13. Output devices¶
This week I worked on controlling motor speed and direction.
Requirements for this project¶
the requirement for this project is to add an output device to a microcontroller board that I have designed, and program it to do something.
-
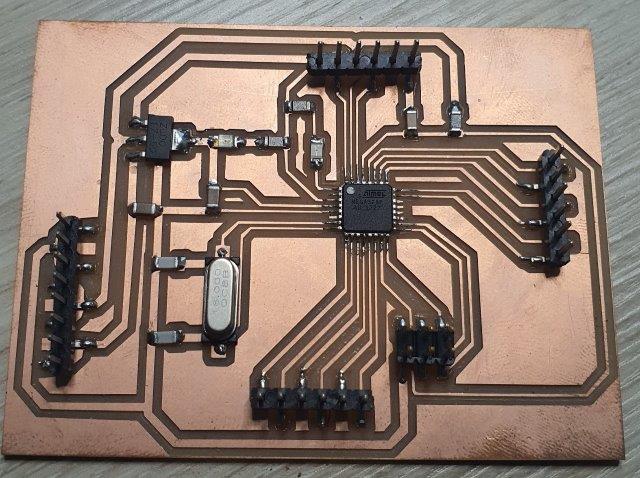
I used my microcontroller which I have designed and build in Electronics Design Week
-
Batteries

-
Raspberry Pi

-
Touch Screen


Wiring¶
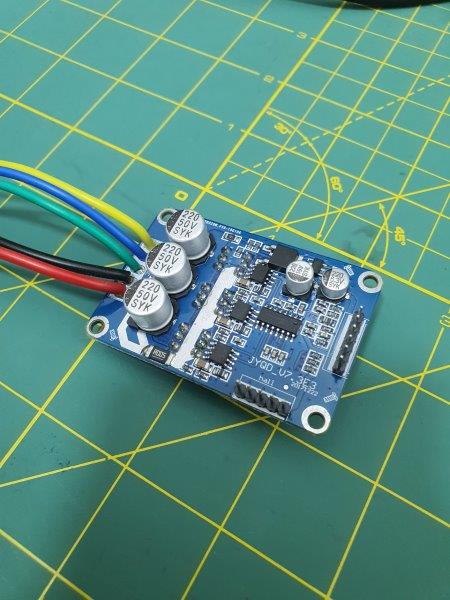
- Connect motor to motor Driver

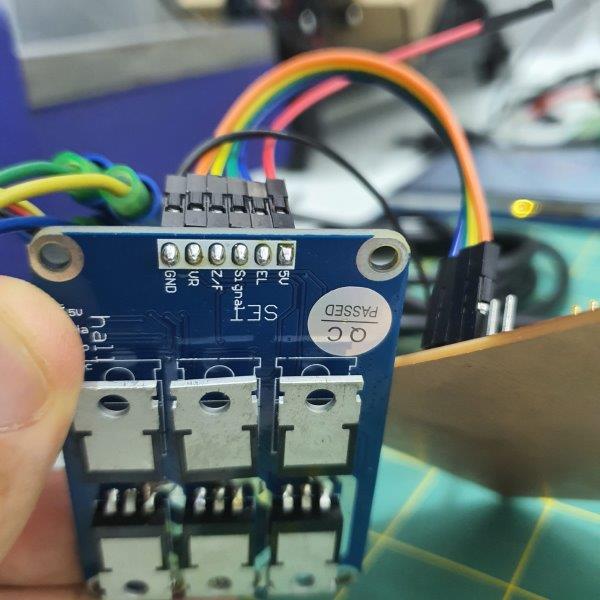
- Connect motor driver to microcontroller.
|Motor driver Pin |Microcontroller Pin|
|------------------|------------------|
|VR |D5 |
|Z/F |D6 |
|Signal |D7 |
|EL |D8 |
|GND |GND |
|5V |5V |
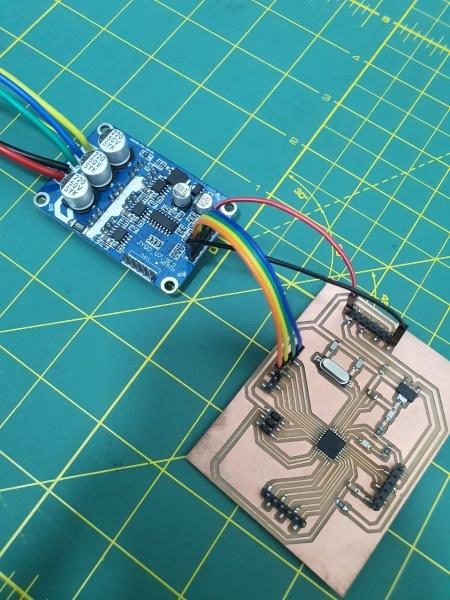
- Connect microcontroller to raspberry PI with FTDI cable.
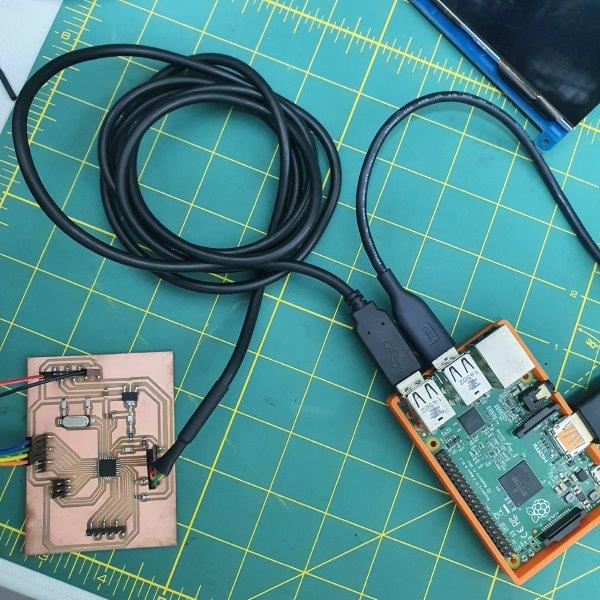
- Connect touch screen to raspberryPi with USB and HDMI cable.

Programing¶
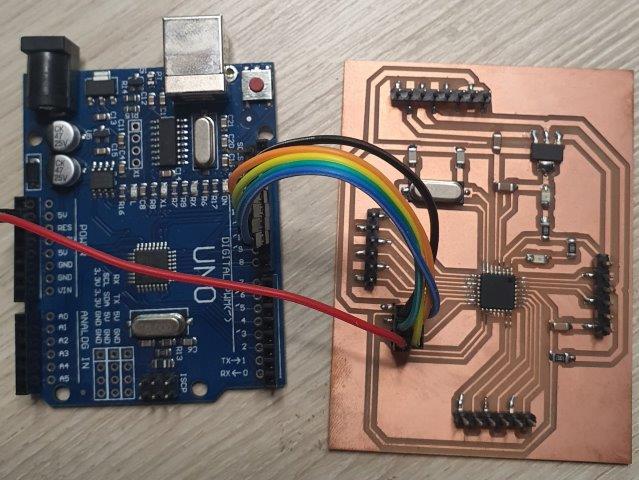
- To program the microcontroller I have used Arduino UNO board connected with ISP header of the microcontroller.
| Arduino UNO Pin # | Microcontroller ISP Port |
|---|---|
| 12 | 1-MISO |
| 5V | 2-VCC |
| 13 | 3-SCK |
| 11 | 4-MOSI |
| 10 | 5-RST |
| GND | 6-GND |
- Open Arduino IDE and go to File >> Examples >> Firmata >> StandardFirmata
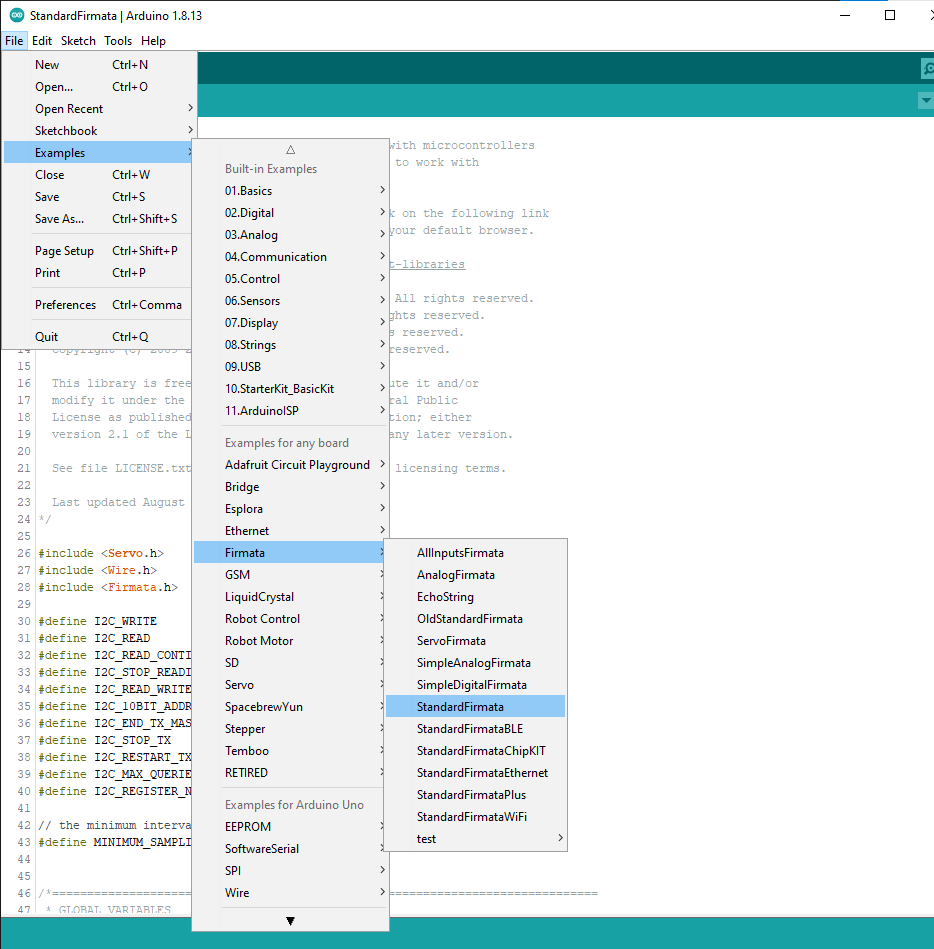
Firmata is a protocol for communicating with microcontrollers from software on a computer. For more details you can check the GitHub page - To program the microcontroller go to Sketch and clink on Upload Using Programmer
-
Open Raspberry Pi terminal and install pyfirmata library for python by running the following command
pip install pyfirmata
-
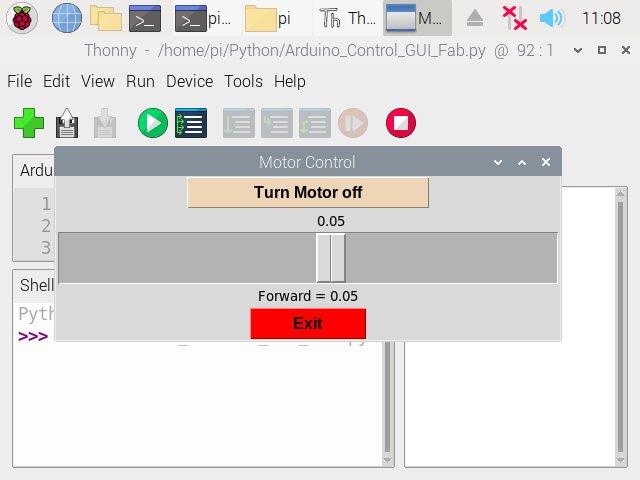
Open any Python Editor and write the following python code to control the motor
from tkinter import *
import tkinter.font
from time import sleep
from pyfirmata import Arduino, util
from pyfirmata import INPUT, OUTPUT, PWM
arduinoPort = "/dev/ttyUSB0"
board = Arduino(arduinoPort)
sleep(2)
pin3 = board.get_pin("d:3:o") # LED Pin
motorPin = board.get_pin("d:5:p") # PWM pin connected to LED
motorEL = board.get_pin("d:8:o") # Motor Enable
motorZF = board.get_pin("d:6:o") # Motor Direction
win = Tk()
win.title("Motor Control")
myFont = tkinter.font.Font(family = "Helvetica", size =12, weight = "bold")
def ledToggle():
if ledButton["text"] == "Turn Motor off":
pin3.write(0)
motorEL.write(0)
ledButton["text"] = "Turn Motor ON"
else:
pin3.write(1)
motorEL.write(1)
ledButton["text"]= "Turn Motor off"
def close():
win.destroy()
def speed(val):
val = float(val)
if val <0:
val = abs(val)
motorZF.write(0)
selection = "Backward = " + str(val)
elif val >0:
motorZF.write(1)
selection = "Forward = " + str(val)
else:
selection = "Stop"
label.config(text = selection)
motorPin.write(val)
sleep(0.01)
ledButton = Button(win, text="Turn Motor ON", font=myFont, command=ledToggle, bg="bisque2", height=1, width=24)
ledButton.grid(row=0,column=1)
var = DoubleVar()
speedScale = Scale(win, from_=-0.5, to=0.5, resolution = 0.05, variable = var, command = speed, orient=HORIZONTAL, length = 500, width = 50 )
speedScale.grid(row=1,column=1)
label = Label(win)
label.grid(row=2, column = 1)
exitButton = Button (win,text = "Exit", font = myFont, command = close, bg = "red", height = 1, width = 10)
exitButton.grid(row=10,column=1)
win.protocol("WM_DELETE_WINDOW", close)
win.mainloop()
-
You can download the full python code from here
-
Run the python code
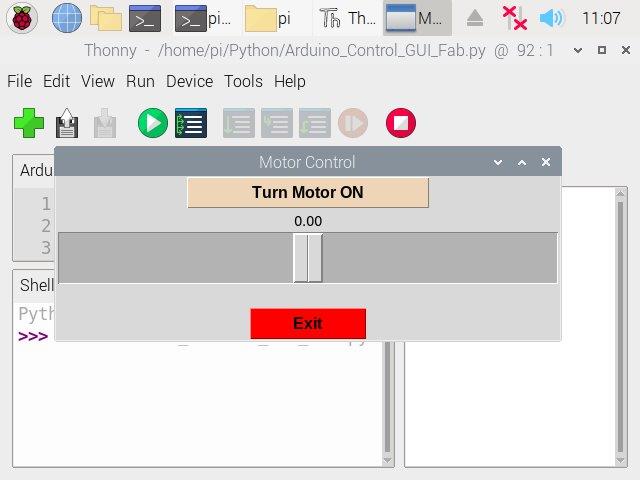
-
Click on Turn Motor ON and move the slider to control the motor speed and direction
This is how it works:
Useful links¶
Group assignment:¶
Measure the power consumption of an output device Document your work (in a group or individually)
For the Group Assignment, I’ll measure the power consumption for the motor. which will be used for my final project.
I have installed Two motors in my Robot and check the current consumption.
- First test in desk without load.
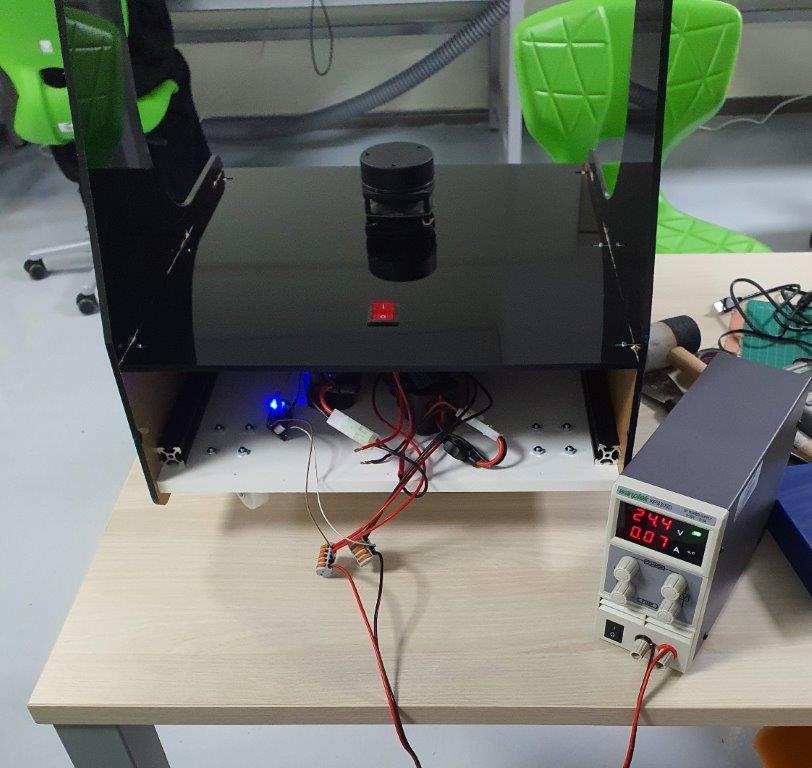
Power = Current x Voltage = 0.07A x 24.4V =1.708W
Power for each motor = 1.708 / 2 = 0.854W
- Second test with load and robot moving in the floor.
Power = Current x Voltage = 0.27A x 24.4V =6.588W
Power for each motor = 6.588 / 2 = 3.294W