Final Project Proposal: Autonomous Robotic Arm
For my final project in Fab Academy, I plan to design and build a fully functional robotic arm entirely from scratch. My goal is to take full advantage of the skills I have learned throughout the course — from electronics and PCB design to mechanical fabrication and programming — and integrate them into a single complex system.
The robotic arm will be capable of performing precise, repeatable movements across multiple joints, making it suitable for tasks such as picking and placing objects, simple assembly operations, and demonstration of autonomous control. Every single component — mechanical, electronic, and software — will be designed and built by me from the ground up.
Project Components
Mechanical Structure
I aim to design the robotic arm with multiple degrees of freedom, allowing it to perform precise movements. I plan to fabricate all structural parts myself using CNC milling, laser cutting, and 3D printing, depending on the component requirements. This will give me control over both durability and weight, which are critical for the arm's performance.
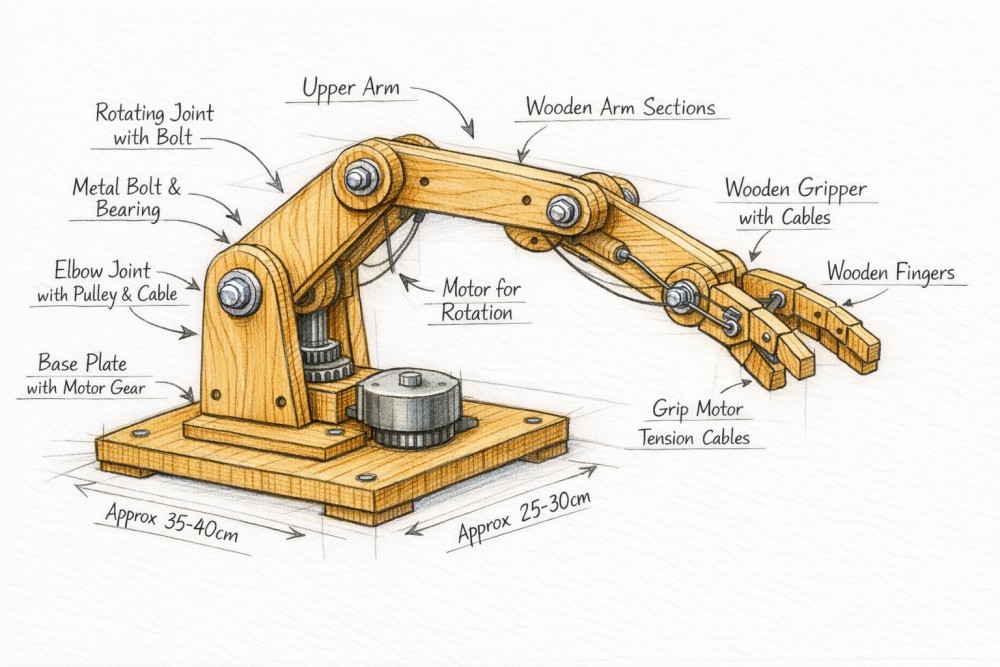
The arm will consist of a base rotation joint, a shoulder joint, an elbow joint, and a wrist joint, giving it enough range of motion to reach objects in a defined workspace. Each joint will be carefully designed to minimize backlash and flex, which directly affects the accuracy of the arm's movements.
All parts will be modeled in CAD software before fabrication, allowing me to test fit and clearances digitally before committing to physical production.
Electronics and Control
I want to design and produce my own custom PCBs to control the motors and sensors of the robotic arm. This will include motor drivers, microcontrollers, and feedback circuits, allowing the system to operate smoothly and respond to commands accurately. Designing the electronics myself ensures full customization and a deep understanding of how every part of the system interacts.
The main control board will be based on a microcontroller that handles real-time motor step generation, sensor reading, and communication with a higher-level controller or PC. I will also design separate driver boards for each stepper motor, keeping the system modular and easy to debug.
Power management will also be an important part of the electronics design, as stepper motors can draw significant current and require stable voltage regulation to operate reliably.
Motors Selection
For the motors of my robotic arm, I have chosen to use stepper motors. I chose stepper motors because they offer precise position control by design — each pulse sent to the motor corresponds to a fixed angle of rotation, which makes them perfect for controlling the joints of a robotic arm without needing complex external feedback systems.
Stepper motors also have strong holding torque, meaning the arm can hold its position even when no movement command is given. This is very important for a robotic arm that needs to stay stable while performing tasks.
Currently, I have already designed and manufactured the gearboxes for the arm. The gearboxes are a critical part of the mechanical system — they reduce the output speed of the stepper motors and multiply the torque, which allows the joints to handle real loads during operation. Designing the gearboxes myself gave me a much deeper understanding of gear ratios, mechanical tolerances, and load distribution.
The next step in my build process is to design and fabricate the body and structural frame of the manipulator. This frame will connect all the joints, hold the motors and gearboxes in place, and define the overall shape and reach of the arm. I plan to use a combination of 3D printing and CNC milling to achieve both precision and strength in the structure.
Integrating the stepper motors will involve designing dedicated stepper motor driver circuits on my custom PCBs and writing control firmware that manages step timing, direction, and speed for each joint independently.
Sensors and Feedback
To make the robotic arm intelligent and responsive, I plan to integrate sensors such as position encoders, limit switches, and possibly force sensors. These will allow the arm to detect its own position and react to external conditions, which is important for precise manipulation tasks.
Limit switches will be used at the home position of each joint so the arm can perform a homing sequence at startup and always know its absolute position. Position encoders will provide real-time feedback on joint angles, allowing the software to correct any missed steps or mechanical drift over time.
If time allows, I would also like to add a simple gripper with a force sensor at the end effector, so the arm can detect when it has successfully grasped an object without applying too much force and damaging it.
Software and Programming
Finally, I will develop the software to control the arm, including both low-level motor control and high-level task execution. I plan to experiment with basic automation routines and perhaps some simple AI-based control to allow the arm to perform complex movements.
The software will be structured in layers. The lowest layer handles direct stepper motor control — generating step pulses, managing acceleration and deceleration profiles, and reading sensor inputs in real time. The middle layer handles joint kinematics, translating desired arm positions into specific motor commands for each joint. The top layer will handle task sequencing — defining what the arm should do and in what order.
I also plan to build a simple interface that allows me to manually control each joint for testing and calibration, and to record and replay movement sequences for demonstration purposes.
Timeline and Current Progress
- Gearboxes — completed. All gearboxes have been designed and manufactured.
- Stepper motor selection — completed. Motors have been chosen based on torque and step resolution requirements.
- Manipulator body and frame — in progress. This is the current stage of development.
- Custom PCB design — upcoming. Will begin after the mechanical structure is finalized.
- Firmware development — upcoming. Will be developed in parallel with electronics.
- Sensor integration — planned for the final assembly phase.
- Full system testing — planned for the last weeks before the final presentation.