About me¶

Hi! I am a mechanical engineer specializing in robotics-based problem-solving approaches. I have experience in computer-aided design (CAD) software, digital fabrication, computer vision, and artificial intelligence. Moreover, I am research-oriented, and I have published research in the field of autonomous micro aerial vehicles.
Visit this website to see my work!
My background¶
I was born in a Amman, the capital of Hashemite Kingdom of Jordan, but I’ve lived in the UAE for 18 years.
Previous work¶
Below are some of my favorite projects.
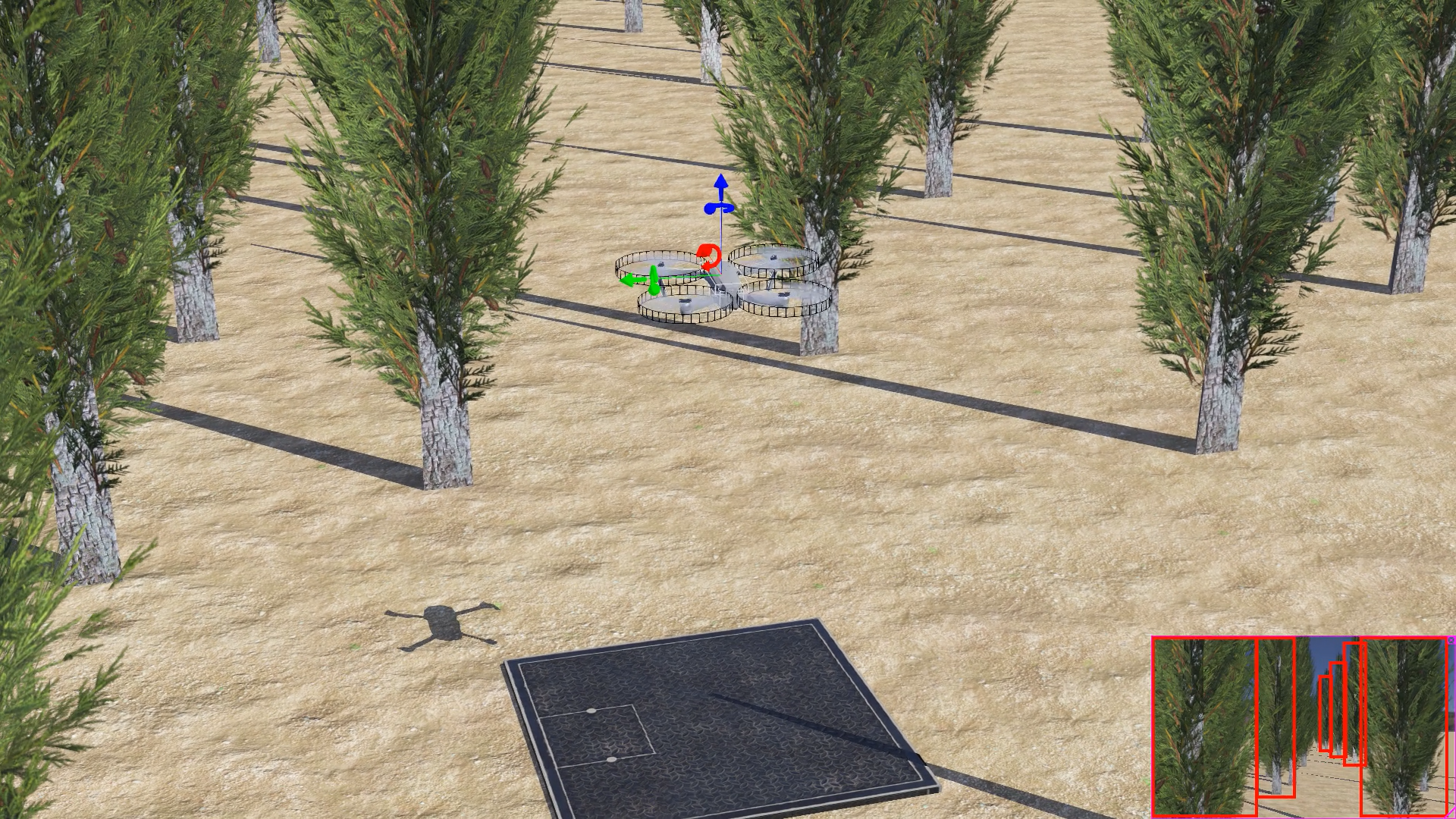
Optic Flow-based Vision System for Autonomous and Collision-free Navigation of Micro Aerial Vehicles¶
In this work, a monocular camera-based obstacle avoidance system was designed to improve autonomous operation of quadcopters in dynamic environments, already hindered by sensors’ heavyweight and processing and energy requirements. The work underwent two stages. First, the system dynamics were modeled, linearized, and controlled using PD controllers. Then, an optic flow-based hybrid obstacle avoidance algorithm was developed. The algorithm consisted of three approaches that account for avoiding frontal and peripheral objects, while aiming to the final position. The developed system was tested in a challenging scenario that mimics a real forest using Webots simulator. Results demonstrated an 85% success rate of avoiding obstacles. Cases of system failure resulted due to the linearization constraint which blocked ad hoc aggressive behaviour.
Here is the presentation of the project.
Gesture-controlled Soft Robotic Gripper¶
This is a proof of concept prototype of a soft robotic gripper that is designed to grip on soft objects, like eggs, without breaking them. The project went through multiple stages, starting from CAD design of the gripper and the box, which serves as a stand for the gripper. The design of the gripper incorporated the concept of living hinges in order to allow for the bending of the fingers. Then, both the gripper and box were fabricated using a 3D printing and a laser cutter, respectively. After that, an Arduino board is programmed to actuate four servo motors that pull down the fingers. Finally, I programmed an image processing AI using Python, which detected which fingers are up and which are down, and then established serial communication with the Arduino to actuate the respective servo. You can watch it working here.