Presentation¶
My project¶
My project is to work on building a sort of “LiDar” for our robots of the french robotic cup, so our robot will be able to detect other robots on the table, can make decisions and may change his strategy during a match. I would like to develop a cheap but efficient solution so it can be used by other team of the competition.
The reason is that number of team haven’t a efficient system of detection, especially beginners, because of the price of the sensor ( LiDAr , laser ) and because of the development time.
So it have to be simple, efficient, has to be in line with the rules of the competition and can be improved if the teams want to go further.
Context¶
My robotic team¶
Founded in 2011, my robotic team is named “Les Karibous” and participate to the french cup of robotics Eurobot. Every year we build a new automatic robot and goes to Eurobot challenging the other 150 teams.
The Eurobot competition¶
Created in 1998, Eurobot is an international amateur robotics contest open to teams of young people, organised either in student projects or in independent clubs. Eurobot takes place in Europe but also welcomes countries from other continents.
Through technical skills and project management, the Eurobot contest highlights values such as fair-play, solidarity, knowledge sharing and creativity. The main goal of this event is to encourage youth to practice robotics with fun, by offering them an unforgettable technical and human experience. Each year, a new theme is defined, with original actions to perform and a 100% self-made robot to build. Project management, task sharing, autonomy, team spirit and experimentation are the core values to achieve one’s project and be ready to compete on the D-Day.
Eurobot and its national qualifications always take place in a friendly and cross-cultural atmosphere.
For more informations, please visit the Eurobot site.
Goals of the robots during competition¶
Every year, a new theme is released with new rules, and the robots has to make differents actions to make points. Dispite those change, a lot of rules are common every year such as the time of the match, the maximum size of the robots, the scale of the playing area and the most important rule :
Warning
All teams are required to equip their robot(s) with a system for detecting opposing team’s robots. This system is intended to prevent collisions between robots, during a match. This point will be systematically checked during the homologation. Referees will pay special attention to non-fairplay teams that deliberately deactivate their avoidance systems after passing the homologation stage.
You can see on this video a presentation of our robot for the 2018’s cup and a match at the end of the video :
Problematic¶
But for a lot of team, this rule implies the use of just one or two sensors like infrared, and the robot just stop when it detect something … and is not able to know if this is because there is another robot in front of him or an element of the playing area or … the light of the spot who blinds him ! Moreover, when two team have the same strategy, the match just stop as the robots …
So, I decided to think about a solution that can be simple but efficient to avoid collision and that teams can make easily and adapt on a lot of different robot no matter what kind of micro-controller or system they use to drive their robots.
The concept¶
3D view :
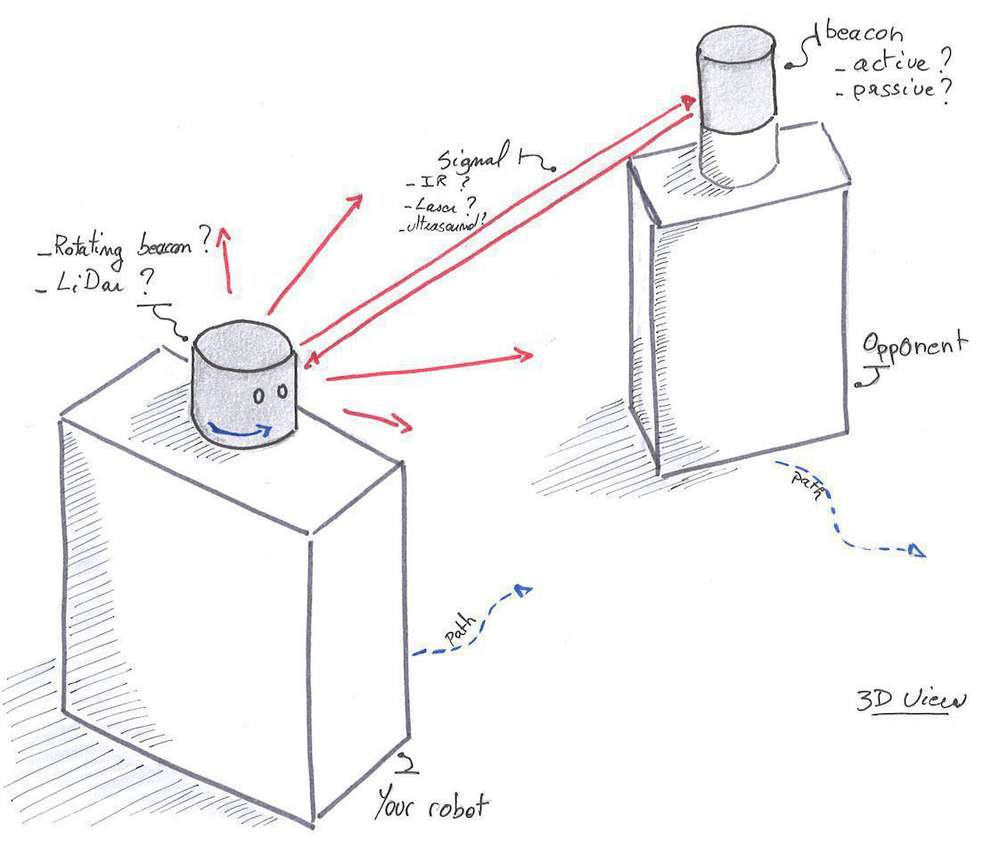
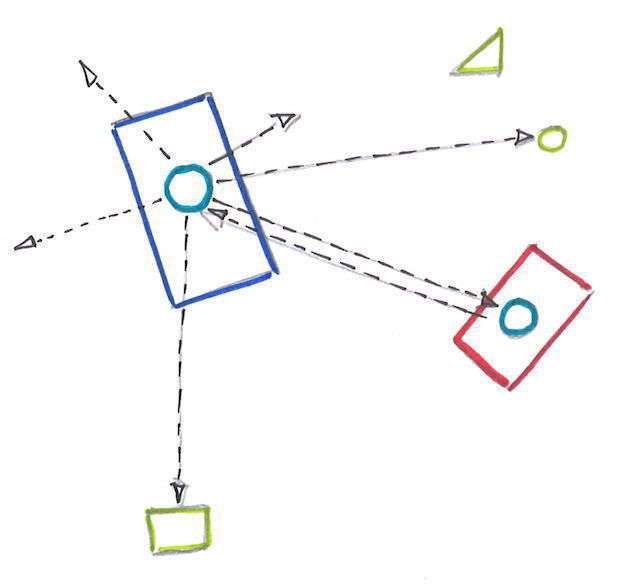
Top view :
Warning
Your robot need to know only the position of the opponent and not the position of the other elements around him.
The result¶
All of the project works. I just need to accelerate the speed by changing the motor and all could be very fine. The distance need to be improved but, as it’s a modular conception, the sensor can be easily changed. I would like to try with a version of my sensor but in laser way, and Neil give me a very good reference of a TOF laser sensor : the vl53l0x. It could be a great replacement sensor and a different way to sense the distance.
As a conclusion I also put the slide from my presentation below and you can find the video of my presentation here.
