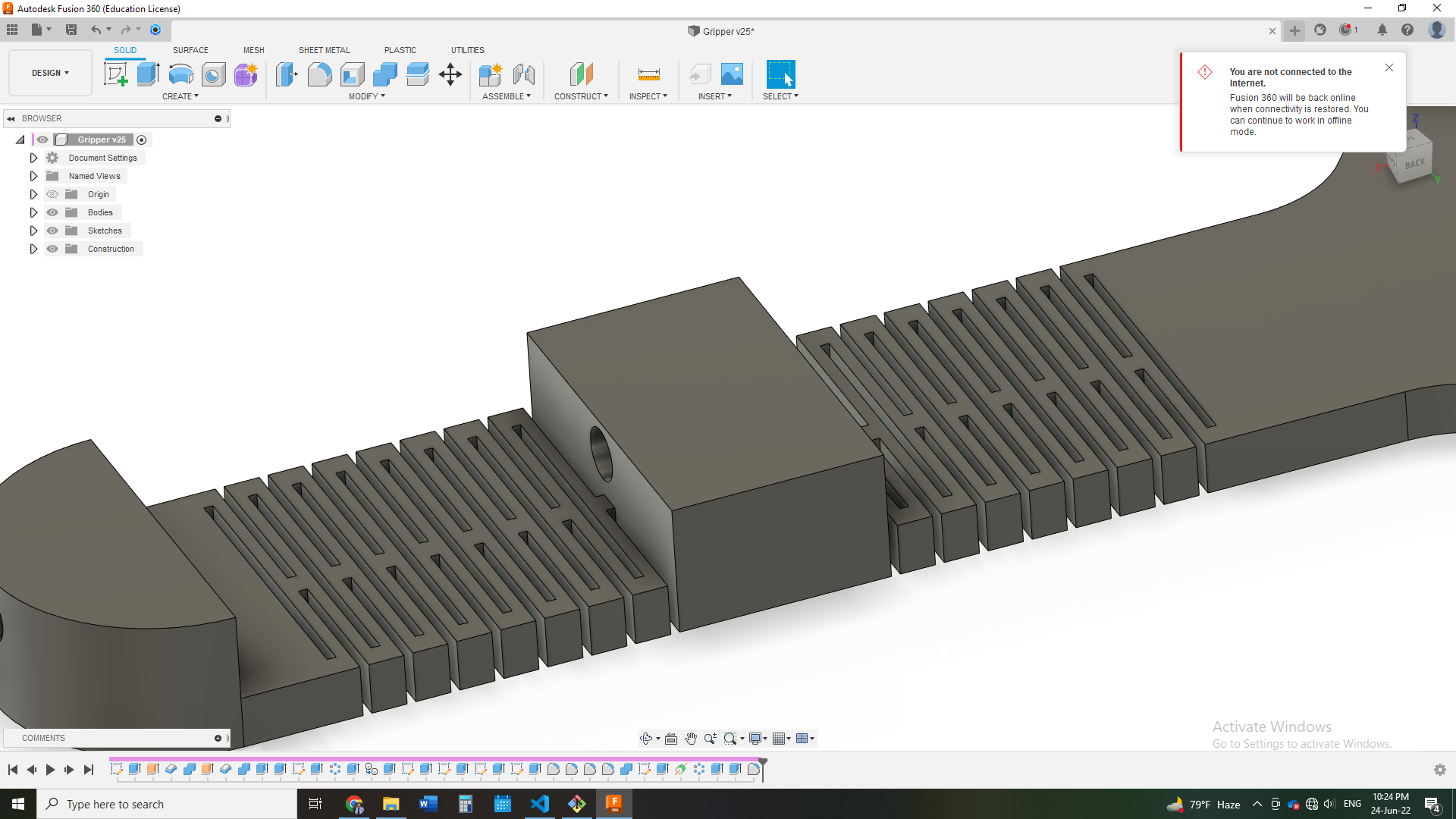
When I printed this design I faced the problem of strings motion being not controlled which made gripping objects hard. So, I edited the design to add the part shown below. Its main objective is to hold the string and allow for gripping on objects.
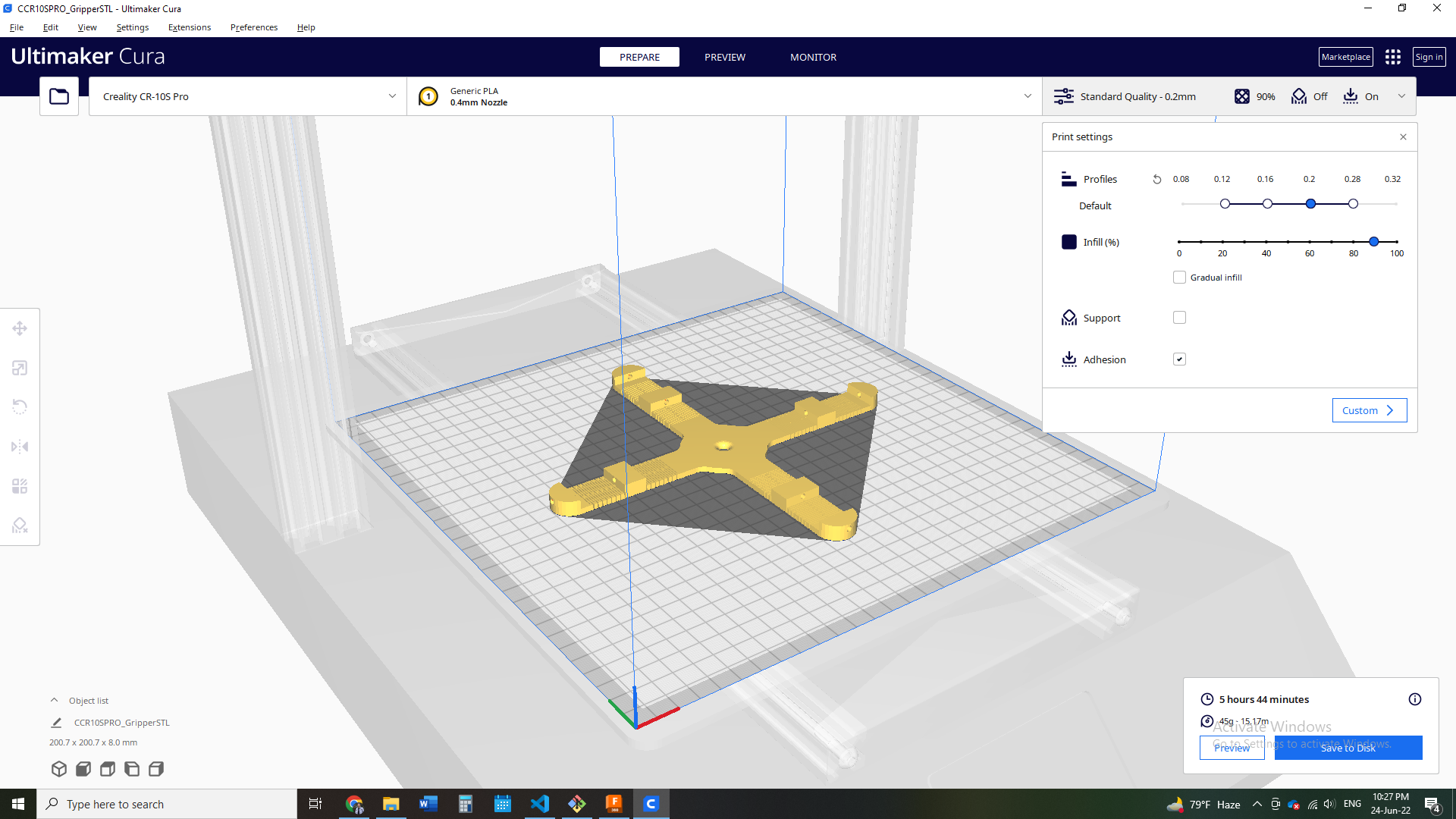
3D Printing¶
In order to print the gripper I used Cura to slice the 3D model. I chose to have a high infill of 90% because I have small parts that will endure high stress. So, I needed to reinforce them.
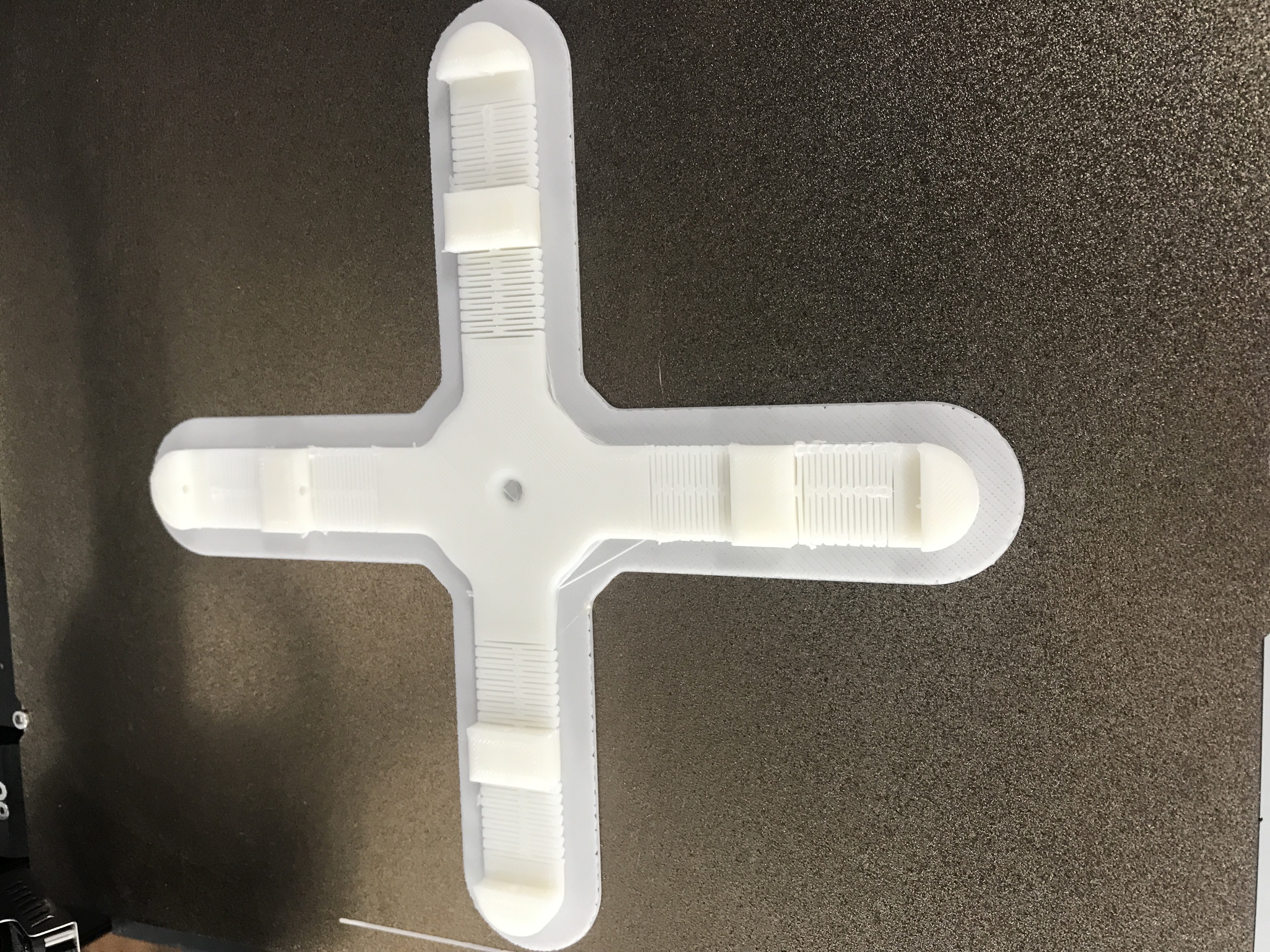
After printing, the gripper looked as follows