


Mechanical Design
Although the initial proposal for the project was to
develop a 3D printing head for clay/ceramics, there
have been some issues, particularly in terms of time
management/availability; therefore, I'll report here
another project that I have developed and where many
of the tools covered in the FabAcademy have been used:
A hexapod robot called Cyclops.
The design of its structure went through several
revisions but was always based on similar concepts:
1. each leg should have two degrees of freedom, and
2. the servomotors used should also play a
structural function, minimizing the overall size of
the hexapod.
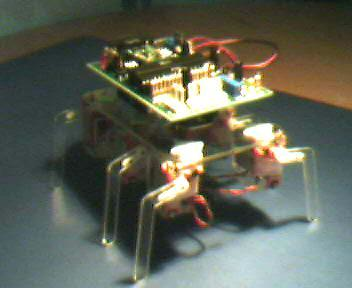
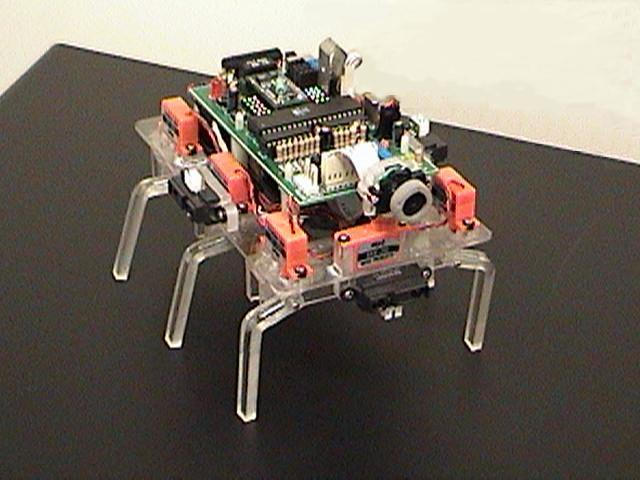
The first attempt achieved the simplicity and
compactness but the motors were inadequate for the
load that the robot required. A photo of the early
design can be seen below next to the model in Solid
works.
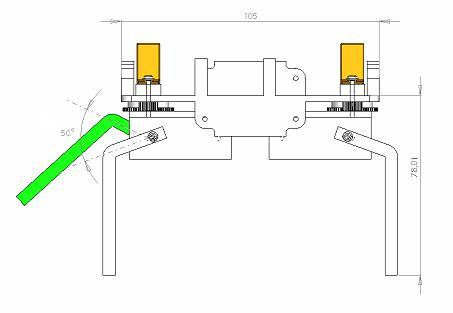
Despite having a fairly simple and compact design,
the motors had a lot of problems maintaining the
standing position, and it was noted that most of the
range of motion of each servo was being wasted
because each articulation of the leg did not move
the 180 degrees which is roughly the range of motion
of the servo. Gears were used to provide more force
in each leg while maintaining an acceptable range of
motion.
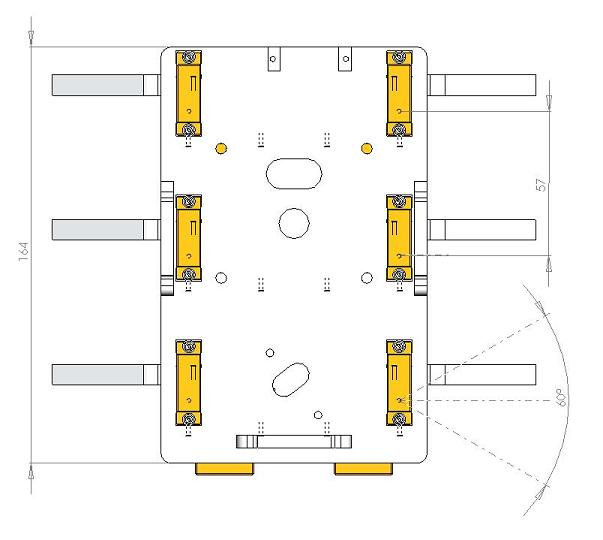
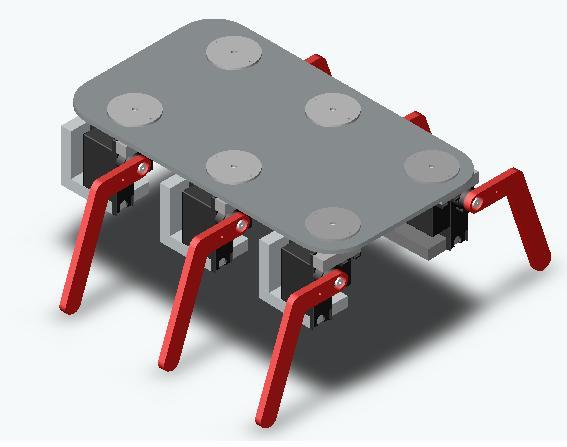
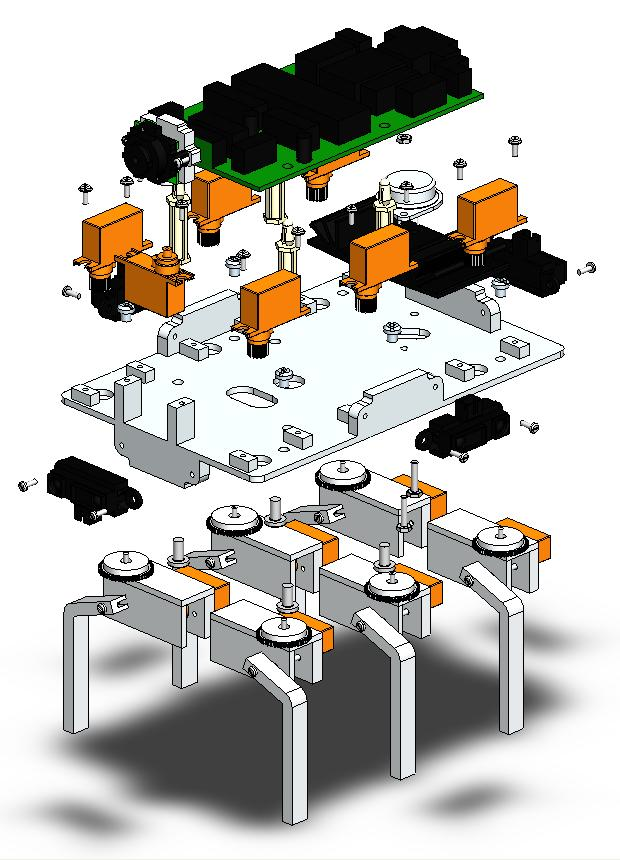
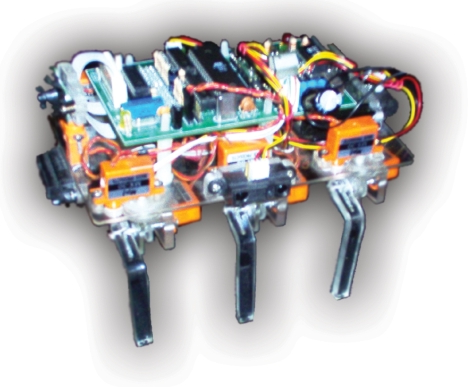
This new version was completed according to those
objectives chosen. An explosion view of the final
assembly can be seen below.
Progress
- Project Proposal
- 2D and 3D Model
- Laser Cut
- Circuit Making - FabISP
- 3D Scanning and Printing
- Electronics design
- Make Something Big
- Embedded Programming
- Molding and Casting
- Input Devices
- Composites
- Output Devices
- Networking
- Mechanical Design
- Interface
- Applications
- Invention
- Project Development
- Project Presentation
Alvaro J. Rojas Arciniegas, PhD
Assistant Professor Department of Automatics and Electronics - UAO
+57 (2) 318-8000 ext. 11384
