1. Principles and practices¶
january, 16
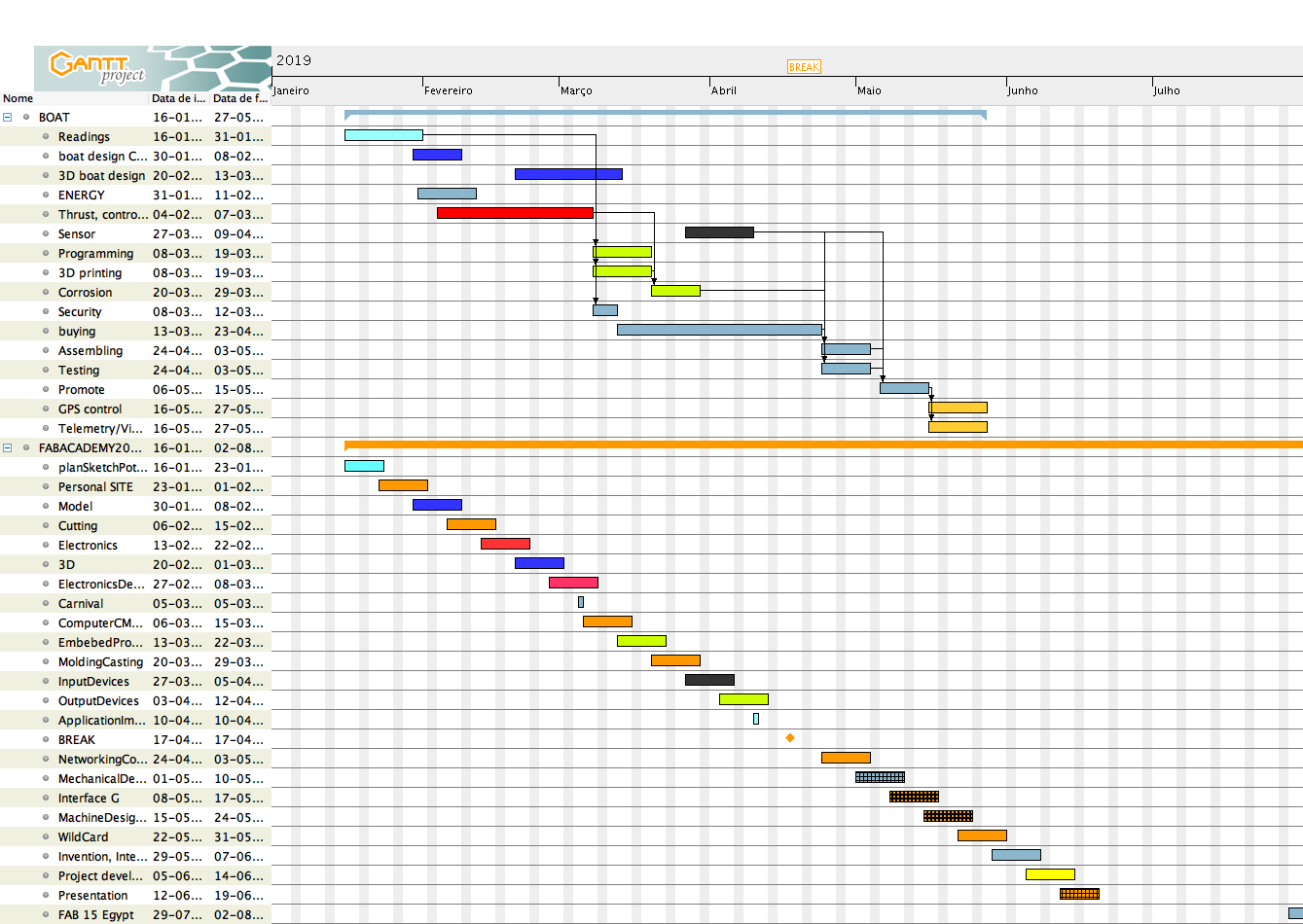
This week I worked on defining my final project idea and started to getting used to the documentation process. I also prepare the projet flow chart with GANTT. Files here
At the first online meeting with professor Neil, after the overall informations, I retain the remarks about the FAB LAB environment, made by is brother:
**Positive** Make within the international collaboration **Negative** Instituitions don't see the value, we need to speak up! The communication is not robust. At this moment the FAB LAB system just speek 99% fabrication and 1% safety. Need to reverse this!
I also notice the importance made professor Neil Gershenfeld about the FABs organization: the need to have a big FAB to support smaller FABs.
We watch a real-time presentation of projects and the remarks made, so that you can clear out what is needed to accomplished the course.
Project plan (first steps with Filipe and José Moura)¶
We start by a previous meeting with Filipe Silvestre and José Moura at the FCT fab lab were we discuss the basic ideas, the possible drawbacks, the crucial strategies, the main constrains and the steps needed for the first weeks.
After the readings I try to make same project basic analog drawings at my log book. Showed to Filipe, discuss the dimensions, the plan B, C, D, … We define the major tasks and started to sketch them in a time flow chart.
I turned to the digital world. GANTT is very easy to use. This chart is named after Henry Gantt (1861–1919). He added interdependencies that the german Hermann Schürch charts didn’t have but were comonly used in Germany in the early nineteenth century.
The only issues was about the GANTT linking arrows and assignments time schedule customization:
- Firts I inserted the fabacademy2019 assignments;
- Then, I insert the boat “aqua nostra” tasks, I use the arrows to linked them and the changes were huge.
- Them I try to adapt the tasks to the assigments timetable, in order to follow the Neil Gernshenfeld first lesson tips about the course strategies.
- I didn’t know the way to delete them and with the help of Luis Carvão it was easy.
- The name of boat project came about at dinner with “my most everything”. So, its ok!
Local Meeting (with Luis Carvão)¶
By the end of the week we plan a local week meeting that took place in the same day as the Neil lesson.
We did discuss the crucial moments in the course and strategies to overcome dificulties. Luis reinforced the need to keep in touch with the schedule and to accomplish the next week assignment, project plan and the website. Most important, the need to focus on goals that are feasible and the utmost: keep it simple.
He refer also to the importance of a clean site. Gave several examples of templates. Drawbacks: lots of pictures and less words; or the opposite… not good!
Link the images to the fulltext and separate what is the group assignement and the individual work.
Project settings (IDEA)¶
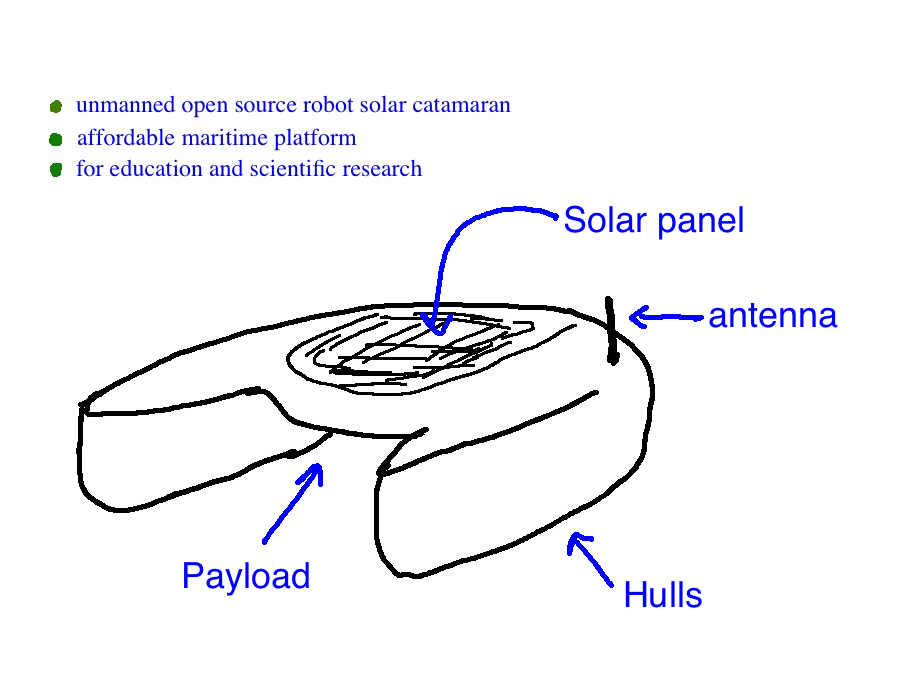
The main purpose of this opensource unmanned robot solar catamaran boat is to be used as an affordable maritime platform for education and scientific research.
This platform is fully 3D printed with PLA and can be controlled by GPS way points or by radio. The design enables to transport an inner platform where it is possible to assemble several types of sensors for water quality, microplastics detection, sonar or just to test electronics and programing.
This prototype 1,5 m long, has width of 1 m and 0,8 m height. It weights around 50 kg, it has a maximum payload of 15 kg with a max volume 60L (L500xW400xH300mm) and can move at speed of 1 m/s.
It has two security buttons to stop running and two inflatable bags in the case of sink. The main source of energy is solar but it can be charged when docked. It as two DC motors of 100 W each.
This project can be promoted as an assembled vessel or DIY kit.
Project Main Readings/References¶
- Solar Boat Borella;
- Design, Development and Testing of the Modular Unmanned Surface Vehicle Platform;
- An Autonomous Surface Vehicle for Water Quality Monitoring
- A new generation of ground-based mobile platforms for active and passive profiling of the boundary layer
- Autonomous Surface Vessels
- [Multipropose ASV (VIDEO)] (https://www.youtube.com/watch?v=OZxU29pWiCo)
Advanced Reviews about Unmanned Boat (in time)¶
- NEW PROTOTYPE OF UNMANNED SURFACE VEHICLES
- Unmanned Surface Vehicles, 15 Years of Development
- DESIGN AND IMPLEMENTATION OF AN AUTONOMOUS SURFACE VESSEL
Market¶
Useful links¶
3D models - Openscad CAD¶
I will use FUSION360 later on, with an education licence, mainly because of possibility to make simulations and crucial technical measurements features, but for now, I use ONSHAPE in the first step project idea.