MECHANICAL DESIGN. | WEEK 14
Group Assignment
.
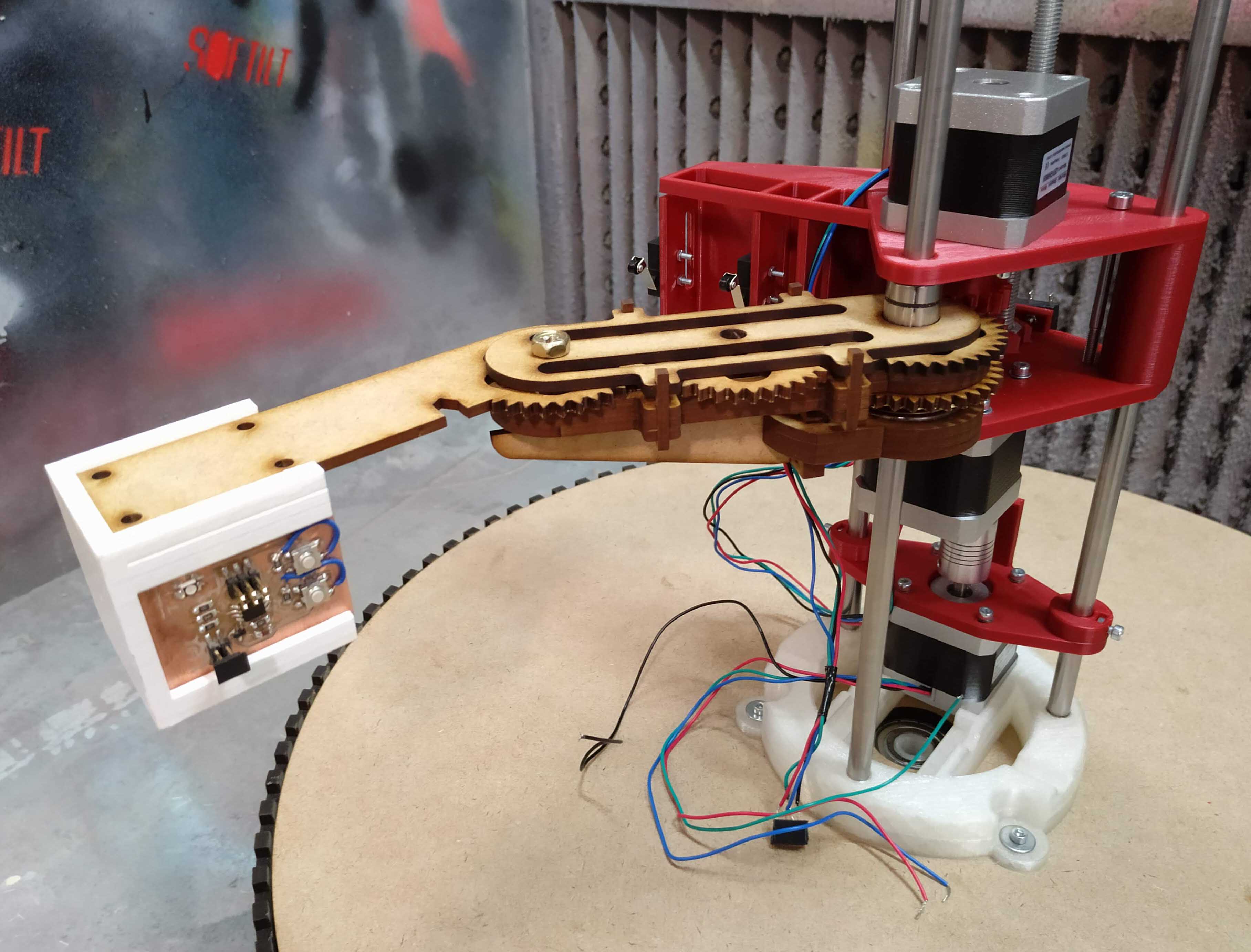
You can see the group assignment hereFor the mechanical design week we chose a "Scara machine", something similar to a robot arm but only in two directions. The machine has four times of movements. Three of them are rotary and the other one is linear and is for the z movement. We based on a version that we found in thingiverse

One of the things that we are going to change is the belts for gears. The reason for this is that belts with an specific size are difficult to find and we can print the belts in our lab when ever we want to.
The second thing is a rotary base, so we can move the arm 360º or more to create spirals or solids around the central tower.
.jpg)
My part in the mechanical design machine was to design and build the base from scratch, modify the existing parts form our model and connect the rest of elements designed by my classmates. I did this final digital assemble because I have more experience and it's the better way to ensure that everything is working fine.
Before that we prepare the BOM together and prepare a basic model. We commit that this model it would be the base for the rest parts.
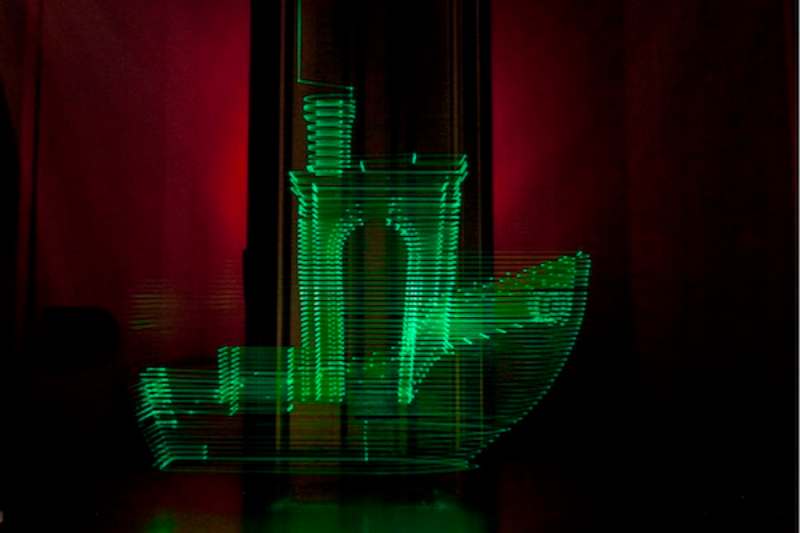
As actuator, we will use a LED output to create light painting pictures.
Wire Connection
The first question is how you connect the wires from the tower to the base and move the base more than one round without the wires get tangled. To answer this we find a part called "slip ring" a very intelligent way to solve this problem. A version can be found in Adafruit But it's too expensive for us (with the shipping expenses the cost is around 40$). We thought about try to build one but it looks too hard for one week.

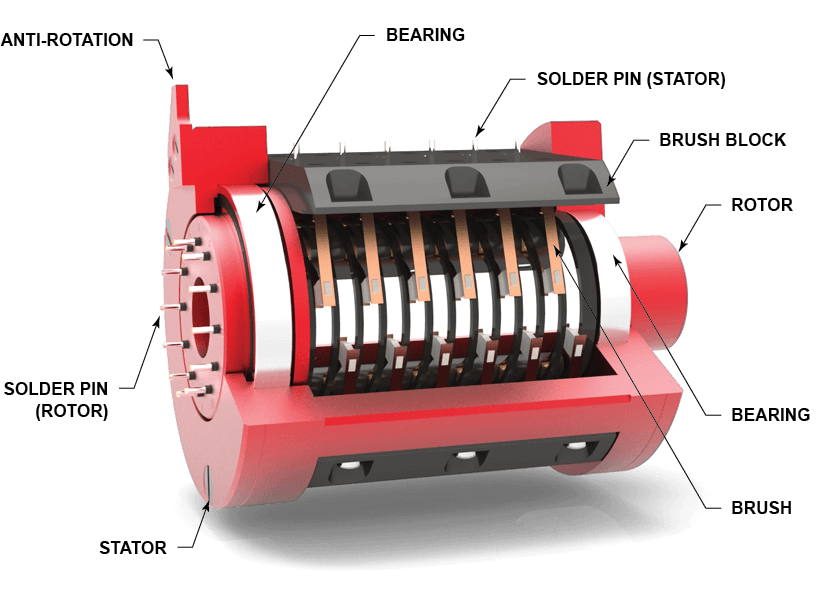
We haven't found the part yet but we are talking with a spanish company focused on industrial supplies to get one.
Axis and movement
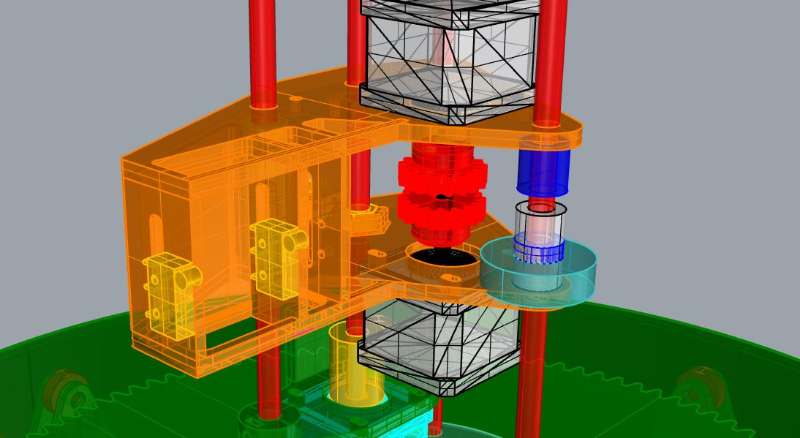
I designed the rotary base as a box were we can hide the arduino and the power supply of our machine. It will made with dm, I want to use flexures for the cylindrical part.
.jpg)
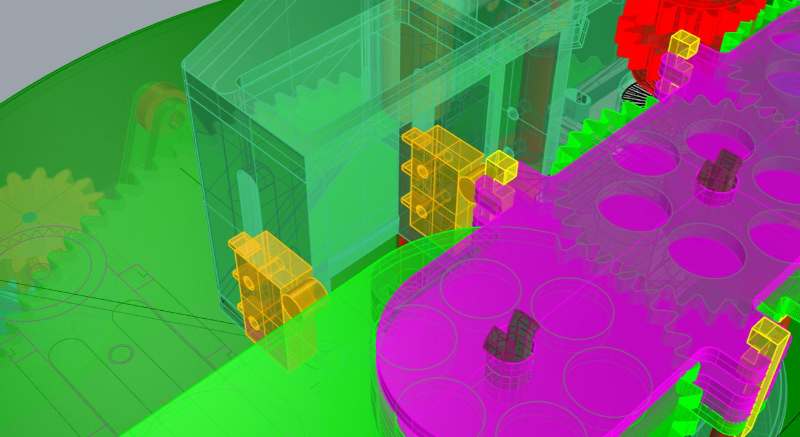
For the movement I combined a central axis with a bearing embedded in the dm and eight rotary supports distributed close to the border, to create them I chose rotary bearings.
.jpg)
Movement and gears
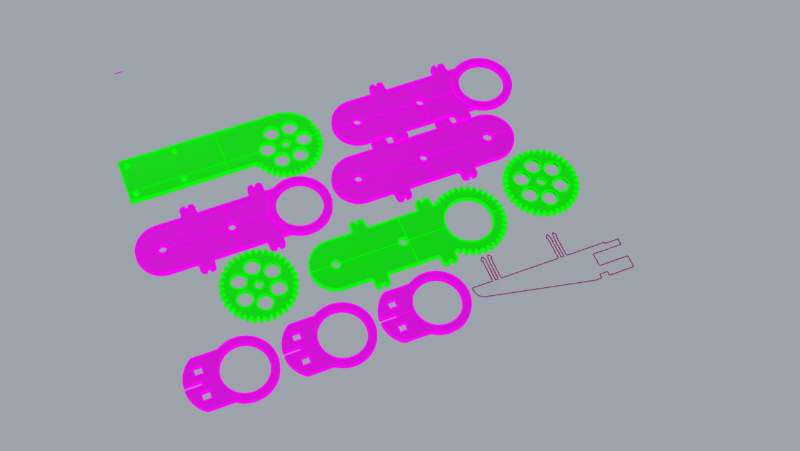
To move the rotary base I need a way to create gears. there are some generators on internet but I finally chose a plugin for grasshopper that I found very useful
.jpg)
I prepare a small code in grasshopper to try different kinds of gears and create the part quickly.

It looks well.
.jpg)
Finally, I adapt the gear for the motor so we could fix it with a screww and prepare a support for the slipring and the wheel in the center.

Base
The base of our model machine was prepare for two motors and it didn't have space enough for the wires so I remodelled, I also did some aesthetics changes.
.jpg)
This is the base after I made my changes.
.jpg)
Arm's support redesign
Here I change the position of the stop-end actuators so they be at the correct position for the new arm and include two tubes to fix the linear bearings, I based in the same system use by Prusa (with a small vertical opening ) so the bearing got fix by pressure.

Also, I prepare the holes for the stop-ends that we bought.
Final adaptation of the arm and the actuator
After my classmates finish with the parts that they have assign I put everything together and made some small corrections: I move a little the motors

Move the endstop and made a little modification in the arm (just some size changes).
Now the model is finished and everything is ready for fabrication

For this part I focused in the laser cuttings parts, which I could cut during the weekend at my job (the fablab was close during five long days) and also part of the 3d printed parts, the reason why I did this is because it was easier for me to get everything done before monday. I use the same machines that I used for the assignments of computer controlled cutting and 3d-print
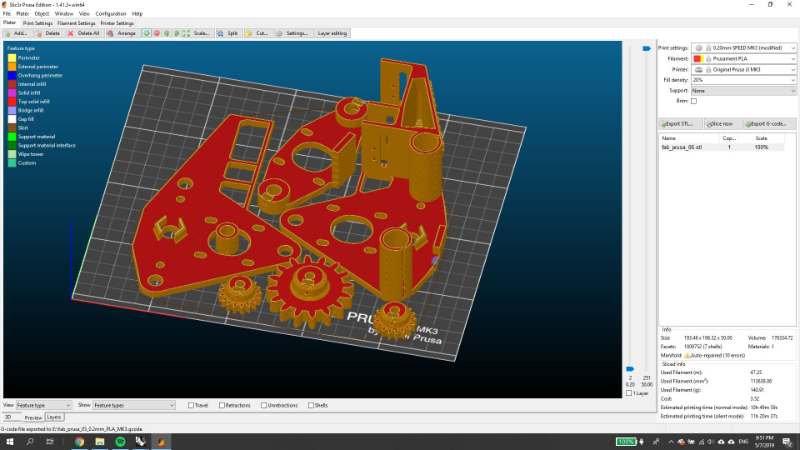
I prepared the files for 3d-print using slic3r, because I was going to use a Prusa MK3s.
.jpg)
I printed some of the parts in my old 3d printer, a CR_10s. But I had a problem with the extrusor and I had to printer again (you can se the bad ones in this pictures, printed with gray filament)
.jpg)
Then I cut with the laser cutting the elements for the base, the material is an MDF board of 5mm. The base is circular so the border needed to be made with flexures.
.jpg)
.jpg)
I used bearings to create wheels that supports the exterior of the base and encaster another one in the center to connect the base with the rotary axis.
.jpg)
Here is the 3d print part used for the center
.jpg)
And the base rotating!
the z axis and the x-y supoort
With the 3d-parts ready to be use I mounted the stepper motor (NEMA 17) and the stop-end sensors. The whole part was designed to stay together without being in the z-axis. It's very cool to feel the weight of the motors and move the whole element in the z bars.
.jpg)
Our signature :)
.jpg)
The biggest part of the machine is now finished, it's time to put it on the machine.
Here is the final result with eduardo's arm and rodrigo's actuator. Looks great, don't you think? I hope that the electronics works as well as the mechanic part.
.jpg)
.jpg)
hero shot video of the first week