Mechanical Design
Week 14
6th-13th May 2014
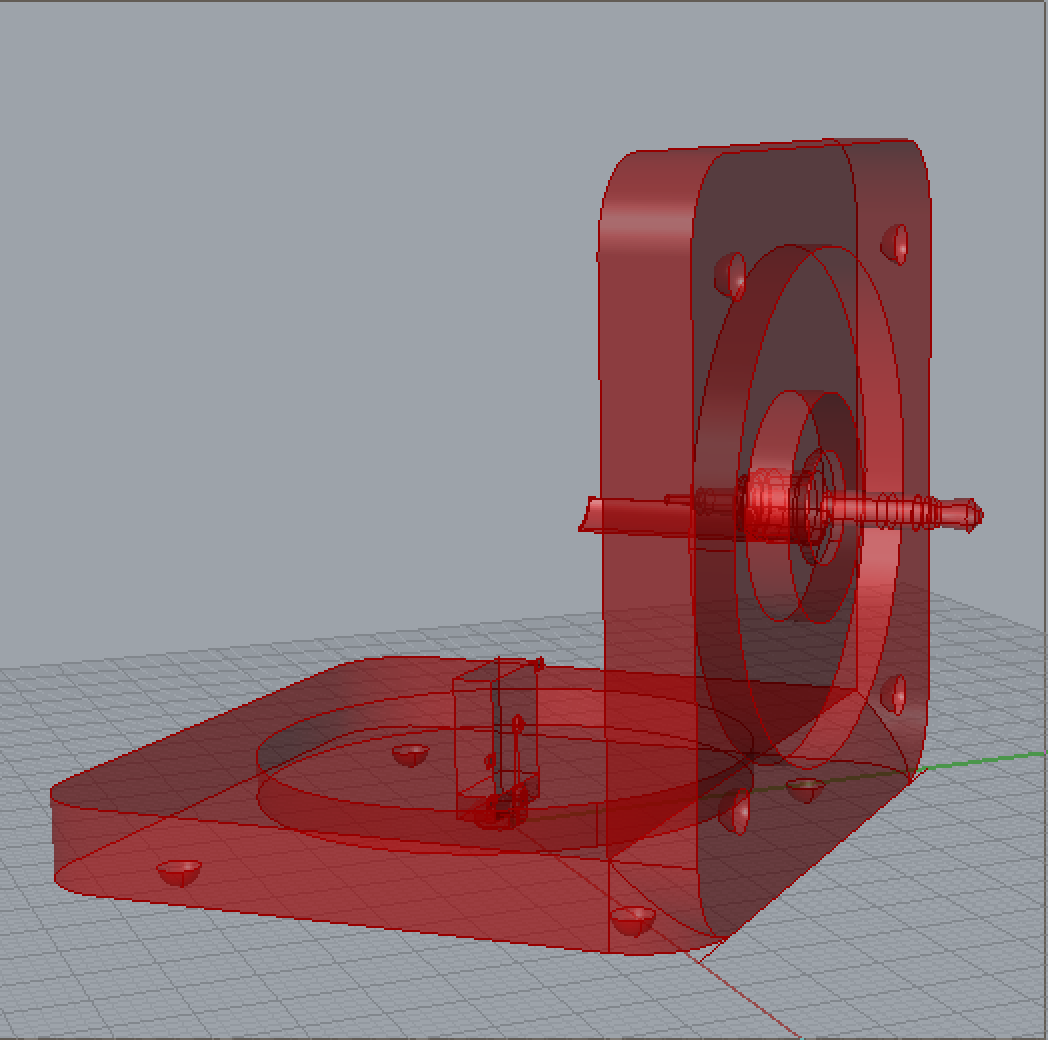
The mechanical design for Zmeika relies on two main solutions. 2.5mm TRRS jacks as low-cost sliprings and plastic angular modules. During the prototyping phase the modules will be as physically open as possible to allow easy access to the electronics, but in the final version they will be concealing virtually all of the electronics components, besides the IR sensors.
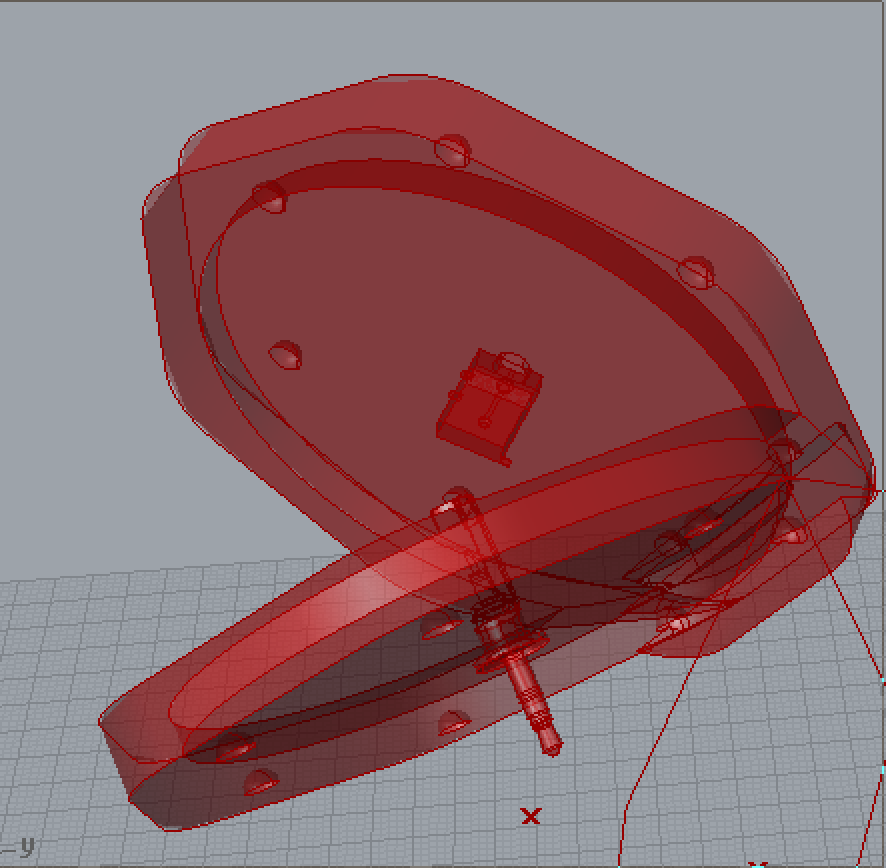
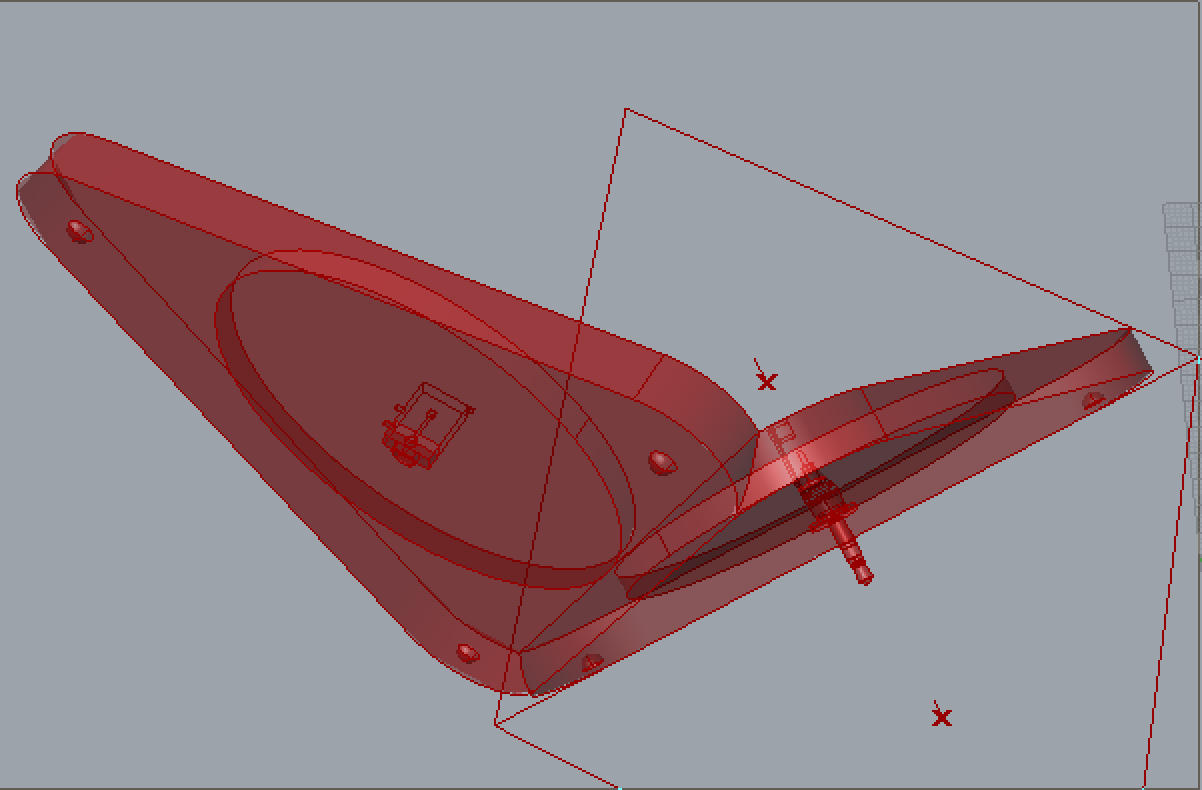
Standard Rubik's snake is made of straight triangle prisms with square faces, but it might be interesting to experiment with other shapes. To be able to quickly test various shapes and dimensions I made a parametric model in Grasshopper. It's not perfect, but and the models need some cleanup after baking, but it does significantly cut down design time when changing from a 3-sided to 7-sided module.
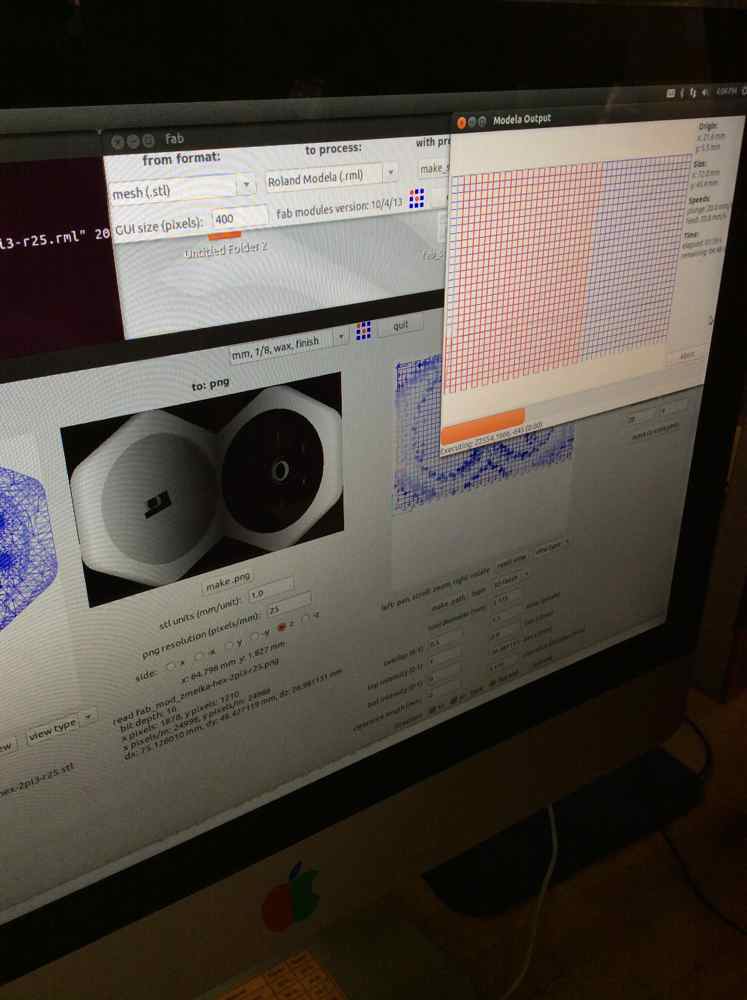
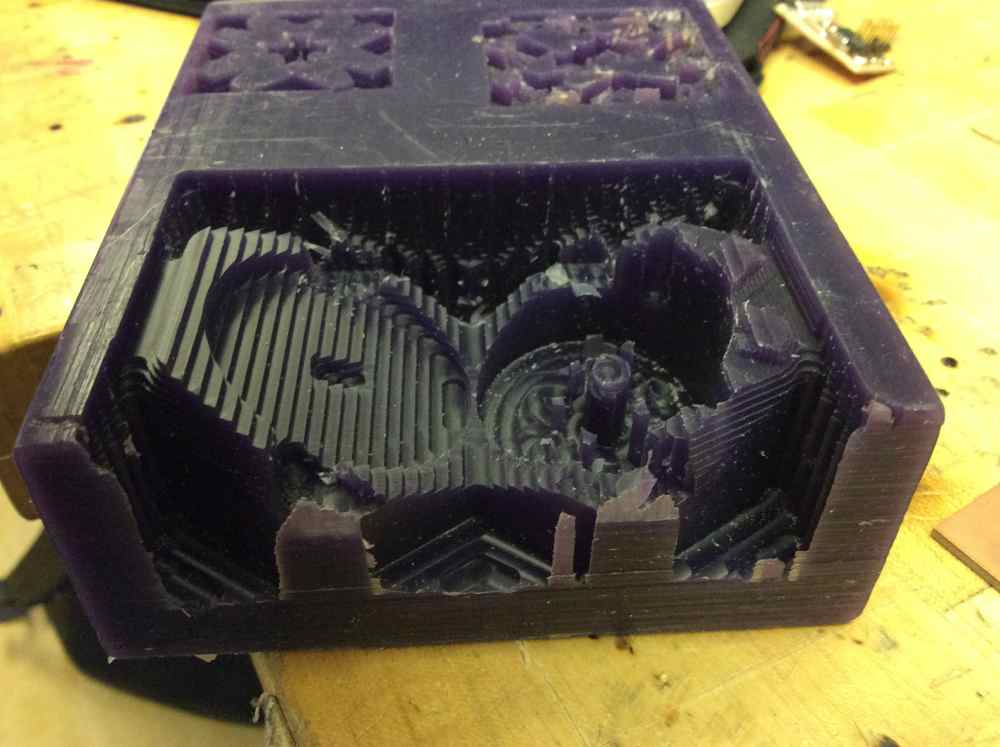
First attempt at milling molds for the modules wasn't quite a success due to the model missing a polygon, thus not being watertight and thus FabModules failing to interpret it properly. The generated png image did look strange, but I wasn't quite sure what to make of it for the first time.
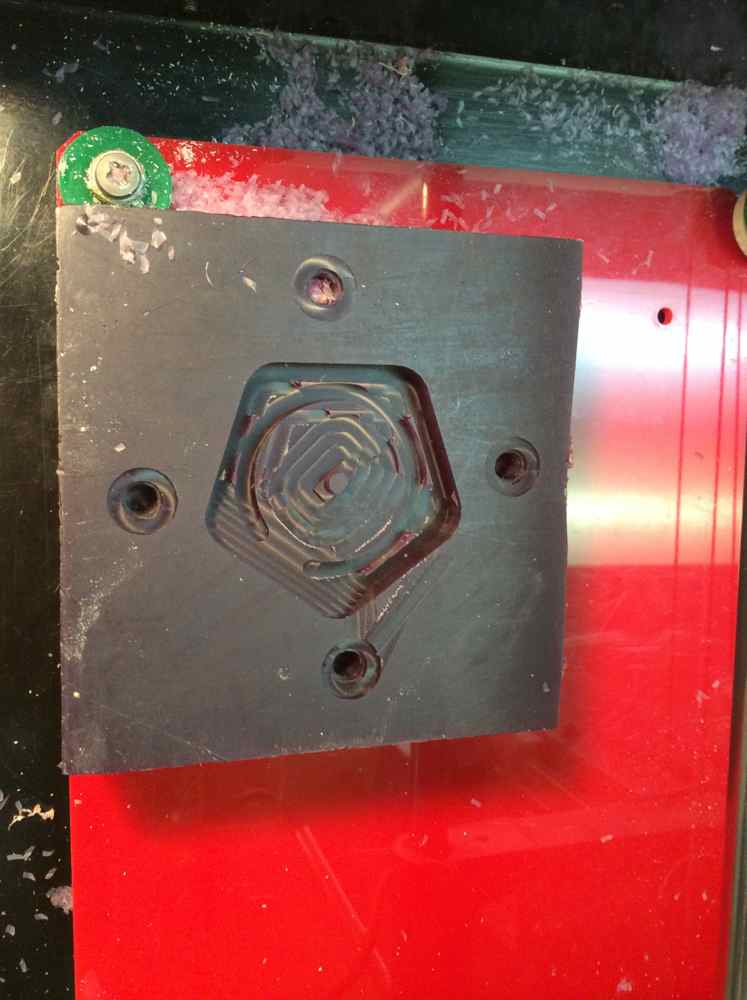
Second attempt was better, but one error had to be corrected - the part was milled 2mm deeper than intended. Shaving off those 2mm took another 20 mins and finally the first half-mold was there.
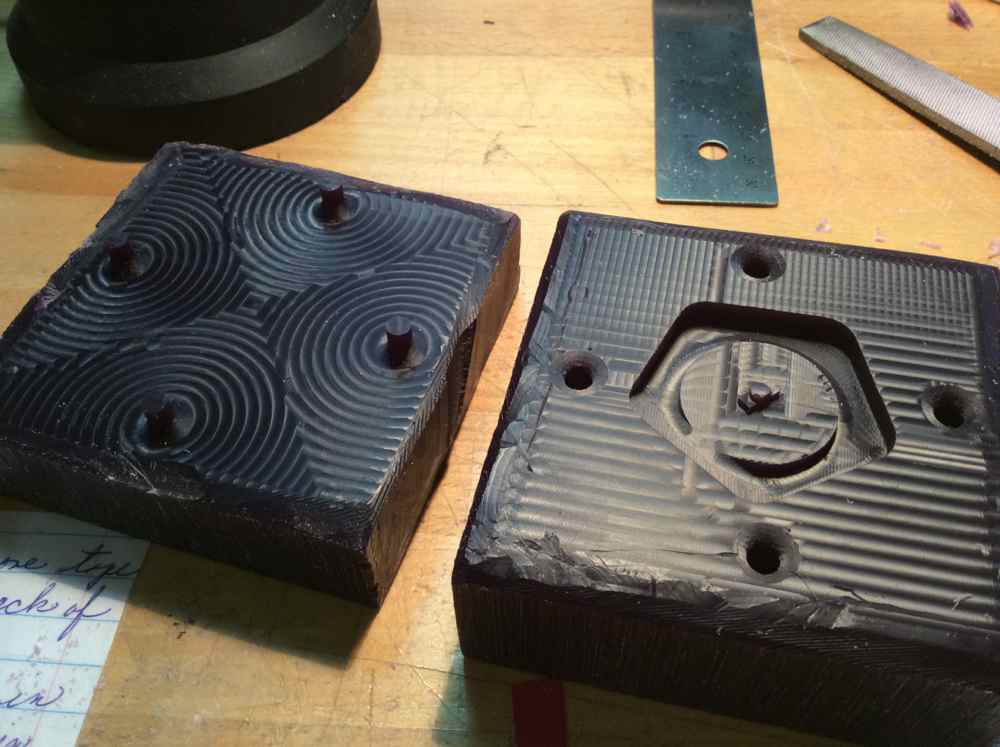
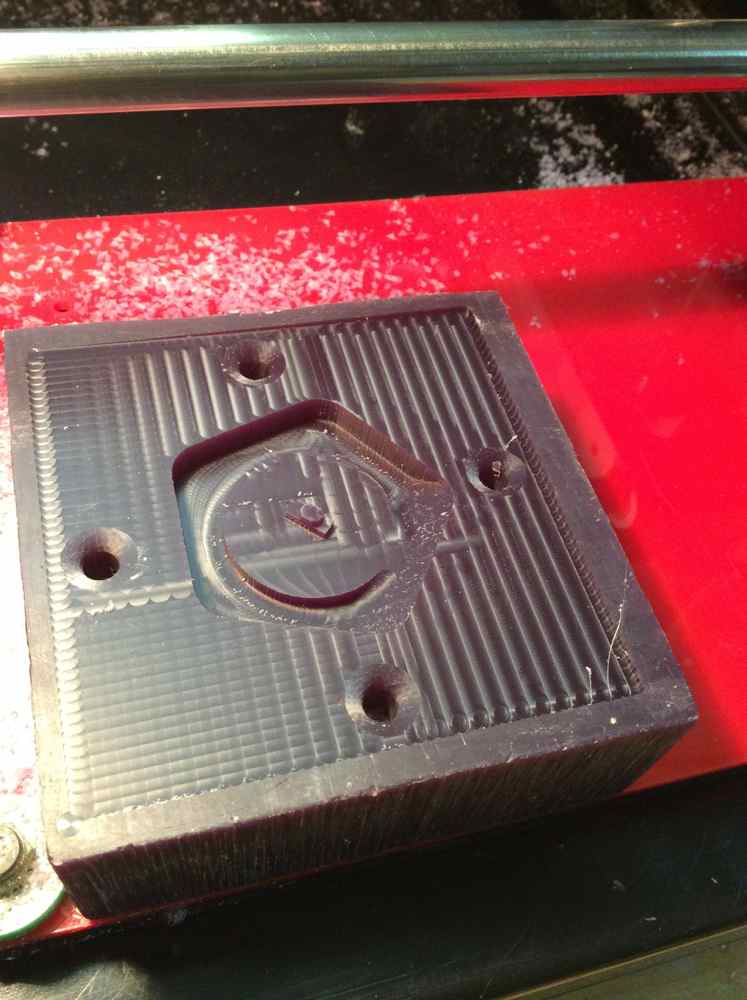
Milling the second half of the mold was already a pretty straightforward job. In about an hour it was complete as well.
Rhino files for this week:
