-
00. FA20 Hyunho
-
01. Principles and Practices, Project management
-
02. Computer-Aided design
-
03. Computer controlled cutting
-
04. Electronics production
-
05. 3D Scanning and printing
-
06. Electronics design
-
07. Computer controlled machining
-
08. Embedded programming
-
09. Input devices
-
10. Applications and implications
-
11. Output devices
-
12. Interface and application programming
-
13. Invention, intellectual property, and income
-
14. Networking and communications
-
15. Molding and casting
-
16. Wildcard week
-
17. Mechanical design, Machine design
-
18. Project development
-
19. Final Project
Week8
Embedded Programming
Group Assignment Link
Assignment
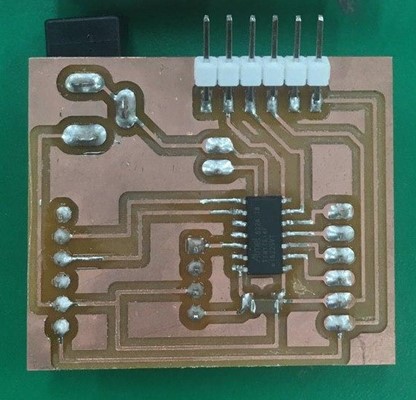
I will programming the Attiny1614 board that i made
[Window OS]+[Arduino IDE]+[c/c++]+[UPDI]+[Attiny1614]
I need to check the Datasheet and select the appropriate MCU for my development board
Datasheet allows you to select the MCU for your board
[Attiny1614 Datasheet Link]
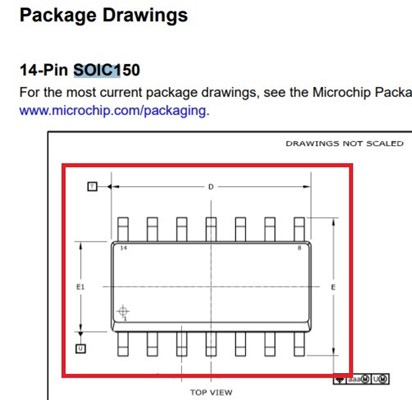
I checked the drawing package on the data sheet.
I chose attiny1614 because it is easy to soldering because of the wide space between launches
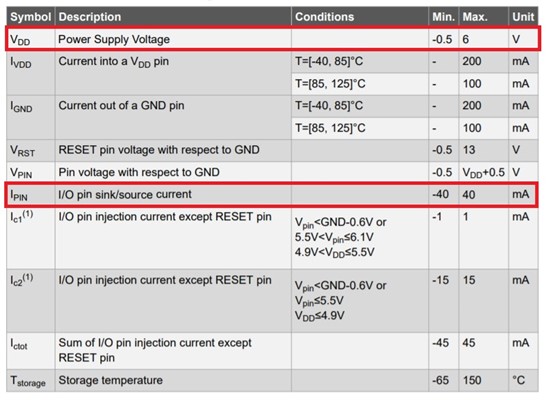
Absolute Maximum Ratings
I've confirmed that we can't give you more than 6v of voltage,
and we can only allow up to 40 mA of each pin
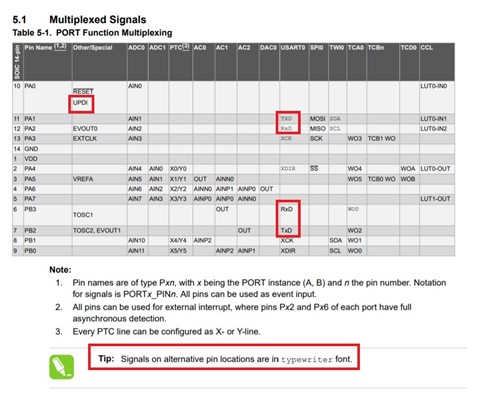
PORT Function Multiplexing
We can confirm that PA0 is UPDI.
You can check which TX,RX pin can be used instead of PA1,PA2
Attiny 1614 pinout
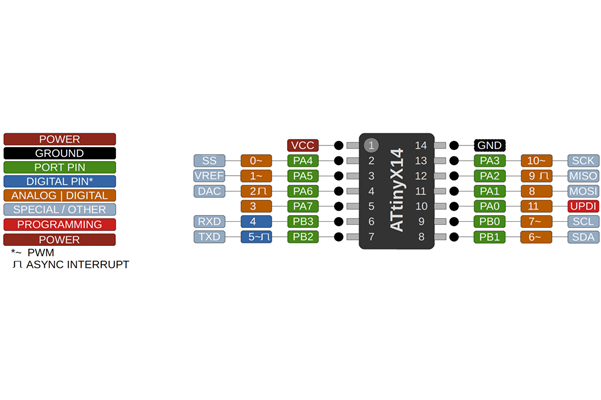
All I/O pins can be configured with internal pullup resistance
UPDI is used for the next generation Attiny MCU and is convenient because it can be coded with fewer pins than isp
It takes a while to load the program, but with just one pin and GND, you can program it
pin11 is UPDI
pin4, 5 > FTDI
pin7, 6 > Dust sensor
pin8, 9 > Humidifier
pin 0,1,2,3 is left for for LED
The Beginning of Arduino
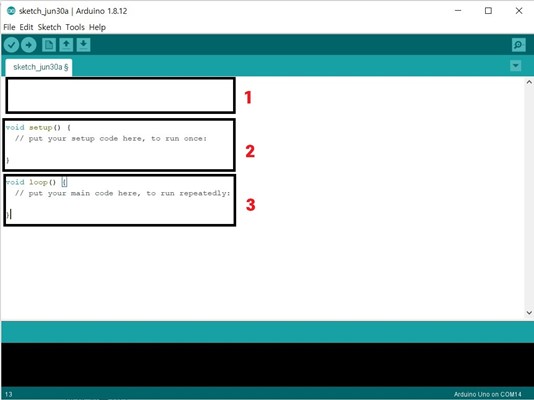
1.pre-processor
A sentence that is pre-processed before compilation
Used to make source programs easy to change and compile
#include, #define, #error, #if, etc
2.setup()
The part where data is initialized
In the setup() function, the statement runs only once at first start,
so it usually writes commands such as setting up Arduino hardware,
resetting sketch variables, and declaring variables
3.loop()
Function that executes a statement over and over again
The command statement within the loop() function is a function that runs from beginning to end unless it is stopped or de-energized,
so the code that controls the actual behavior of the aduino is written in this loop() function
pinMode (pin, INPUT or OUTPUT);
Pin mode is a function that informs the compiler whether to use each pin of the input-output pin (0-13) as input or output
digitalWrite (pin, HIGH or LOW);
It is a function that outputs a status value on a set pin when the input-output pin (0-13) is defined as an output
delay (time);
a function that delays time by a certain amount of time
Serial.begin (communication speed);
Announce the beginning of serial communication
The parameter sets the transmission speed for serial communication at what bps (usually 9600)
Serial.println (output value);
Outputs data for serial communications
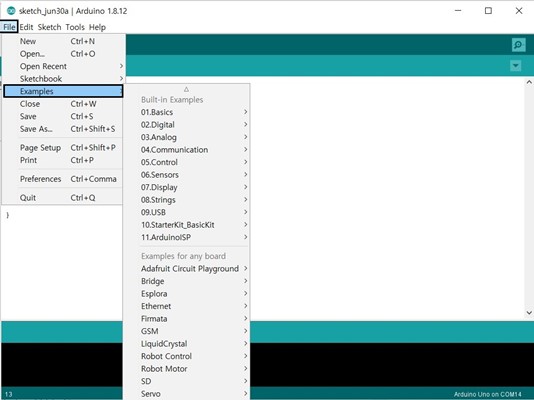
Reference Arduino example code
Use UPDI
In order to use UPDI, you need to turn the Arduino Uno Board into an UPDI programmer
First download this file [UPDi - jtag2updi.ino File]
After connecting Arduino Uno to the computer
Open the file above and upload it to the Uno board
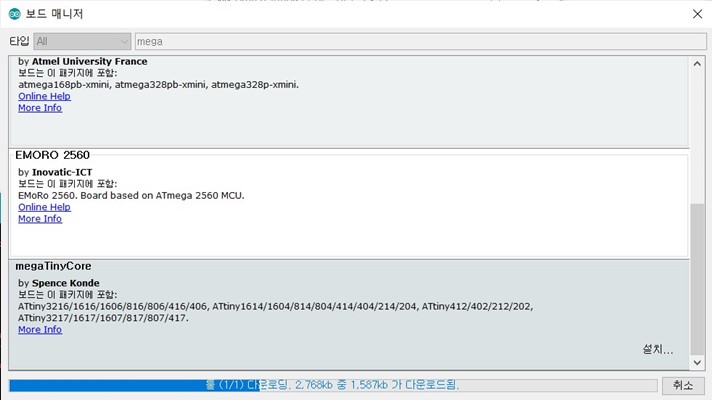
Search and install mega tiny core in the board manager
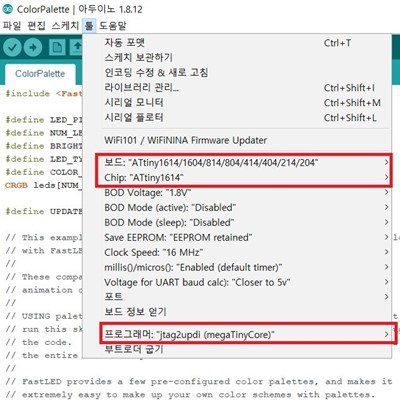
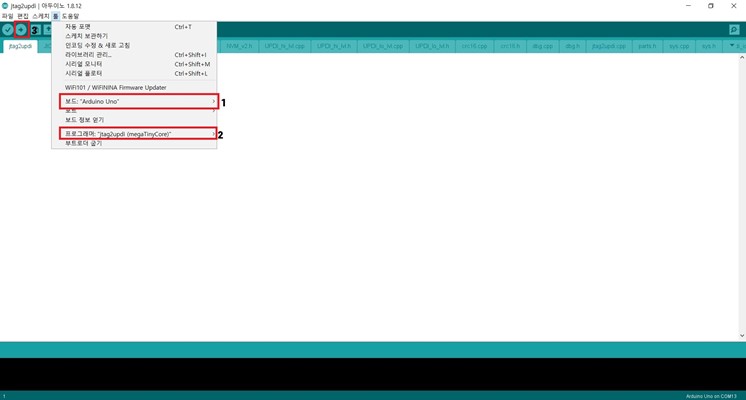
Seting Board Attiny 1614
Chip attiny 1614
programmer jtag2updi
I connect 6 pin of Arduino Uno and the updi on my board and program my board
Burn the bootroder before that
The Arduino code below was used in my final project
There are three example codes for each device
and Aduino example code control > ifstatement code is applied together
The file is at the bottom
Week 9 Dust sensor code
Week 11 Humidifier code
Arduino-ples-05.Control-IfStatementConditional/
//FA20 hyunho #include <Adafruit_NeoPixel.h> #ifdef __AVR__ #include <avr/power.h> // Required for 16 MHz Adafruit Trinket #endif #define NUM_LEDS 1 #define DATA_PIN 0 #define HUMIDIFIER 9 Adafruit_NeoPixel pixels(NUM_LEDS, DATA_PIN, NEO_GRB + NEO_KHZ800); #define DELAYVAL 500 // Time (in milliseconds) to pause between pixels #include <Arduino.h> #include <SoftwareSerial.h> //#include <FastLED.h> #define LENG 31 //0x42 + 31 bytes equal to 32 bytes unsigned char buf[LENG]; int PM01Value=0; //define PM1.0 value of the air detector module int PM2_5Value=0; //define PM2.5 value of the air detector module int PM10Value=0; //define PM10 value of the air detector module int neor=255; int neog=255; int neob=255; static int maxdust = 50; static int mindust = 0; SoftwareSerial PMSerial(6, 7); // RX, TX void setup() { pinMode(HUMIDIFIER, OUTPUT); pixels.begin(); // INITIALIZE NeoPixel strip object (REQUIRED) PMSerial.begin(9600); PMSerial.setTimeout(1500); pixels.setPixelColor(0, pixels.Color(255, 255, 255)); pixels.show(); digitalWrite(HUMIDIFIER, HIGH); delay(3000); pixels.setPixelColor(0, pixels.Color(0, 0, 0)); pixels.show(); digitalWrite(HUMIDIFIER, LOW); } void loop() { //Serial.print("loop:"); //unsigned int uptime = millis(); //Serial.println(uptime); measuredust(); int firstr=255; int firstg=120; int firstb=0; //ledgo(); if (PM2_5Value < mindust) {PM2_5Value = mindust;} if (PM2_5Value > maxdust) {PM2_5Value = maxdust;} firstr= map(PM2_5Value, mindust, maxdust, 255, 250); firstg= map(PM2_5Value, mindust, maxdust, 255, 120); firstb= map(PM2_5Value, mindust, maxdust, 255, 0); if (PM2_5Value = maxdust) { digitalWrite(HUMIDIFIER, HIGH); } else { digitalWrite(HUMIDIFIER, LOW); } if(firstr < neor){ neor = neor - 1; } else { neor = neor + 1; } if(firstg < neog){ neog = neog - 1; } else { neog = neog + 1; } if(firstb < neob){ neob = neob - 1; } else { neob = neob + 1; } pixels.setPixelColor(0, pixels.Color(neor, neog, neob)); pixels.show(); delay(10); } void measuredust(){ static unsigned long OledTimer=millis(); if (millis() - OledTimer >=10000) { OledTimer=millis(); if(PMSerial.find(0x42)){ PMSerial.readBytes(buf,LENG); if(buf[0] == 0x4d){ if(checkValue(buf,LENG)){ PM01Value=transmitPM01(buf); //count PM1.0 value of the air detector module PM2_5Value=transmitPM2_5(buf);//count PM2.5 value of the air detector module PM10Value=transmitPM10(buf); //count PM10 value of the air detector module } } } } } char checkValue(unsigned char *thebuf, char leng) { char receiveflag=0; int receiveSum=0; for(int i=0; i<(leng-2); i++){ receiveSum=receiveSum+thebuf[i]; } receiveSum=receiveSum + 0x42; if(receiveSum == ((thebuf[leng-2]<<8)+thebuf[leng-1])) //check the serial data { receiveSum = 0; receiveflag = 1; } return receiveflag; } int transmitPM01(unsigned char *thebuf) { int PM01Val; PM01Val=((thebuf[3]<<8) + thebuf[4]); //count PM1.0 value of the air detector module return PM01Val; } //transmit PM Value to PC int transmitPM2_5(unsigned char *thebuf) { int PM2_5Val; PM2_5Val=((thebuf[5]<<8) + thebuf[6]);//count PM2.5 value of the air detector module return PM2_5Val; } //transmit PM Value to PC int transmitPM10(unsigned char *thebuf) { int PM10Val; PM10Val=((thebuf[7]<<8) + thebuf[8]); //count PM10 value of the air detector module return PM10Val; }
Credit for this code
Dust sensor - Zuyang @ HUST
LED - NeoPixle Example code
Humidifier - xiaohe
The above board and code were used for my final project!
File
finalcode.ino