



Output devices
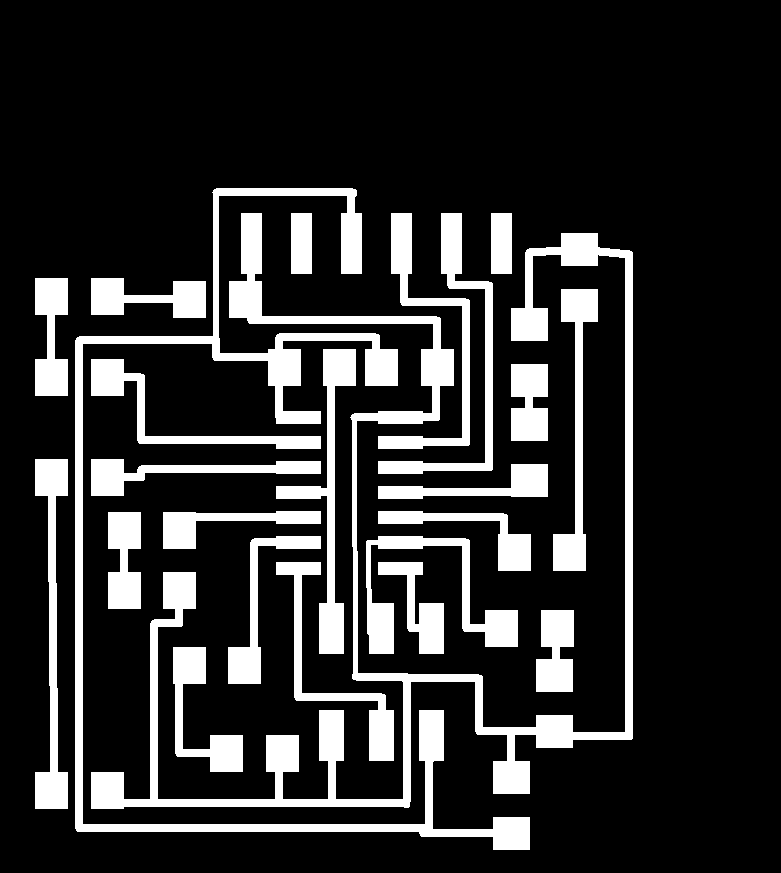
This week I decided to start working on the code and board I will need for my final project.I started to make a schema ,for my input I will use a motion sensor to detect wen the ball will stop moving.
for my output I will need a speaker,several leds and a small motor.
I started with an Arduino code that will make a wavy sound as I play with the sensor
{kind=link}
{kind=link}
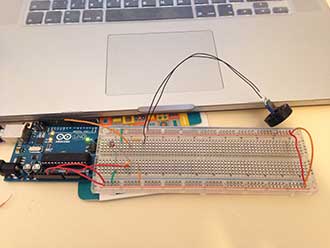
Mill the board and solder the components on it.
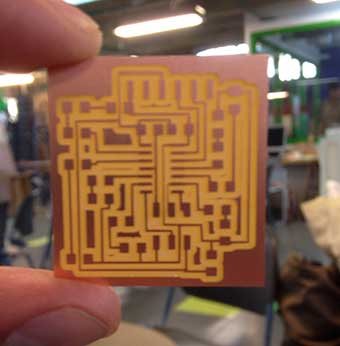
I used sokets for the piezo sensor and motor and pin for the speaker .
I conected the FTDI and the AVR to the board and borend the botloder. then check the pin nombers.
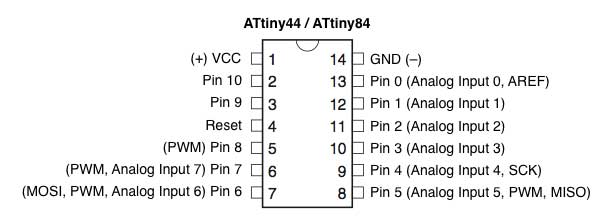
And burn the code on the Attiny 44.
// - LEAD MELODY
int cycVec[] = { 1136,1136 ,1073, 1073, 1276, 1276, 1073, 1136, 1136, 1136, 1073, 1073, 1701, 1805, 1136, 1805, 1515, 1515, 1433, 1433, 1701, 1701, 1433,1515, 1136, 1136, 1073, 1073, 1276, 1276, 1073, 1136,1276,1136};
int noteDurations [] = { 440 ,220 ,466 , 466 , 392, 392, 233, 1320, 440 ,220, 466, 466, 294, 277, 220, 554, 330, 165, 349, 349, 294, 294, 174, 990 , 440, 220, 466, 466, 392, 392, 233, 220, 196, 440, 220, 220};
int noteLength = 34;
int delayInBetween = 3;
int BPS = 10;
// this constant won't change:
const int piezoPin = 2; // the pin that the piezo is attached to
const int motorPin = 3; // the pin that the motor is attached to
long motorTime = 0;
int piezoState = 0;
int ledOne= 10;
int ledTwo= 9;
int ledThree= 4;
void setup() {
pinMode(piezoPin, INPUT); // initialize the button pin as a input:
pinMode(motorPin, OUTPUT);
pinMode(ledOne, OUTPUT);
pinMode(ledTwo, OUTPUT);
pinMode(ledThree, OUTPUT);
// initialize serial communication:
int speaker =7;
pinMode(speaker, OUTPUT);
for (int m=0;m {
noteDurations[m] = (noteDurations[m])/BPS;
//pauseDuration[k] = pauseDuration[k]*1000;
}
}
void loop() {
// piezoState = digitalRead(piezoPin); // read the pushbutton i
// Serial.println(piezoState);
int speaker =7;
int temp;
int cycNum;
int cyc;
if ( motorTime == 0 ) {
if ( detectMovement() ) {
digitalWrite(motorPin, HIGH);
delay(5000);
digitalWrite(motorPin, LOW);
delay(400);
digitalWrite(ledOne, HIGH);
delay (30);
digitalWrite(ledTwo, HIGH);
delay(300);
digitalWrite(ledThree, HIGH);
delay (300);
digitalWrite(speaker, LOW);
digitalWrite(ledOne, LOW);
digitalWrite(ledTwo, LOW);
digitalWrite(ledThree,LOW);
for (int thisNote = 0; thisNote {
for (int i=0;i {
digitalWrite(speaker, HIGH);
digitalWrite(ledOne, HIGH);
digitalWrite(ledTwo, HIGH);
digitalWrite(ledThree, HIGH);
delayMicroseconds(cycVec[thisNote]);
digitalWrite(speaker, LOW);
digitalWrite(ledOne, LOW);
digitalWrite(ledTwo, LOW);
digitalWrite(ledThree,LOW);
delayMicroseconds(cycVec[thisNote]);
}
}
}
}
else {
if ( (millis()-motorTime)>10000 ) {
motorTime = 0;
digitalWrite(motorPin, LOW);
// startPlayback(sample, sizeof(sample));
}
}
}
You ken dawonlode the Arduino files
hare.Check evrithing workes on your board and make modefection in the code if nesasery.
Success.