19. Invention, intellectual property and income¶
1. Assignments :¶
Have you?
- Develop a plan for dissemination of your final project.
- Prepare drafts of your summary slide (presentation.png, 1920x1080)
- Prepare draft of your video clip (presentation.mp4, 1080p HTML5, < 1~minute, < ~10 MB)
2. Dissemination¶
As my project could be used as a base for other team which want to work on opponent detection, the project will be put on the following site :
- The site of my robotic team : http://leskaribous.fr
- The forum of the competition : http://www.planete-sciences.org/forums/
I will also make a video of my work on my YouTube channel : Barbatronic.
My work will be completely free and open, and I will open a discussion into the competition forum so we can discuss with other teams about the improvement of this kind of system.
3. Intellectual Property¶
As I said, before, the goal of the project is to have an open, easy and low-cost way to detect the opponent for a lot of teams. Saying that, the project will be completely open with just an attribution licence.
I find a very good diagram showing how to choose the right license by reading the documentation of another student of the FabAcademy 2019 : Gustavo Deabreu.

To apply the licence and have the logo and the right terms, I went on the creative commons site.

Ce(tte) œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution 4.0 International.
I’ll include this license throughout my website and project files.
4. Presentation draft¶
4.1 Slide draft¶
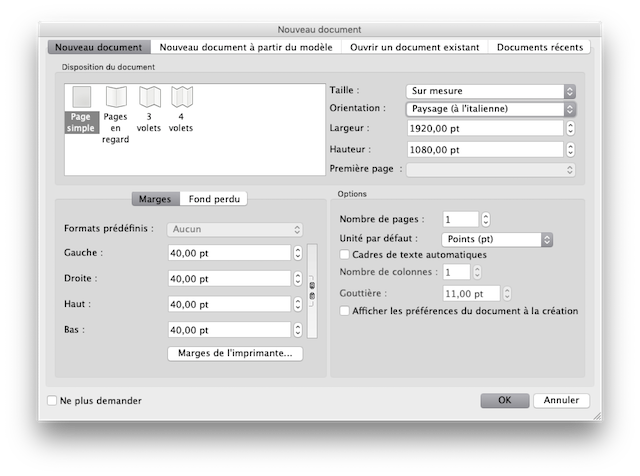
To work on my slide, I will use the free and open source software Scribus which is an Adbod In-Design like software.

| Parameters of the page | The software main window |
|---|---|
 |
 |
On this slide, I need to put :
- My name
- The project name
- The FabLab name
- A photo/render/sketch of the project
- A brief description of the project
To that, I will add :
- The license I choose
- The reference to the robotic competition
- The reference to my robotic team
- An explode view of the project
- A view of the interface I’ve developed
I also have to write a brief description of the project. I will use the following : “The purpose of this project is to develop a LIDAR system to detect reflective beacon for a robotic competition. The conception is modular so we can easily change the sensor or the motor to improve the system. It send positions informations to other systems thought a serial communication and can be directly connected to a robot or to computer interface for debugging.”
4.2 Video draft¶
For this assignment, I decided to make a scripted video. There will be a voice-over,I will do a script and I will need to film a lot of rushes.
The video need to be at least 1 min ( 60 seconds ). For a dynamical video, every single shot must last between 3 and 5 seconds. So I need between 12 and 20 shots for this videos.
So I decided to :
- Film some videos of my robots in action for the explanation of the context
- Take some shots from the match replay during the 2019 competition
- Film the beacon in action with different angles
- Film the beacon with the interface into my computer
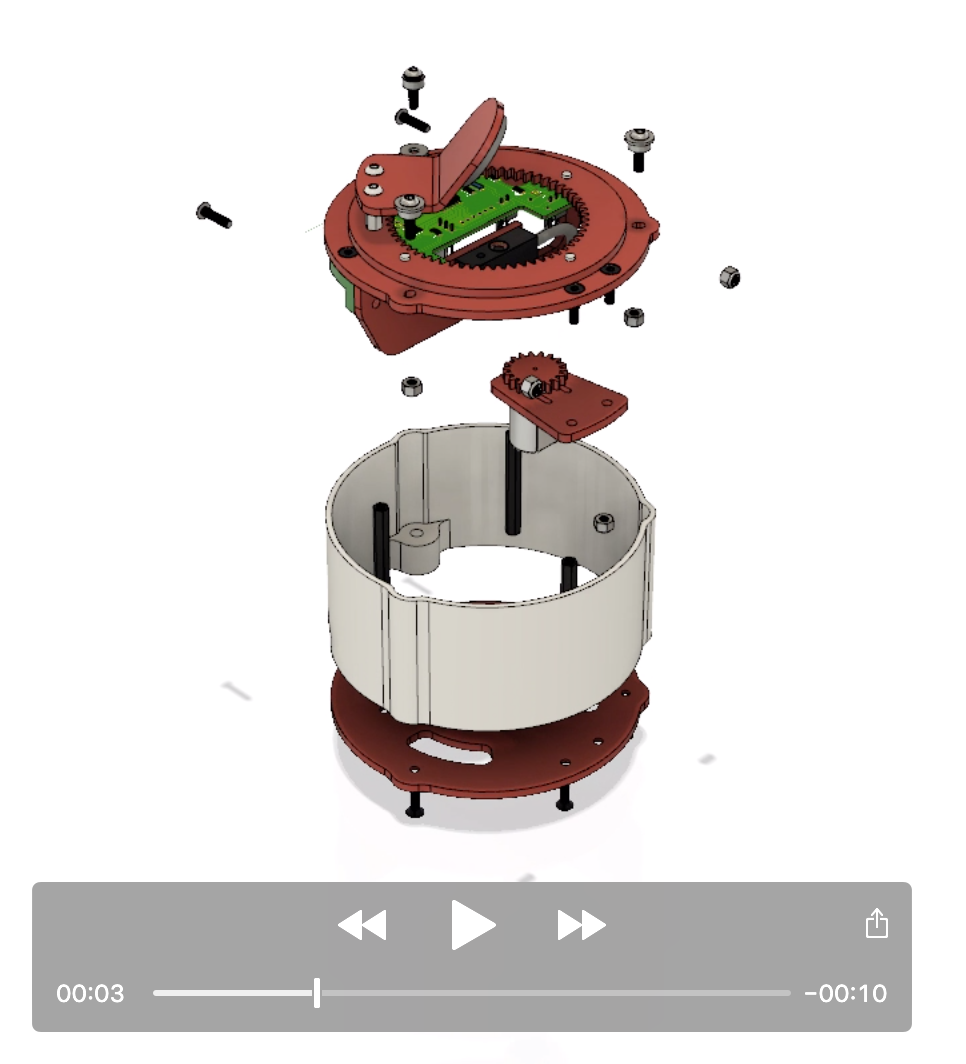
- Use Fusion 360 to make great film of the assembly and disassembly of the project
To do that, I used my Canon 80D reflex camera, and the equipment I use for my Youtube channel barbatronic. I film the ruches into the FabLab on the robotic table.
| Filming the project | Filming the project | 3D disassembly |
|---|---|---|
 |
 |
 |
4.2.1 The script¶
Just to clarify my mind during the video’s editing of this mini film, I made a quick script of it :
-
- Opening title - fabAcademy style - beginning of the voice-over
-
- View of the robotic competition
-
- View of the robots
-
- Film of the opponent avoidance problematic
-
- Animation of the concept
-
- Multiple view of the project
-
- Disassembly animation of the project
-
- Shots of the project working
-
- Shots of the interface
-
- View of the project with :” what works and what needs to be improved”
-
- Final view with credits
4.2.2 The voice-over¶
I wrote a voice-over that will be recorded with my micro Bird UM1, which is a very good USB microphone for voice playback.

And here is my voice-over text I wrote : ” Hi, My name is Adrien and I’m a FabManager in charge of the robotic section of the French FabLab La Machinerie in Amiens.
Each year, I compete in a huge french robotic competition where robots has to perform a multitude of different actions to earn points. One key things is fair play ! That’s why the robots must avoid each other.
Since a long time, my team use a simple sensor that scan the field to find a reflective beacon put on the opponent. It works well at low speed, but is a disaster when we decide to accelerate the robots and we don’t know the position of the opponent neither in angle or in distance.
That’s why, I decided to work on a new kind of system that involve a spinning mirror with speed regulation, and that can calculate the position of the reflective beacon and send it to a robot or to a computer interface I developed.
For the moment, I’m calibrating the system at a very low speed. As you can see, it’s able to see the beacon, to find it’s angular position and to send it to a serial port. The distance detection is still a little bit tricky with the sensor I choose but, as it’s a modular conception, I will be able to easily change and test other sensors.
Thank you for watching this video and feel free to check my documentation for more informations”