Output Devices
MOTORS.
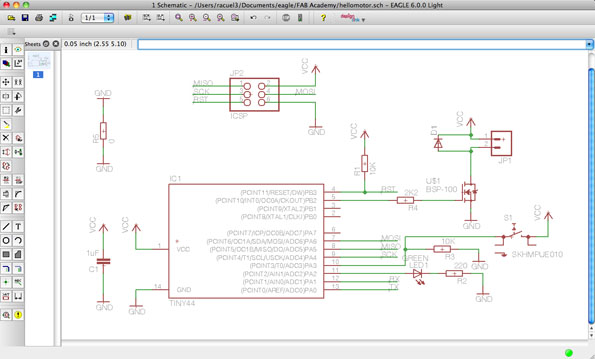
1_Design a new PCB to be able to controlled a motor.
We need a MOSFET ( transistor) to be able to apply a small current and the transistor will transform this small current into a value enough to move the motor.
_Schematic board_helloMotor
File: Schematic file.sch
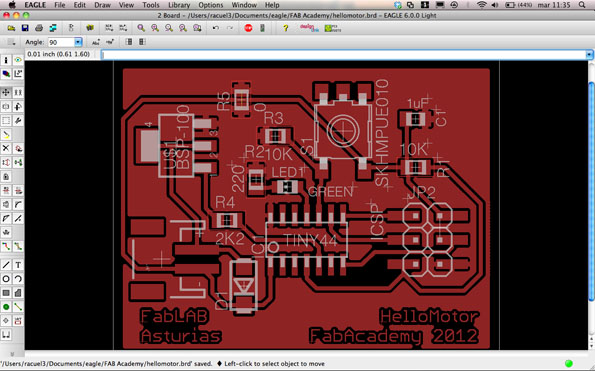
_Board_ HelloMotor
File: Board file.brd
Milling the board
Files: Hello Motor.ps,Hello Motor.png
{kind=link}
CODE
/* Hello Motor Applying a PWM to control how the motor moves. */ //Global variable int motorspeed=0; void setup() { // initialize the digital pin as an output. // Pin 8 has an LED connected on most Arduino boards: pinMode(8, OUTPUT); } void loop() { int m; int entrada; analogWrite(2, motorspeed); // reading the digital value of pin number 7 entrada = digitalRead(7); // If we pressed the bottom increase the PWM value if (entrada == HIGH) { motorspeed = motorspeed+10; if (motorspeed>255) motorspeed=0; delay (50); } }
OSCILLOSCOPE TEST
VIDEO MOTOR RUNNING