
This week I am programming the motors. We have decided to go with Gestalt. From Ilan Ellison Moyer´s Master's thesis "Gestalt is an accessible and flexible control framework which aims to augment the ability of individuals to create new automated tools, and to thus self-extend their abilities to create objects which would be too tedious or impossible to create by hand." A good place that helps to get started is this tutorial from fabacademy
To Do
- Prepare the environment for using Gestalt nodes
- First test
- Do the programming and testing
The "Doing"
Programming environment


Preparing and testing
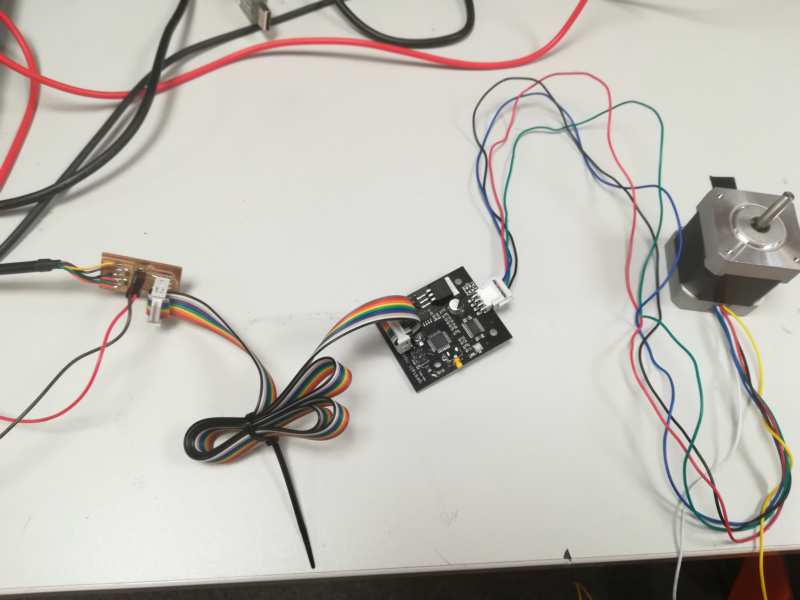
Physical layer is called Fabnet, "a multi-drop network, meaning that multiple modules (a.k.a. nodes) share a single set of communication wires. Signalling is differential based on the RS-485 specification." It is implemented with an RS485 bus. A bridge between it and fabnet is needed. Luckily, there was already a board prepared from last year. So I prepared the setting to test first just one motor:
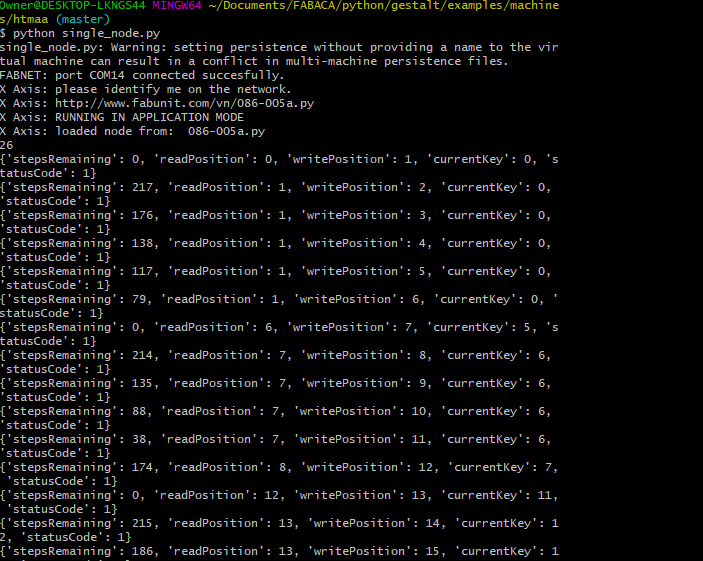
 And prepared to run the
And prepared to run the single_node.py example. I just had to change the portName at the def initInterfaces(self) of the virtualmachine with my COM port number which was COM13 most of the timesAt first it was not working. I checked, double checked, triple checked I had downloaded all the code needed and that I had the pins correctly connected. Nothing. I was almost sure it should be a connection, but not idea where. I could not get the blue led tinkle. I was very frustrated because it everything seemed to be very straightforward, but I got stuck in this point. Finally, another eyes (Jari) spotted the incorrect connection. And it worked as expected: blue led started tinkling, I pressed the buttonon the node to set it as the axis and it moved!

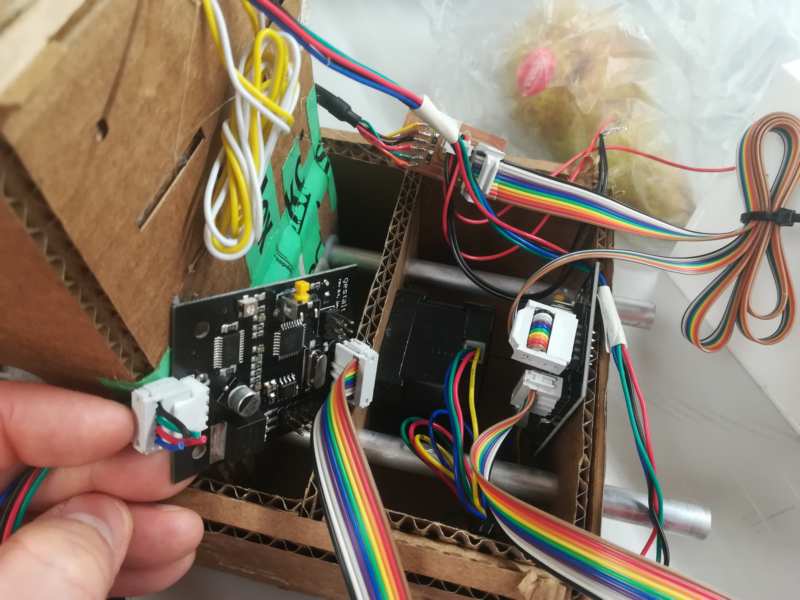
Programming the motors
 ... and started testing the
... and started testing the xy_plotter.py example.
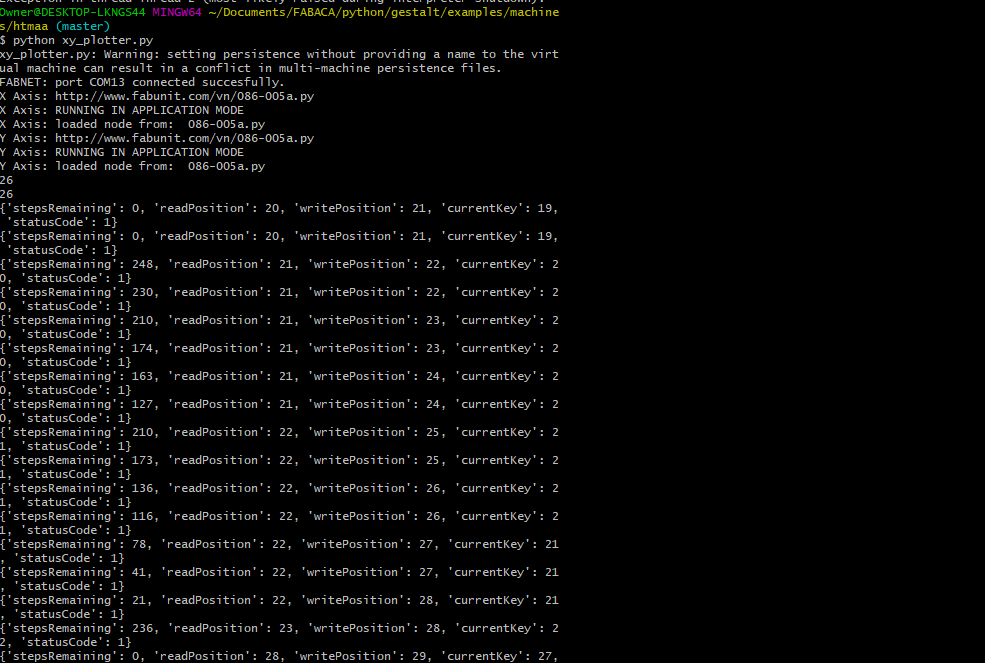 I then started to modify that code. I started looking to the output screen, trying to understand what was going on. Then, I set different points, first trying to adjust the horizontal movement to the actual length we needed. Then, I set different speeds for each node, testing them to see what worked better. Finally, setting the same slow velocity to both nodes (finally 2), was working better.
I then started to modify that code. I started looking to the output screen, trying to understand what was going on. Then, I set different points, first trying to adjust the horizontal movement to the actual length we needed. Then, I set different speeds for each node, testing them to see what worked better. Finally, setting the same slow velocity to both nodes (finally 2), was working better.
First demo with motors
Fruit Peeler Team from Marta on Vimeo.
Resources
- Gestalt nodes and software
- this tutorial from fabacademy
- Corresponding assignment from Yrjö
Once done
Summary
- I have programmed the gestalt nodes
- I have done documentation on the page and organized the layout
- I have participated in testing different solutions for the blades
- I have participated in testing different solutions for holding the fruit
Difficulties
- Main difficulty was a small but time consuming one: find the wrong cable when the gestalt motors were not working at first
Files
- python code for the machine adapted from example xy_plotter.py